Downloaded 121 times



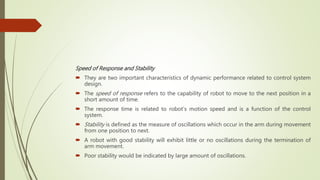

There are three main categories of industrial robots based on path control: limited sequence robots, playback robots with point-to-point control, and playback robots with continuous path control. Limited sequence robots use limit switches to control joint positions and are best for pick and place operations. Playback robots can be taught paths and positions which are stored and repeated; point-to-point robots move between defined points while continuous path robots can precisely follow curved paths like those needed for arc welding. The stability and speed of a robot's movements are important and can be controlled through damping elements, with higher damping providing more stability at the cost of slower speeds.































































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)








