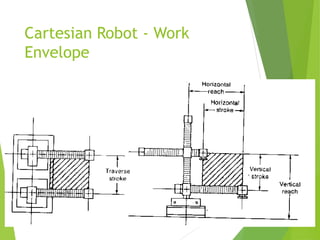
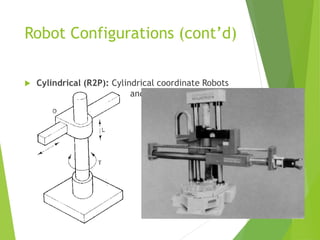
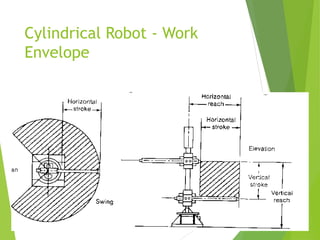
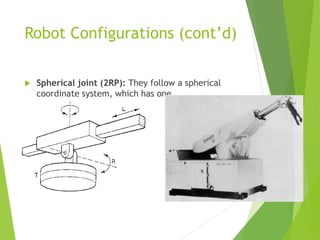
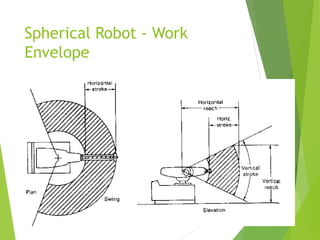
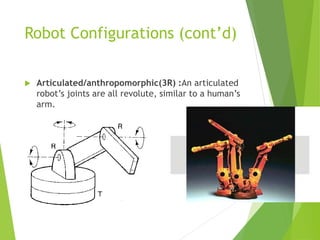
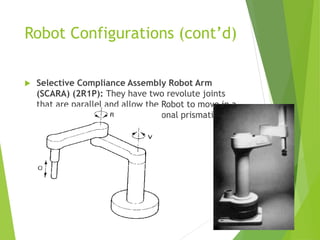
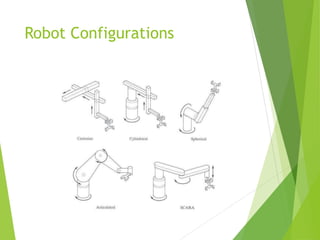
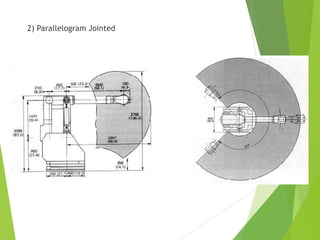
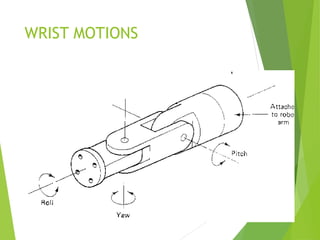
The document provides an introduction to robotics, including a timeline of important developments, classifications of different types of robots, robot components and accessories, reference frames, work volumes, programming methods, and applications of robots in manufacturing. It describes common robot configurations like Cartesian, cylindrical, spherical, and articulated robots as well as their work envelopes. The document also covers robot control methods, including non-servo control, point-to-point control, and continuous path control.