This document discusses different approaches for generating smooth motion trajectories for robot arms between an initial and final pose. It covers:
1) Joint interpolation, which interpolates between initial and final joint angle values to move each joint along a smooth path.
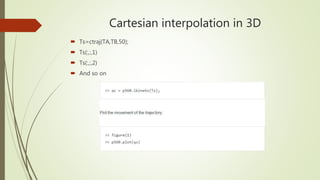
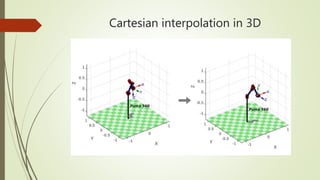
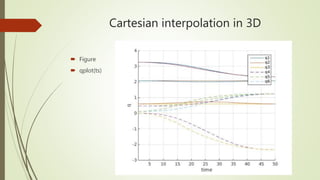
2) Cartesian interpolation, which interpolates directly between initial and final end-effector poses in Cartesian space, computing inverse kinematics at each step.
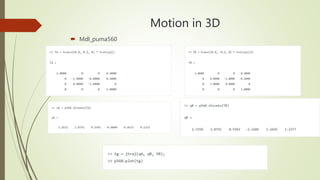
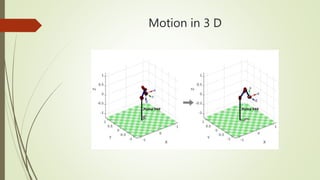
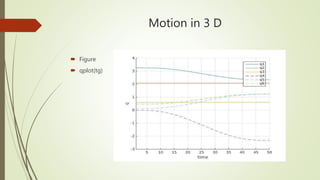
3) Examples of applying these approaches in both 2D and 3D, including generating sample trajectories for a PUMA robot arm.
![Joint interpolation in 2 D
we learned how to interpolate a scalar smoothly between two values. Now, we
want to do this for the robot’s joint values, which are a vector.
We define qA as a vector of the joint values (angles or lengths) at the robot’s initial
position (or pose). For a robot with N oints, this will be a vector of length N .
Similarly , qB s a vector of the joint values (angles or lengths) at the robot’s final
position (or pose), and is the same length as qA
Now we want to find a series of vectors that move smoothly between the values qA
and qB . Consider that qA=(-0.3 , 0.5) and qB=(0.5 ,0.2)
qA=[-0.3 0.5]
qB=[0.5 0.2]
q=jtraj(qA,qB,50)](https://image.slidesharecdn.com/roboticslec6-170316201044/85/Robotics-lec-6-6-320.jpg)
![Cartesian interpolation in 2 D
Now we have made our non-physical robot move as its joint angles followed a
trajectory – it moved from A to B. However, as we saw in the last step, close
scrutiny shows that between points A and B, the robot’s end effector does not
follow a straight line.
For many robot applications, this is not important and joint interpolated motion is
adequate and easy to compute. However, there are some applications where
following a straight line is important – perhaps the robot is doing a cutting or
welding task. The solution we require is called Cartesian interpolation, and involves
interpolating points in the 2-dimensional (2D) Cartesian coordinate frame rather
than the 2D robot joint space. Consider two points in the 2D Cartesian coordinate
frame
qA=[-0.3 0.5]
qB=[0.5 0.2]
q=mjtraj(@tpoly,qA,qB,50)](https://image.slidesharecdn.com/roboticslec6-170316201044/85/Robotics-lec-6-7-320.jpg)