Downloaded 1,333 times
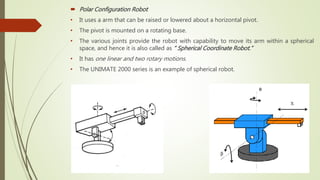

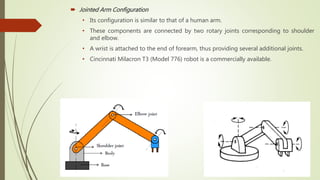


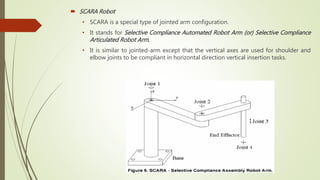


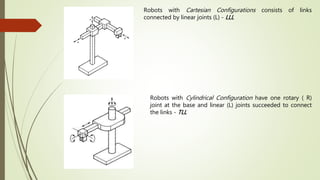
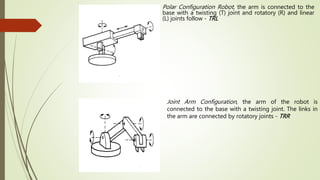
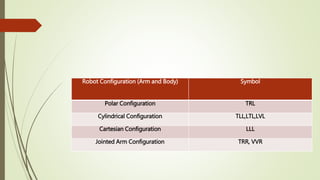
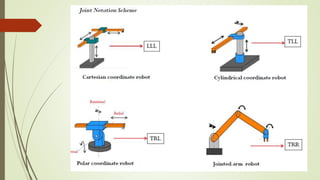

The document discusses different robot configurations including polar, jointed arm, and SCARA configurations. A polar configuration robot has a spherical work volume defined by one linear and two rotary motions. It has advantages of a larger work envelope and more compact size but lower accuracy. Jointed arm configurations resemble a human arm with rotary shoulder and elbow joints. SCARA robots are a type of jointed arm designed for horizontal insertion tasks.