Downloaded 29 times
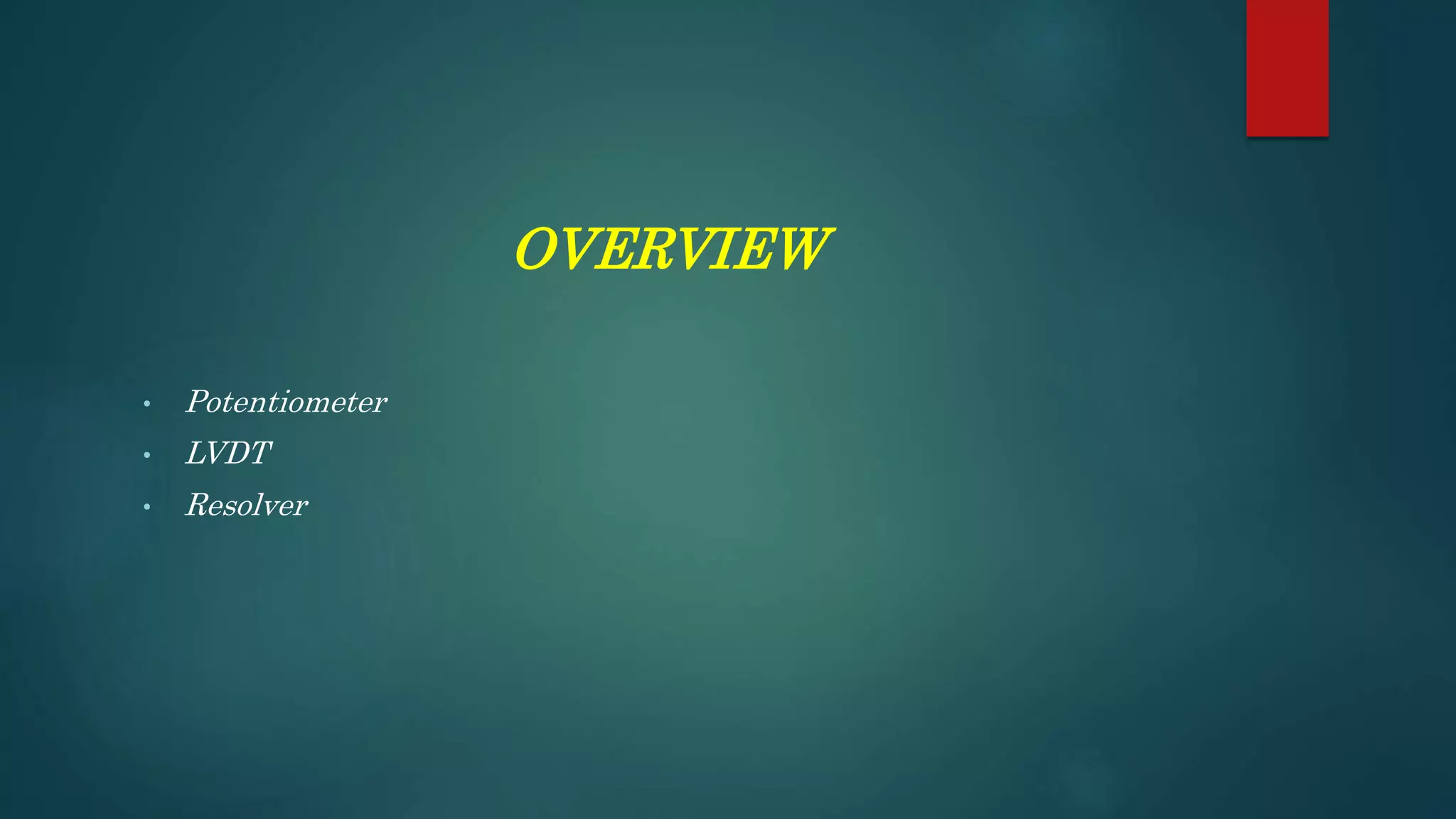
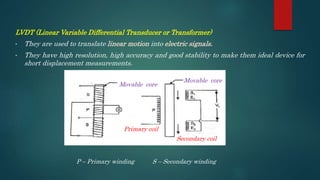
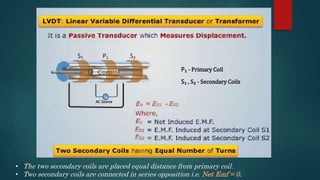

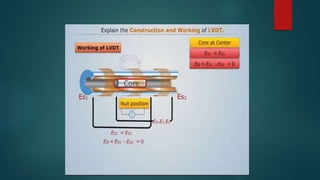
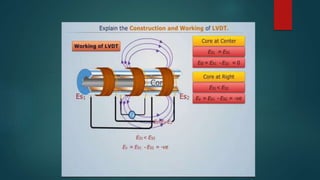
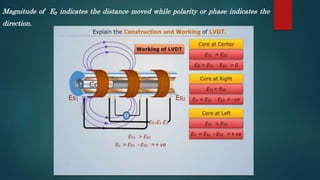

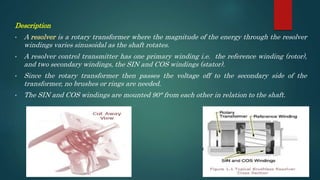
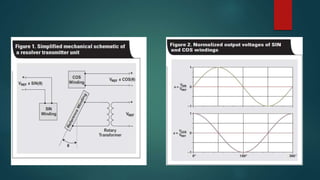

This document summarizes three transducers: a potentiometer, LVDT, and resolver. A potentiometer converts rotational or linear displacement into a potential difference based on the position of a wiper along a resistor. An LVDT translates linear motion into electrical signals using a movable core within primary and secondary coils. It determines displacement by measuring the induced voltage. A resolver measures rotational degrees using a rotating shaft to induce voltages on stationary coils, producing sine and cosine feedback currents whose magnitudes indicate the shaft angle.



























































![Lesson[1] .pdf input transduder notes](https://cdn.slidesharecdn.com/ss_thumbnails/lesson1-240610175041-c8777e45-thumbnail.jpg?width=640&height=640&fit=bounds)














































