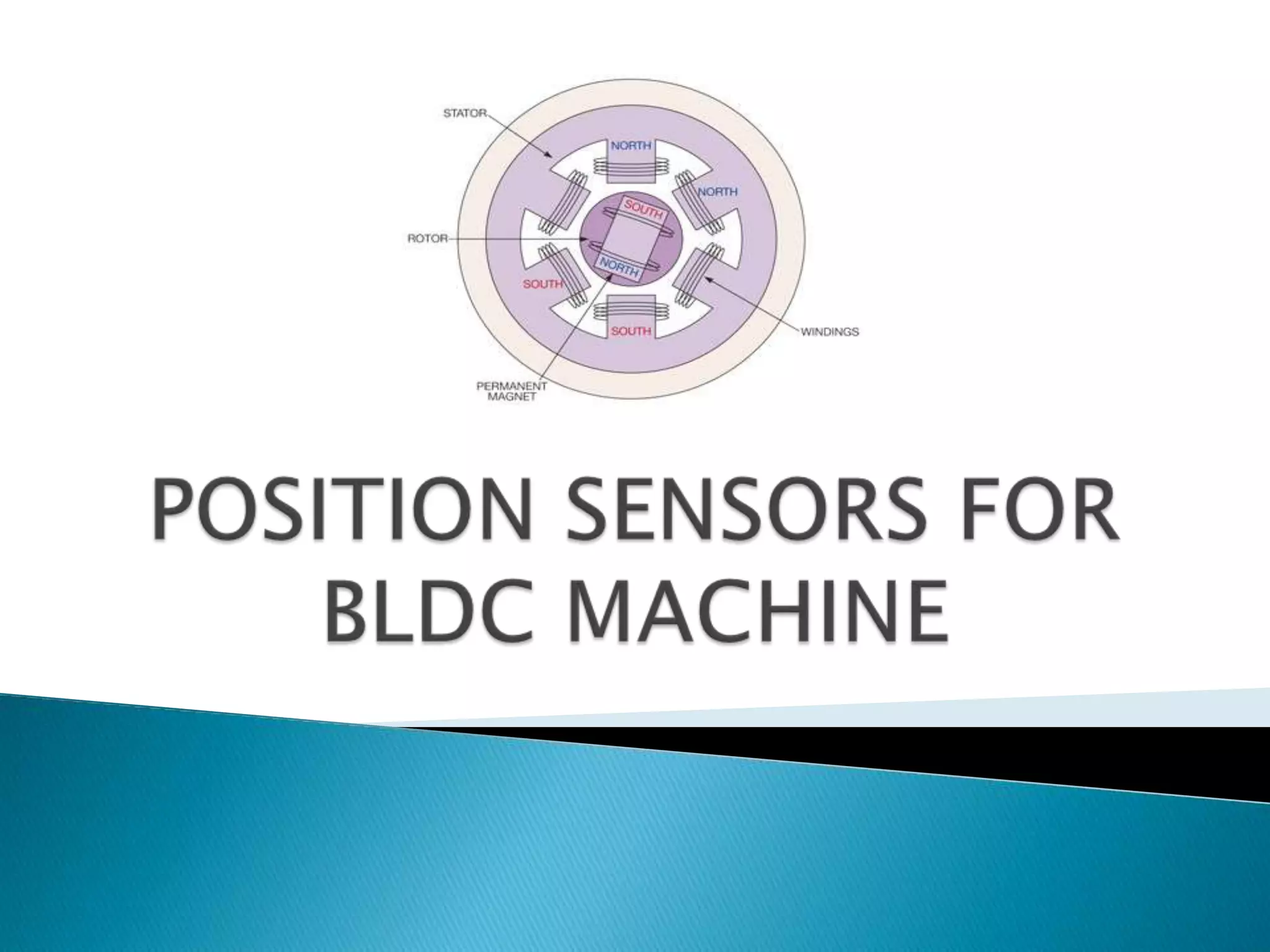
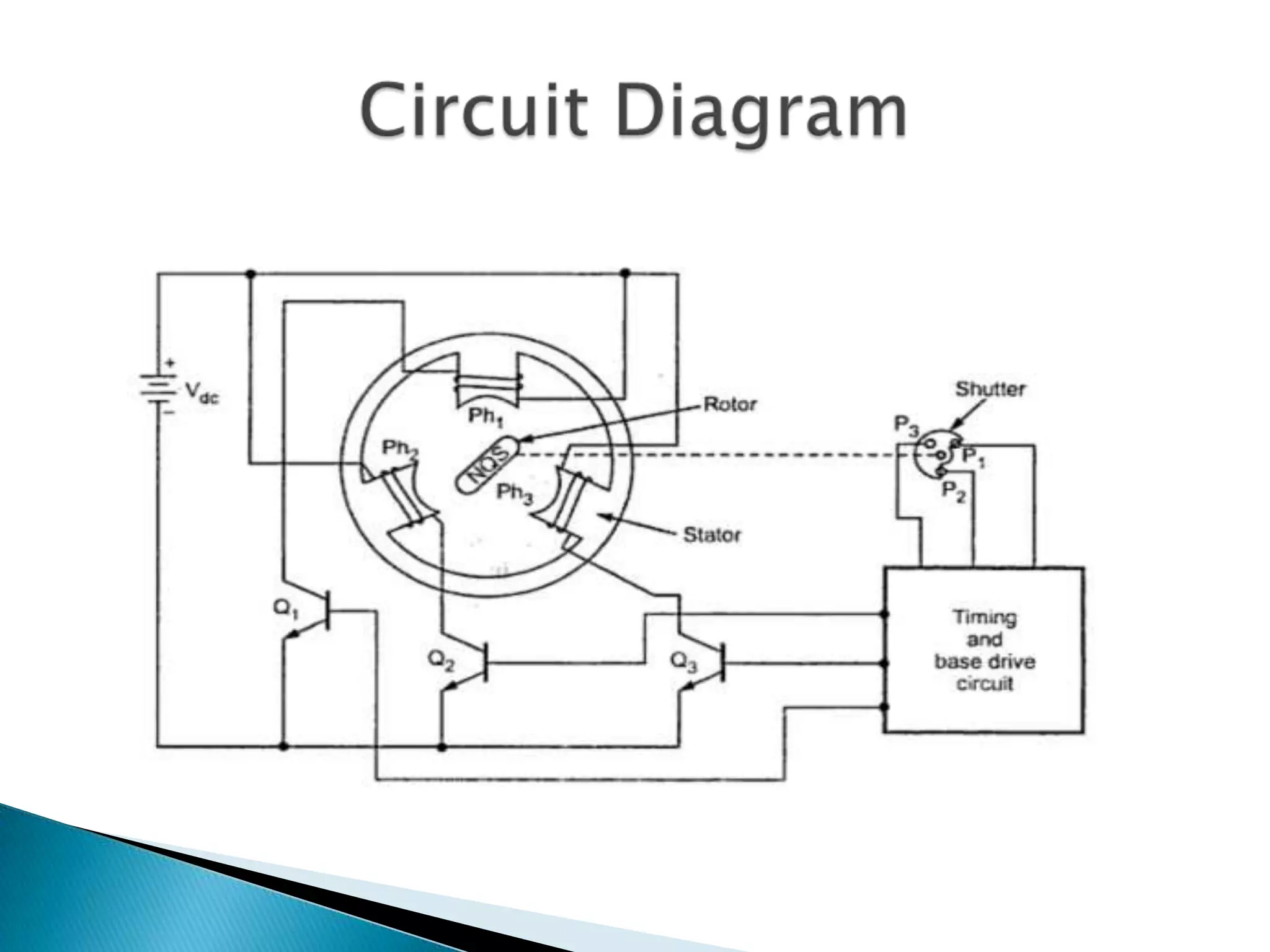
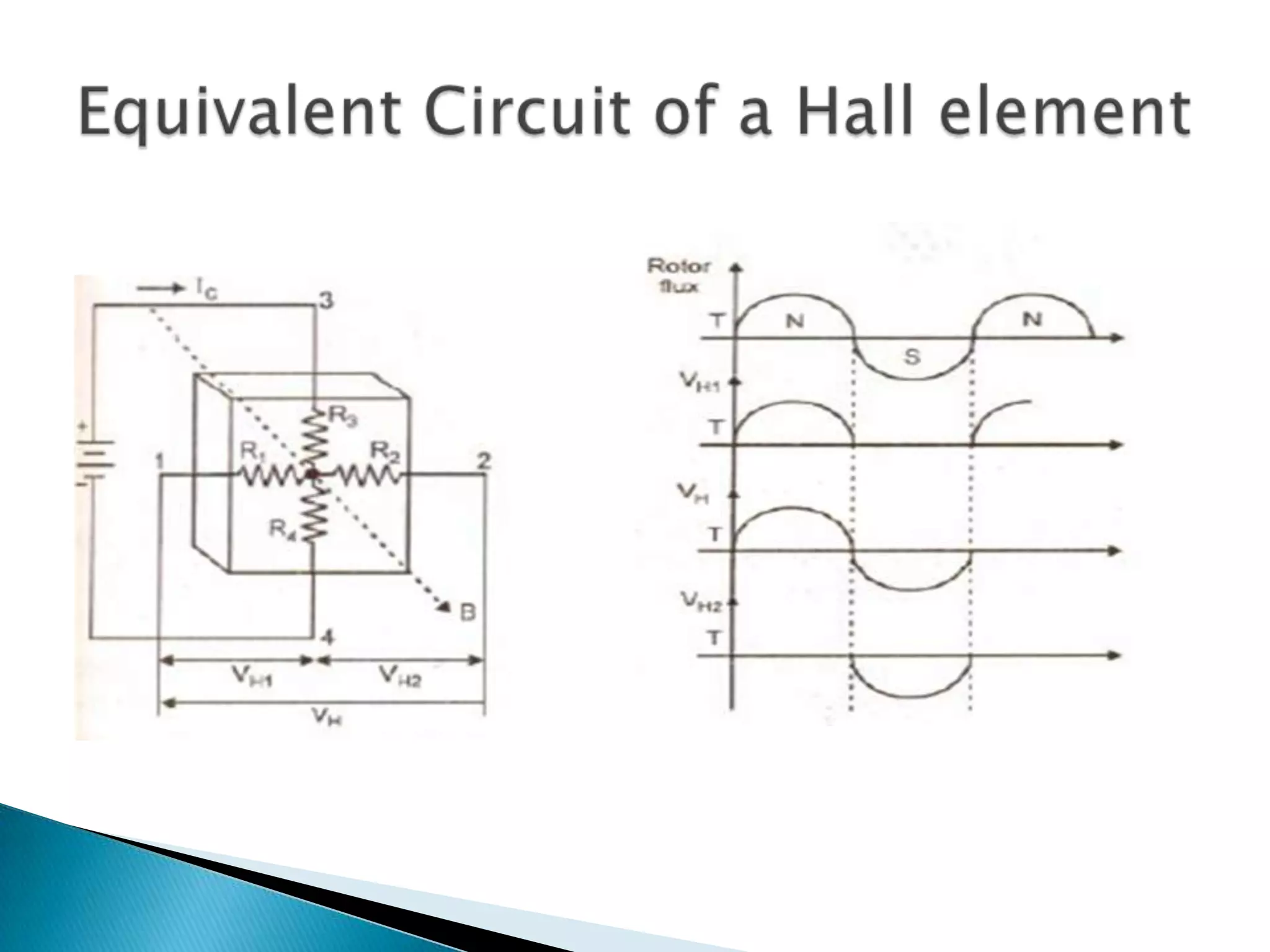
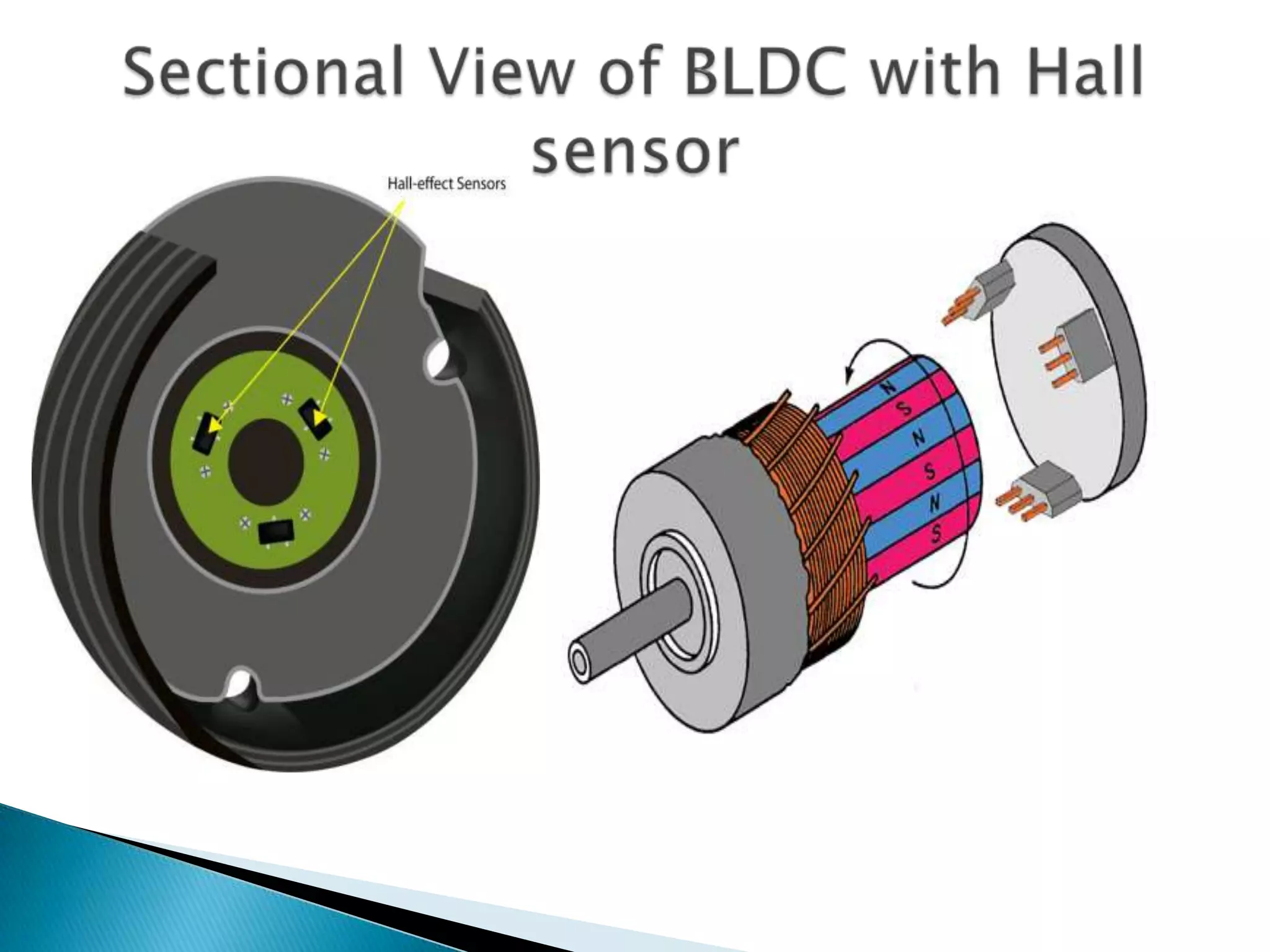
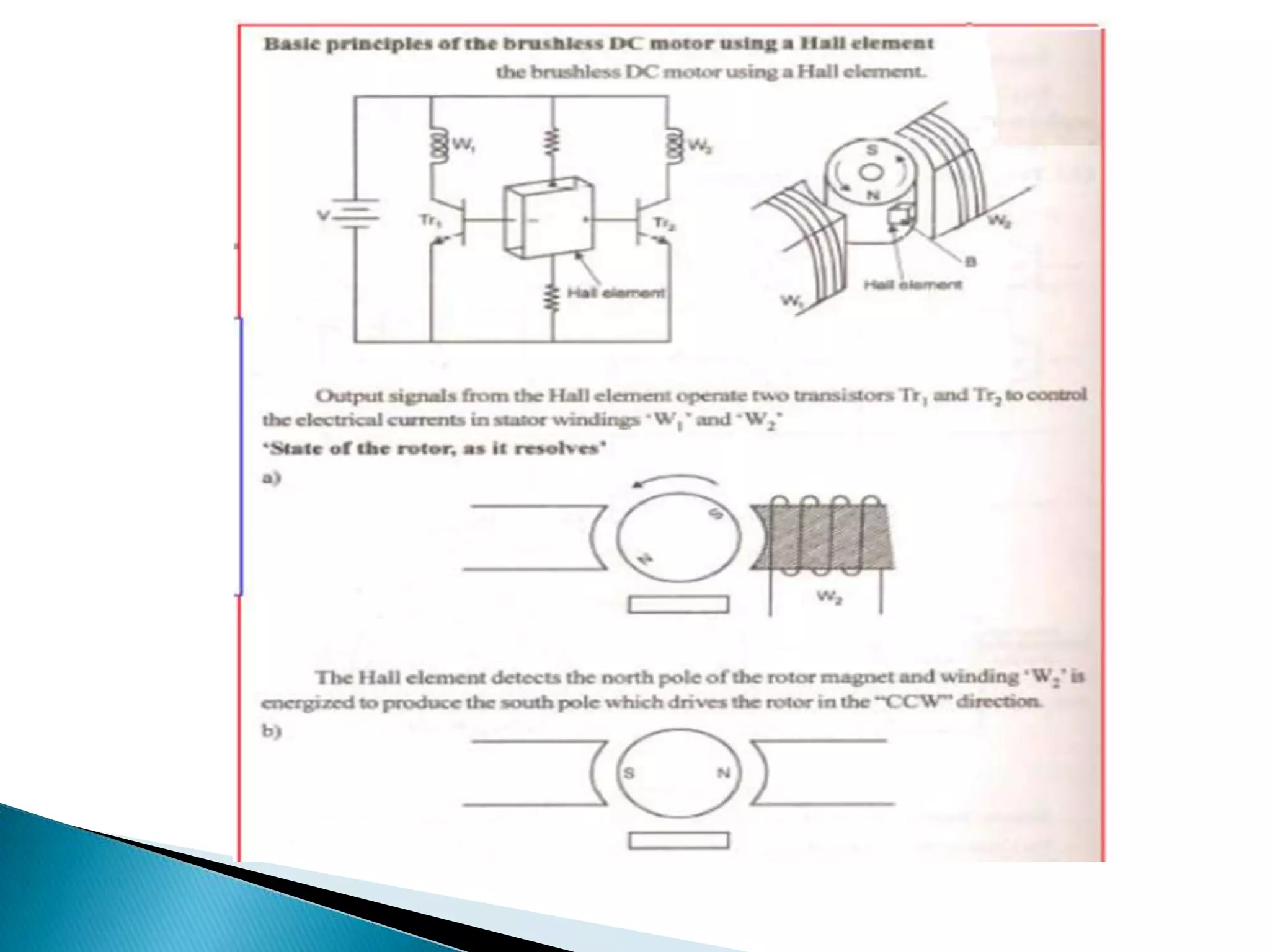
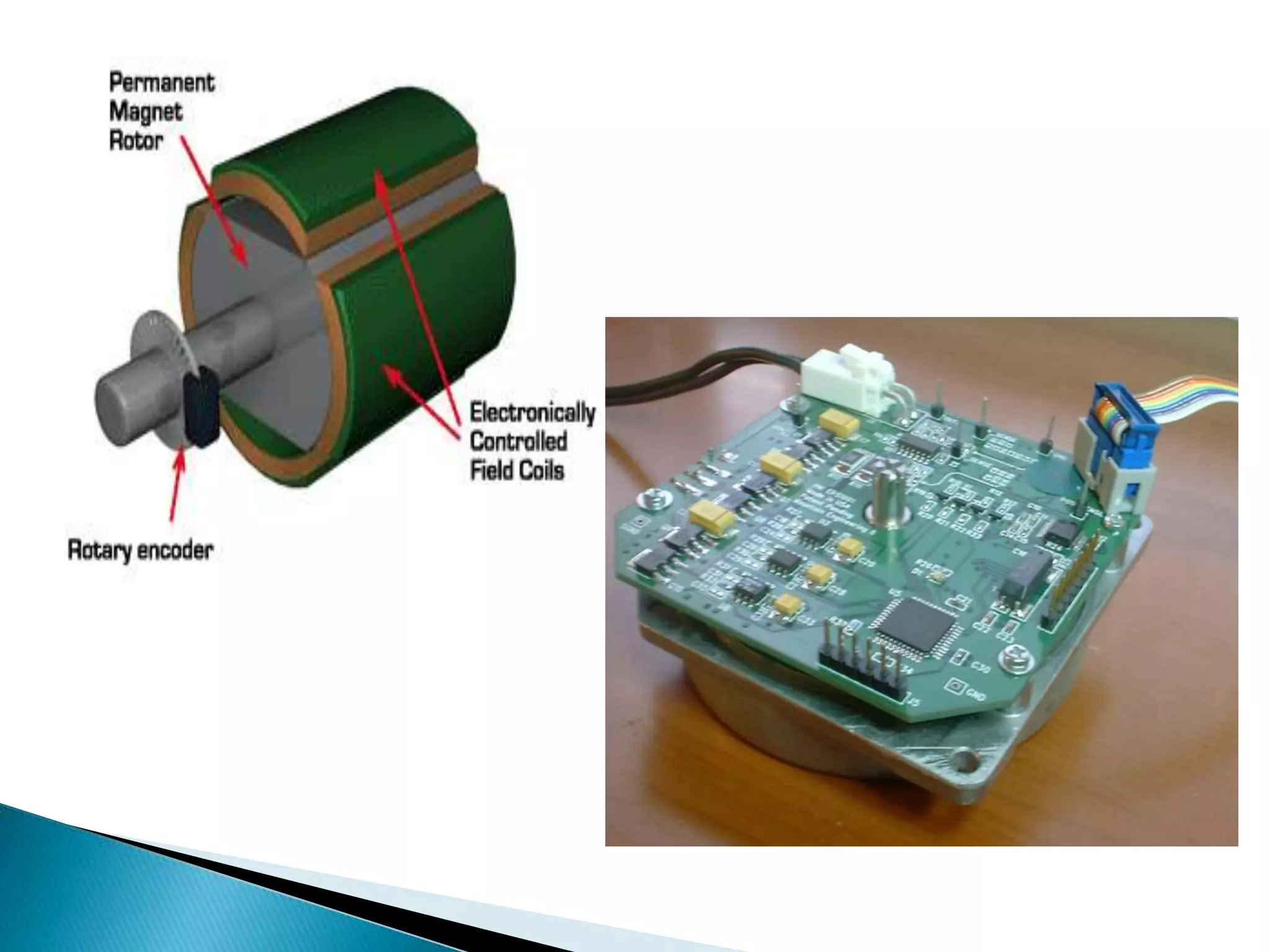
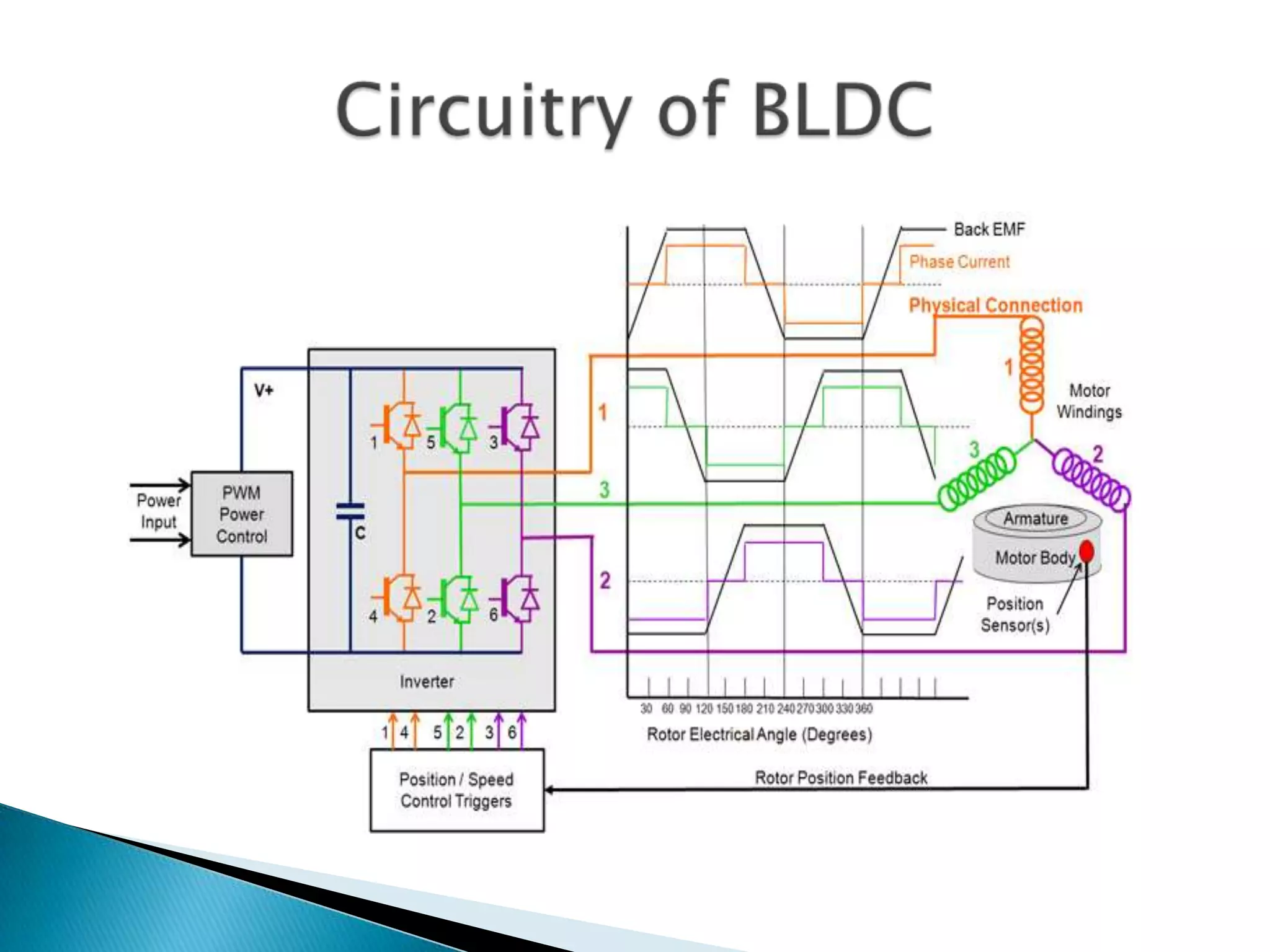
The document discusses different types of position sensors used in brushless DC motors. It describes how Hall effect sensors detect the rotor position by sensing changes in the magnetic field as poles pass by. Optical sensors use a light source and phototransistors to generate pulses as a shutter coupled to the rotor revolves. Sensorless methods can also determine position by sensing zero crossings of unenergized winding currents.