Download to read offline
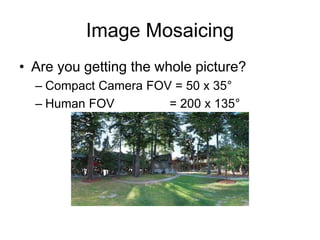
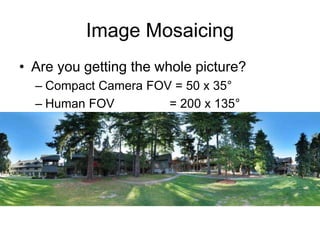
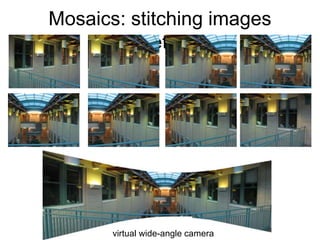
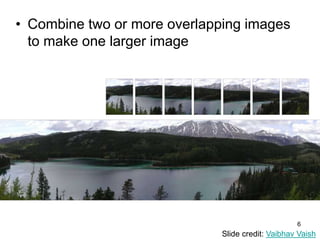
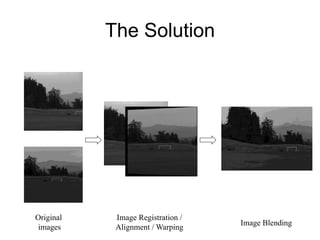
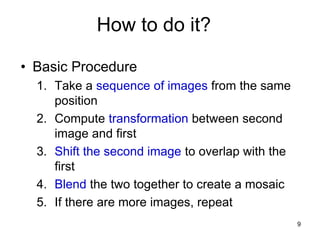

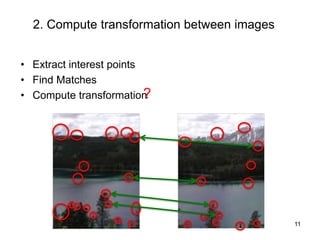
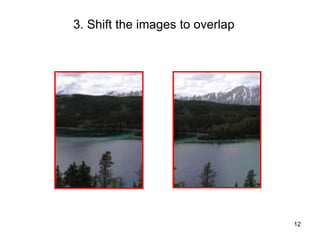
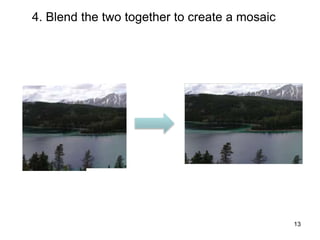
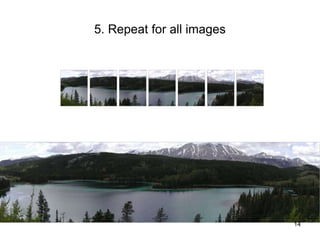
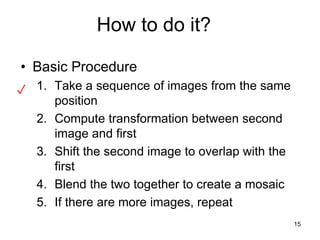
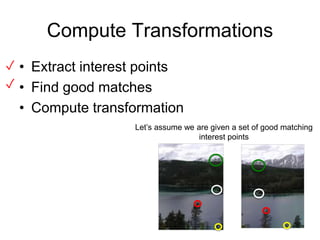
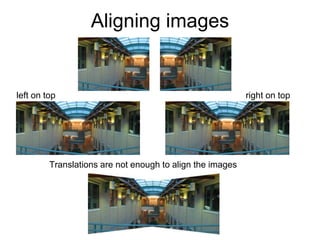
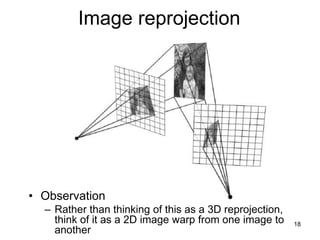
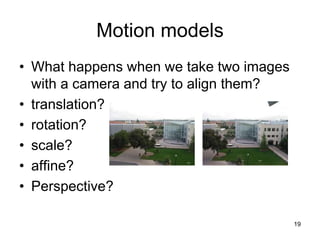

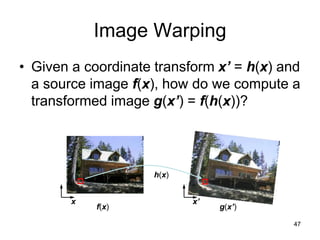
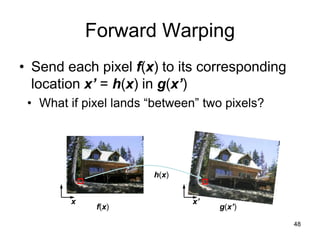
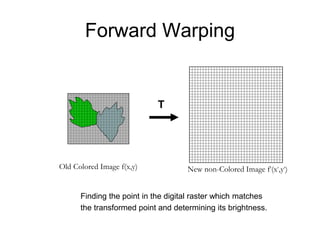
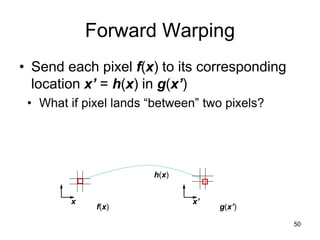
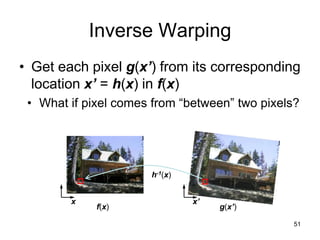
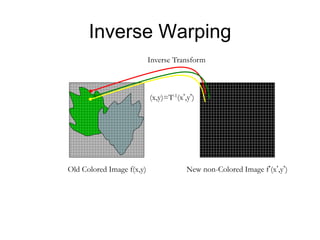
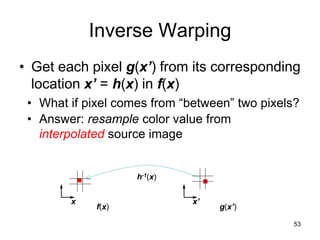
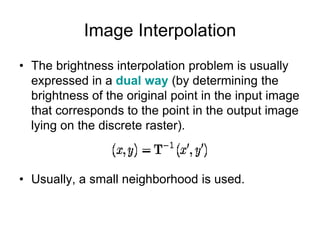
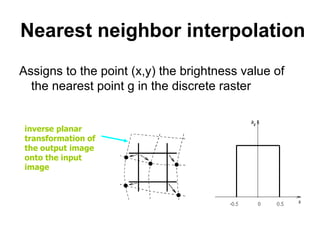
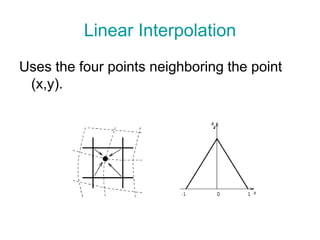

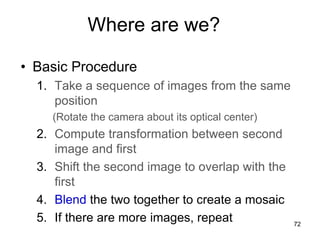
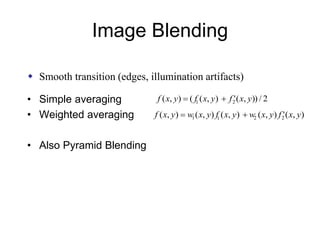
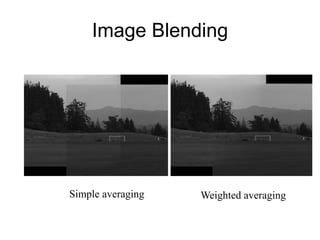
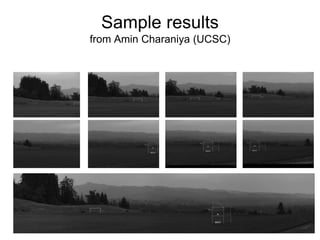
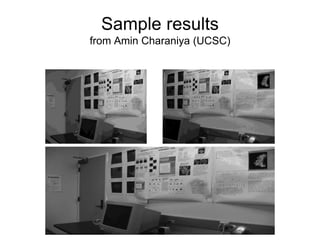


Image mosaicing involves stitching together multiple overlapping images to create a panoramic mosaic. The key steps are: 1) Taking a sequence of images from the same position and computing the transformation between each image, 2) Warping the images to align them by shifting pixels according to the transformation, and 3) Blending the aligned images together, with techniques like weighted averaging, to produce a seamless mosaic. Key challenges include dealing with moving objects, illumination variations, and interpolating pixel values when pixels are mapped between discrete pixel locations during warping.