Downloaded 73 times


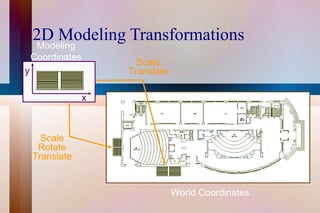
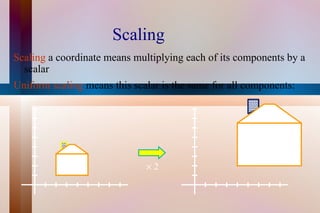
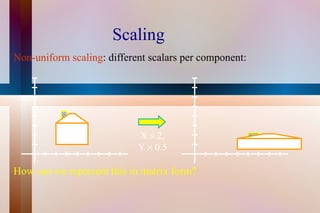
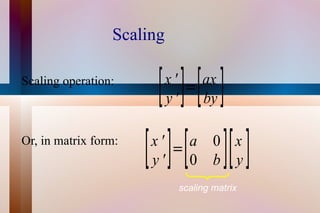
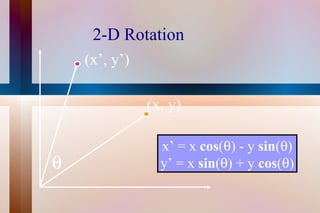
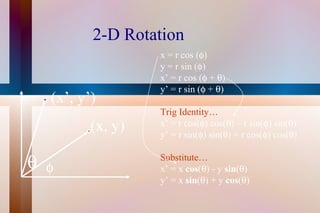
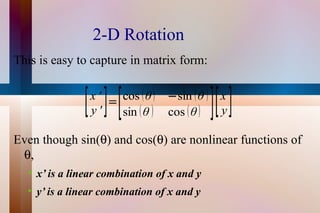
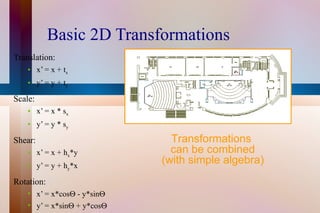
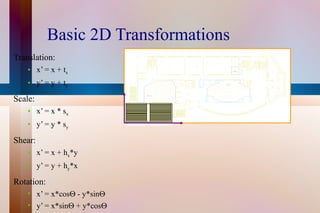
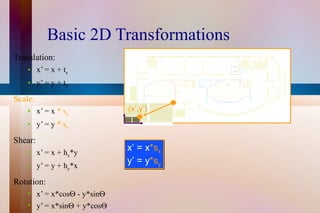
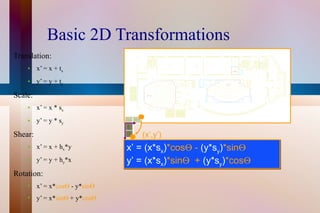
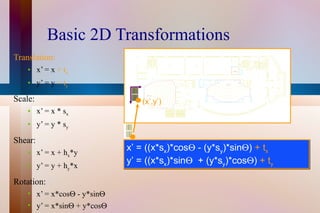
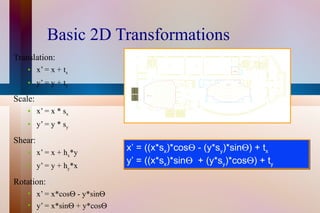
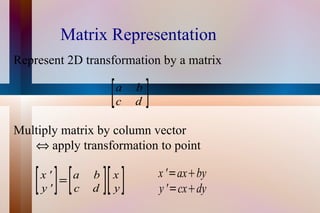
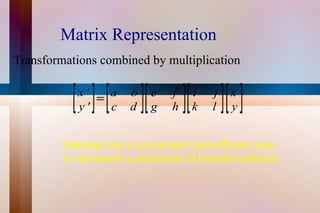
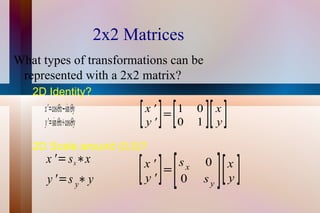
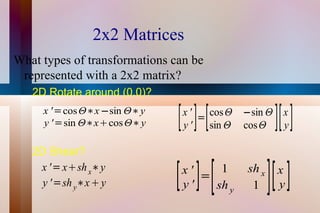
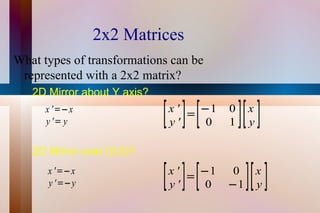
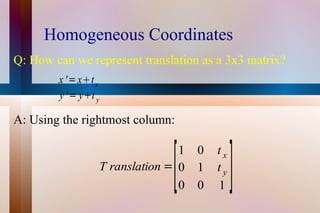
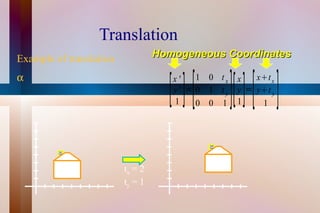
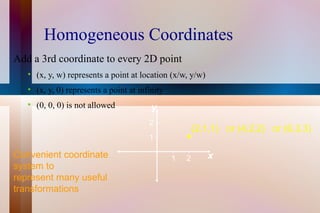
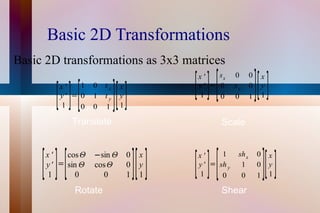
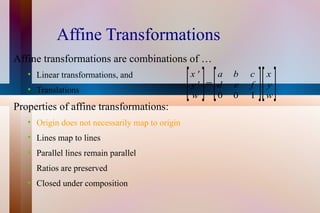
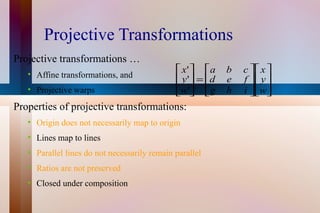
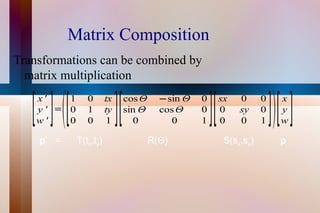
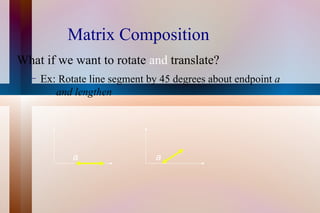
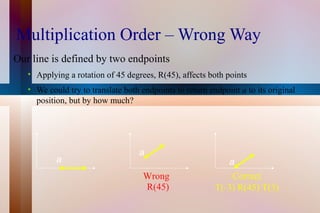
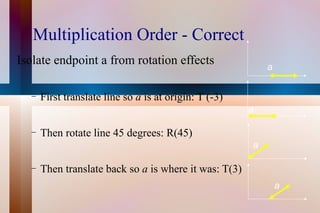
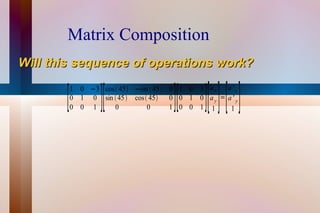
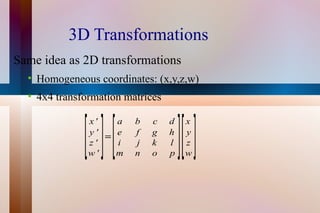
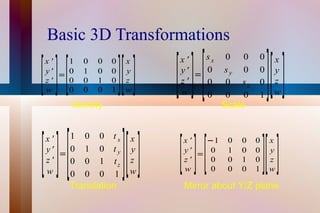
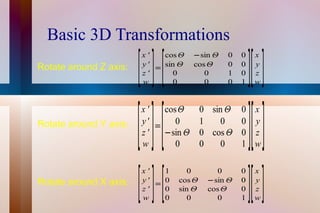
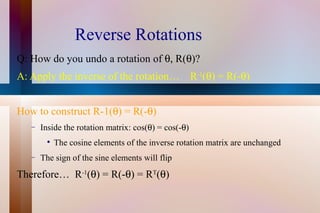

The document discusses 2D and 3D transformations used in computer graphics. It covers topics like scaling, rotation, translation and how they can be represented using matrices. Matrix representations allow multiple transformations to be combined through matrix multiplication. Both linear transformations like scaling and rotation, as well as affine transformations like translation, can be captured with matrices. The order of matrix multiplications is important, as transformations are not commutative. These concepts extend from 2D to 3D graphics using homogeneous coordinates.