Downloaded 12 times






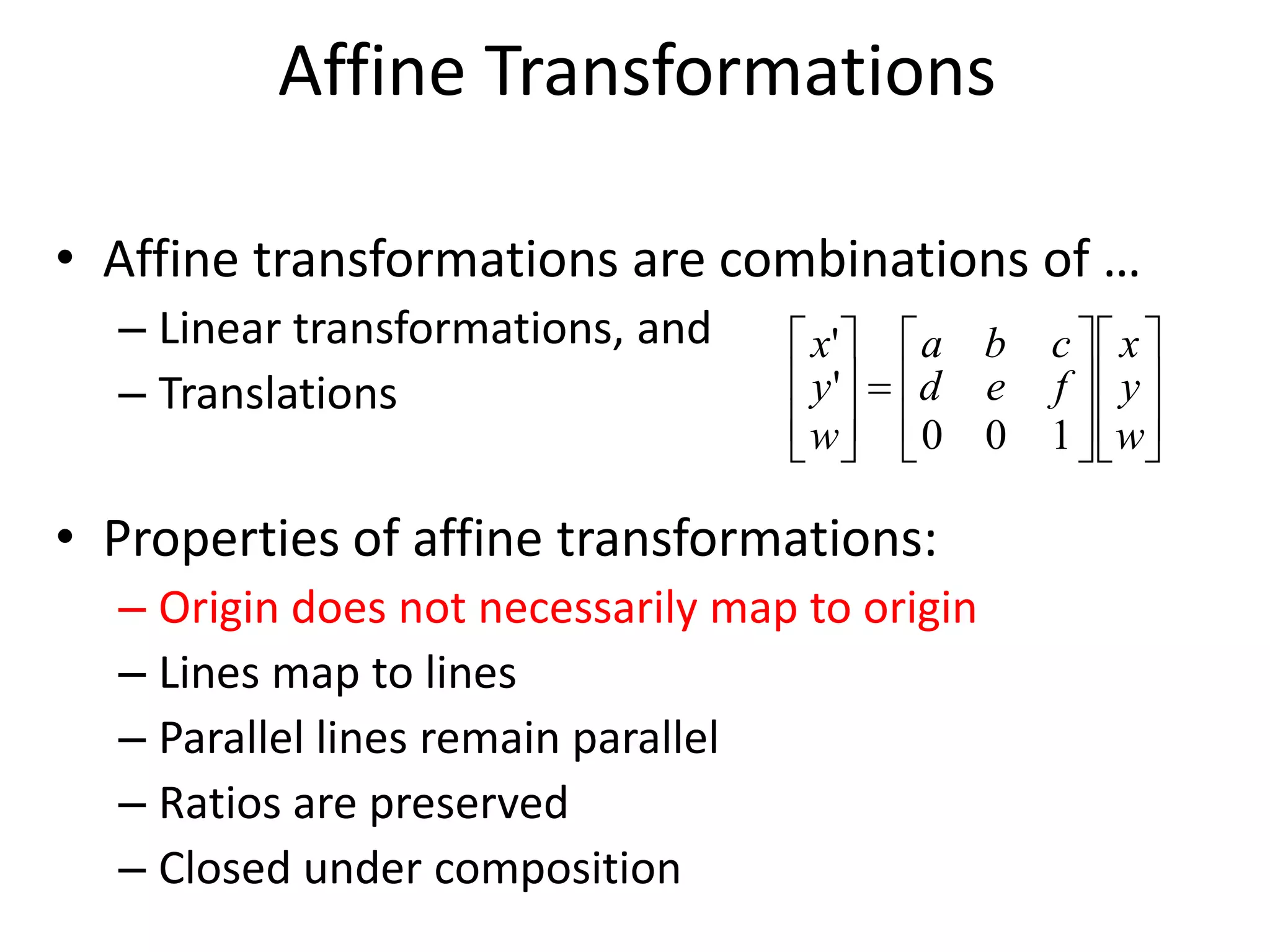
![Affine transformations
any transformation
represented by a 3x3 matrix
with last row [ 0 0 1 ] we call
an affine transformation](https://image.slidesharecdn.com/lec07transformations-200719135222/75/Computer-Vision-transformations-18-2048.jpg)



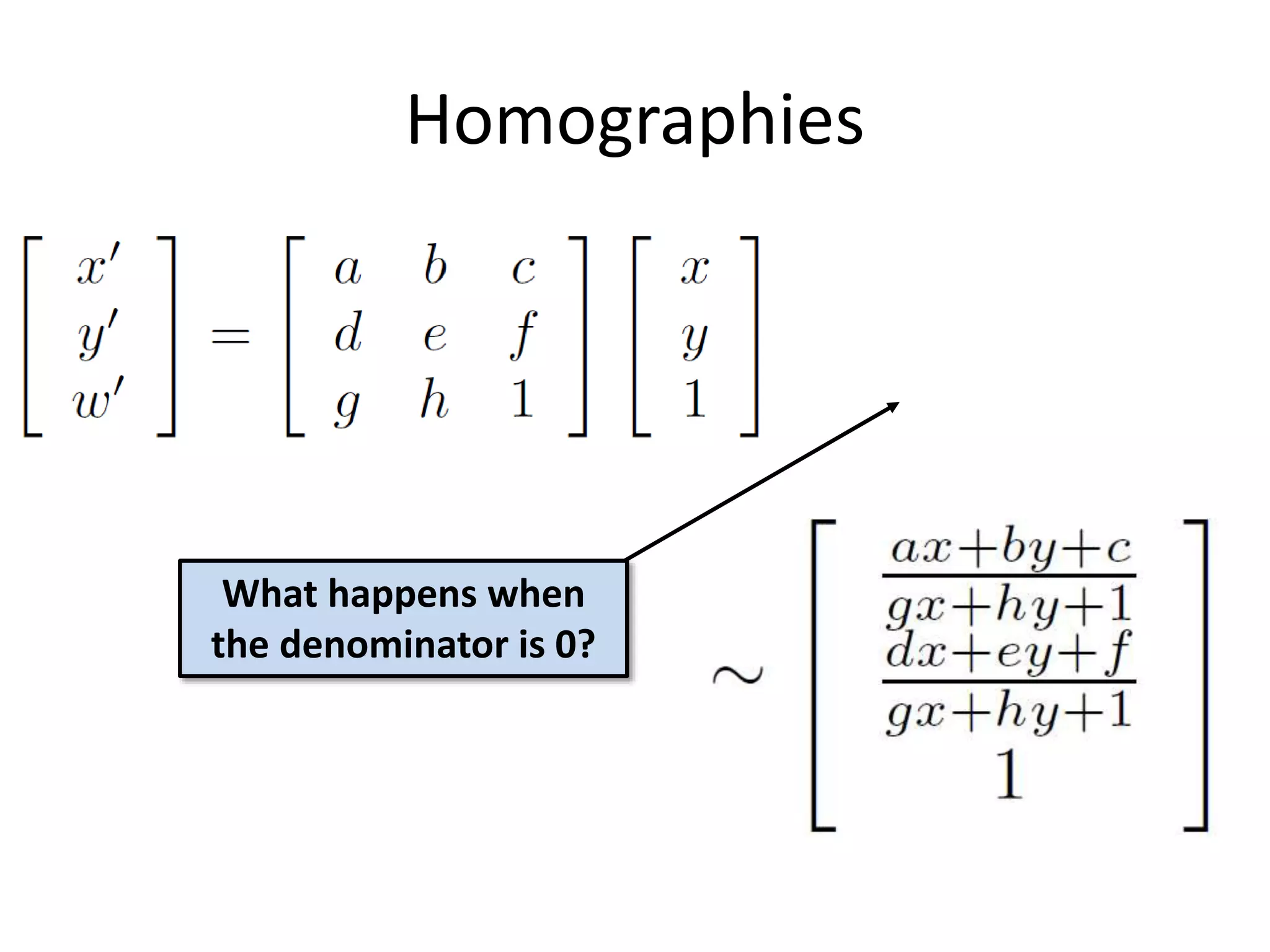



![Alternate formulation for
homographies
where the length of the vector [h00 h01 … h22] is 1](https://image.slidesharecdn.com/lec07transformations-200719135222/75/Computer-Vision-transformations-29-2048.jpg)


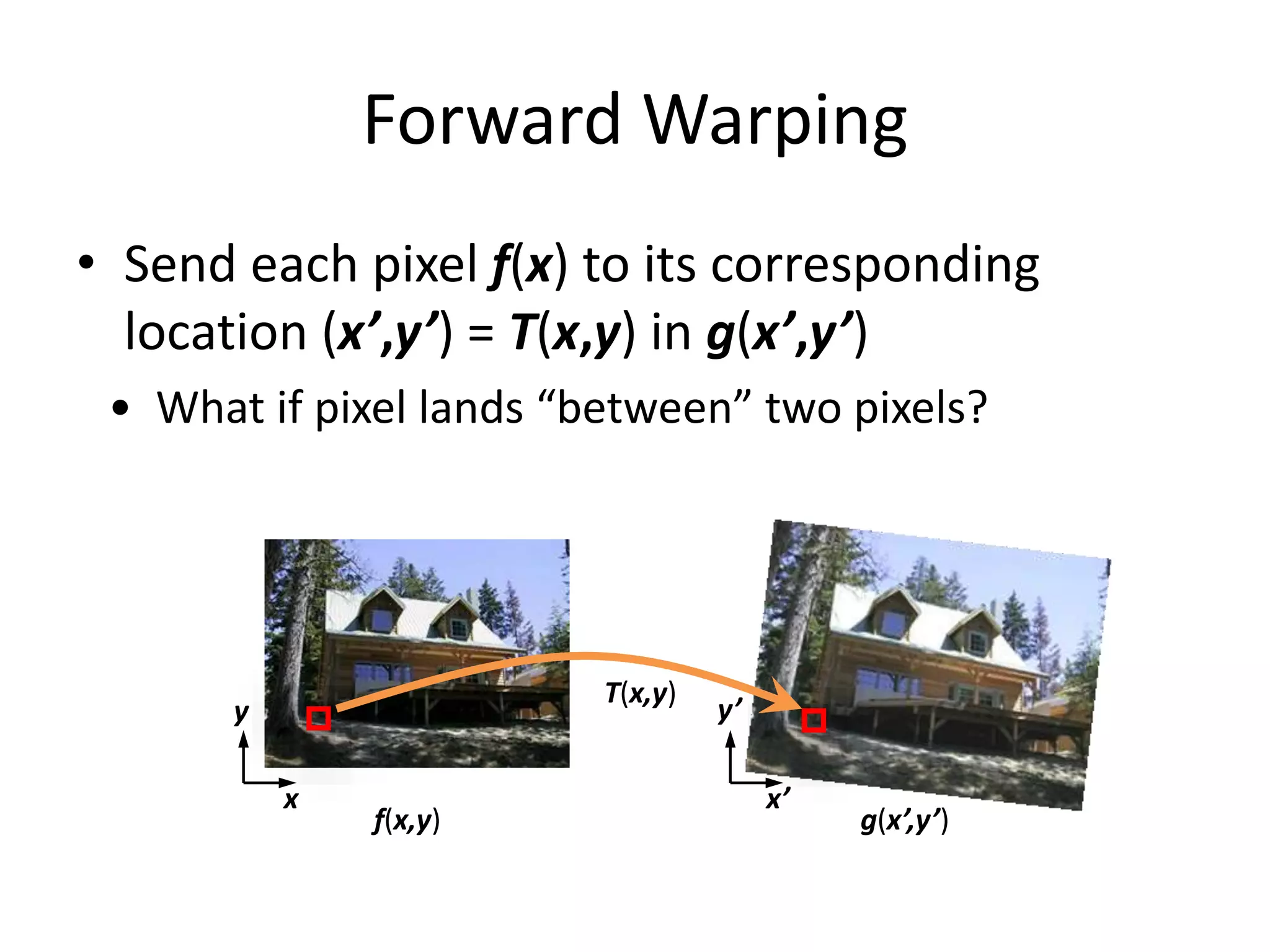
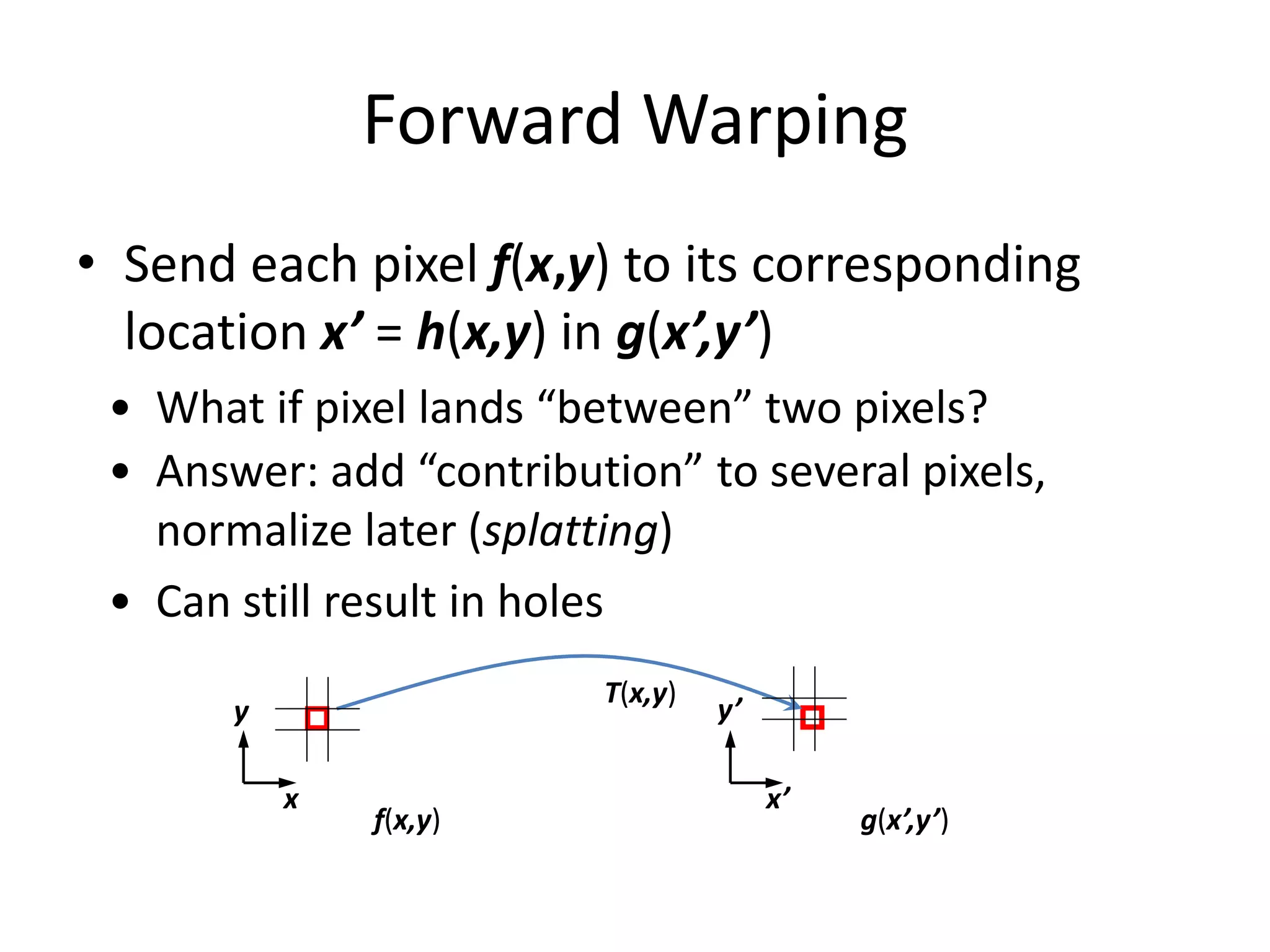

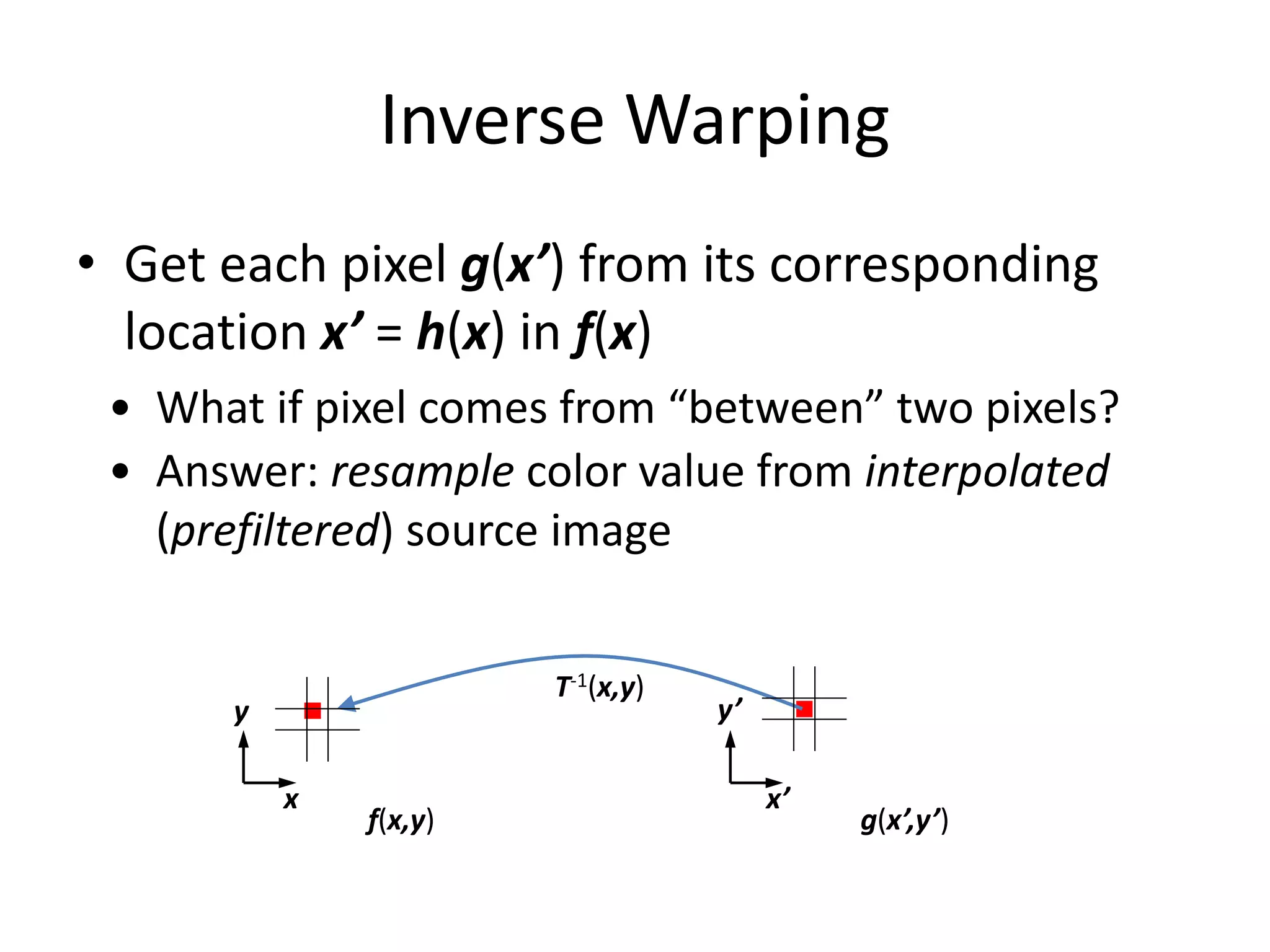
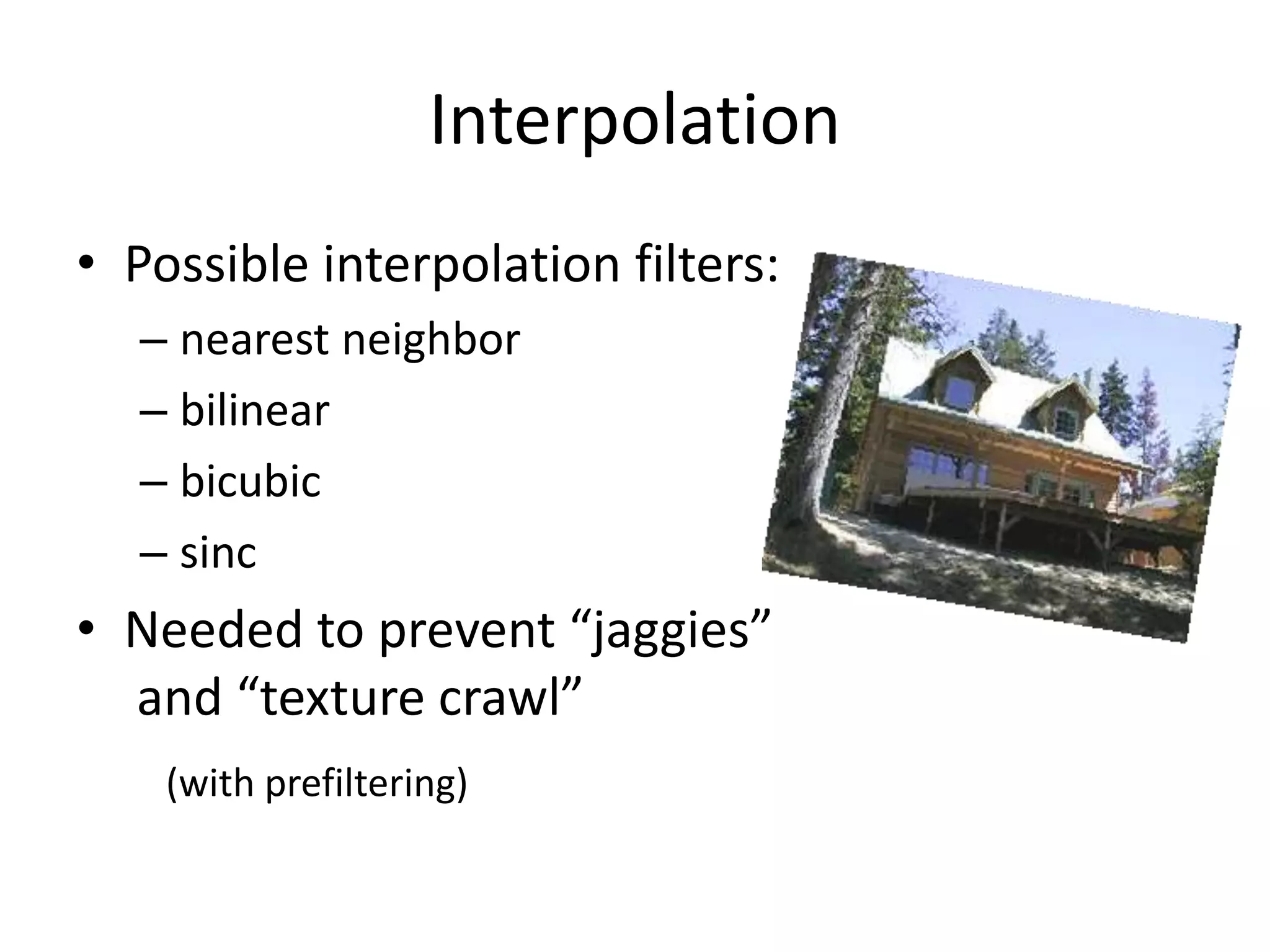


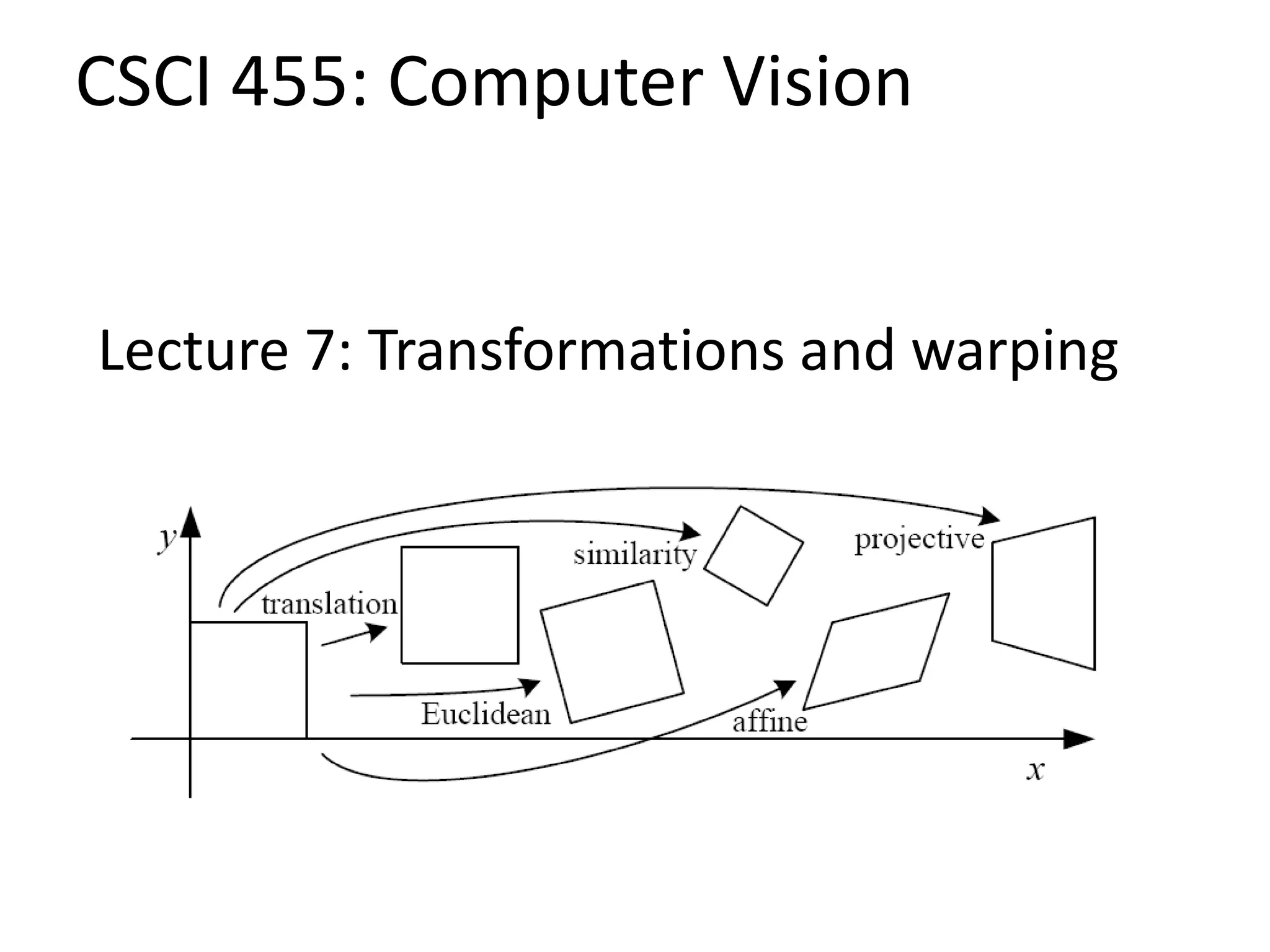
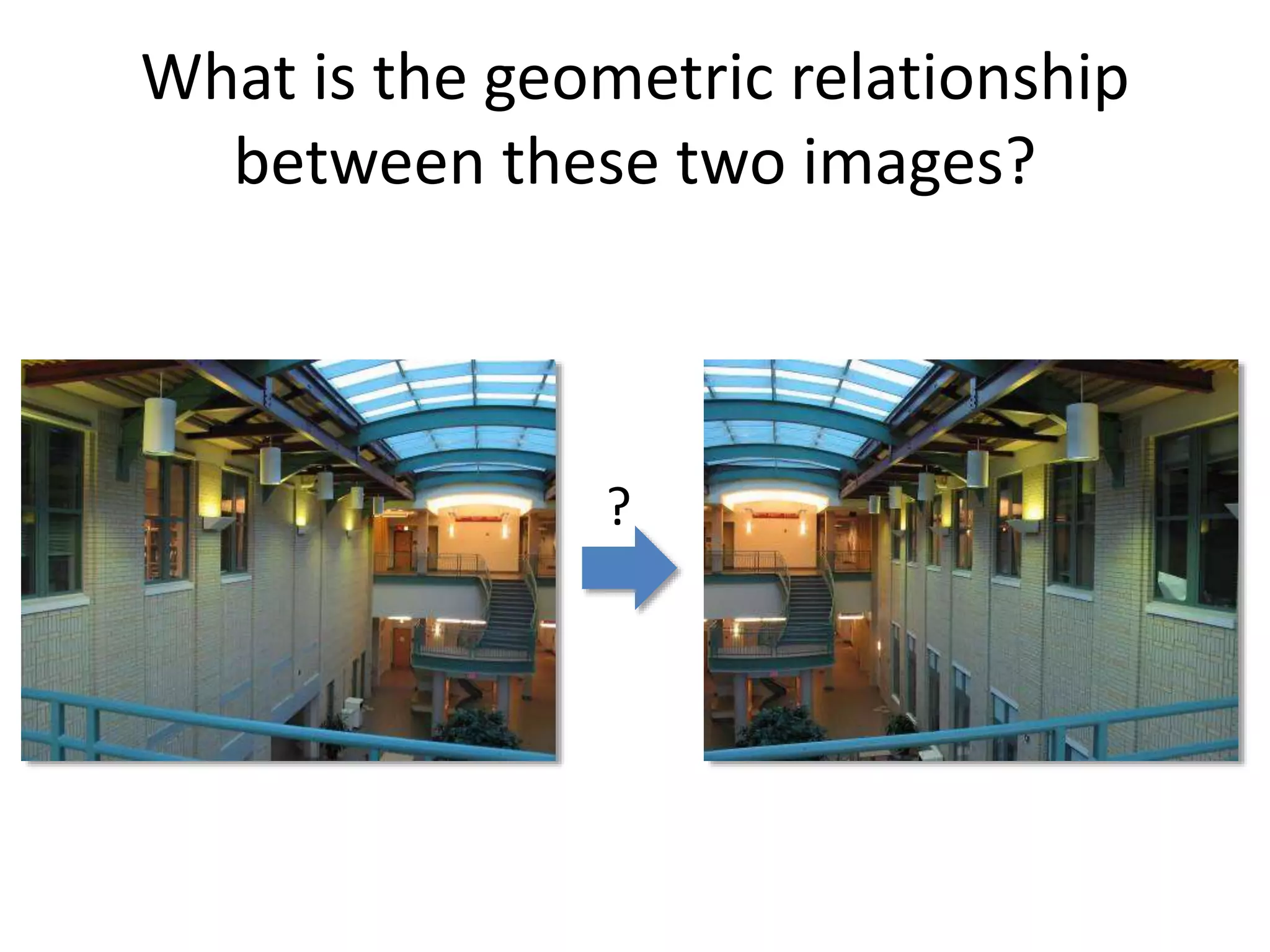
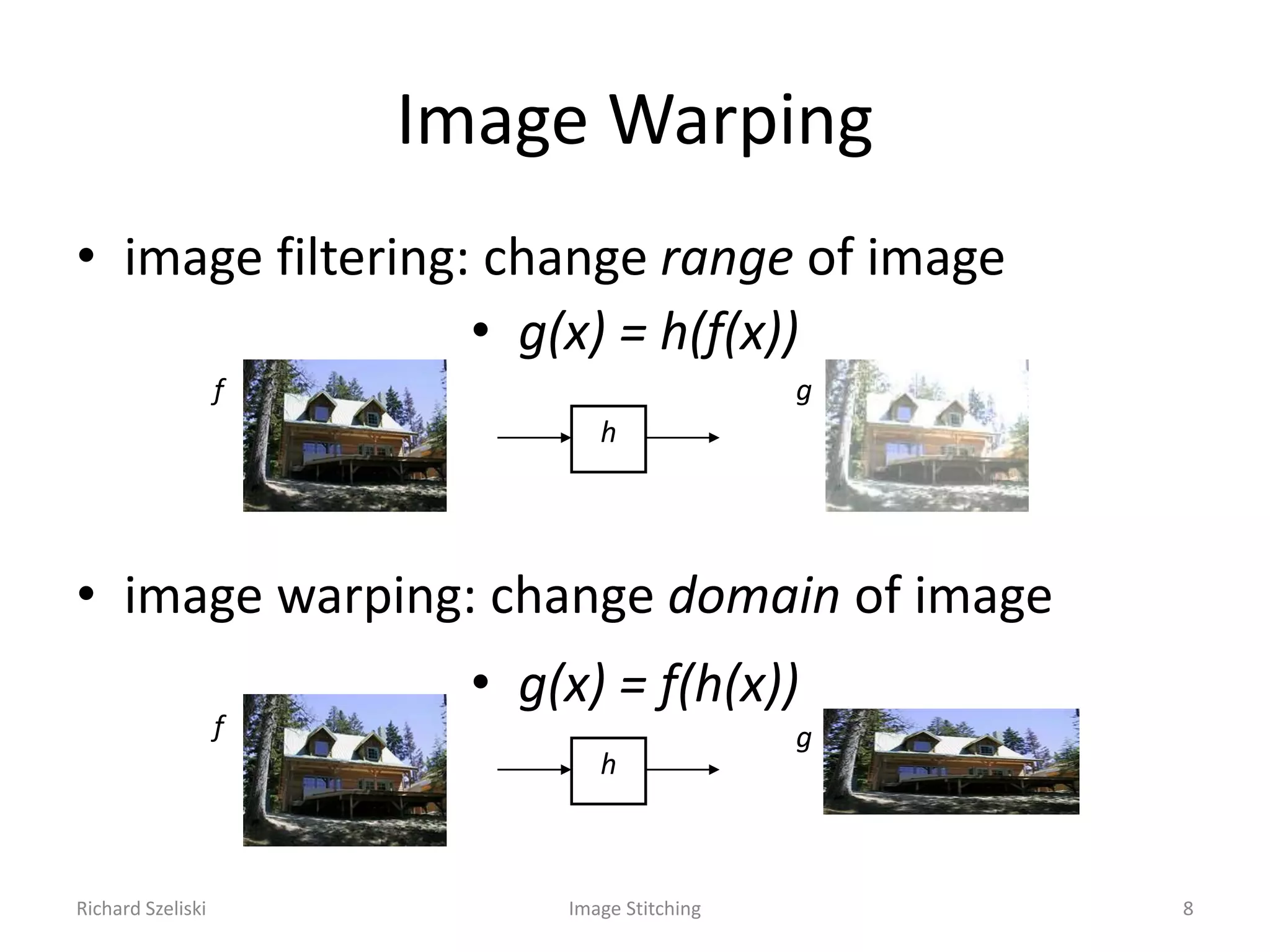
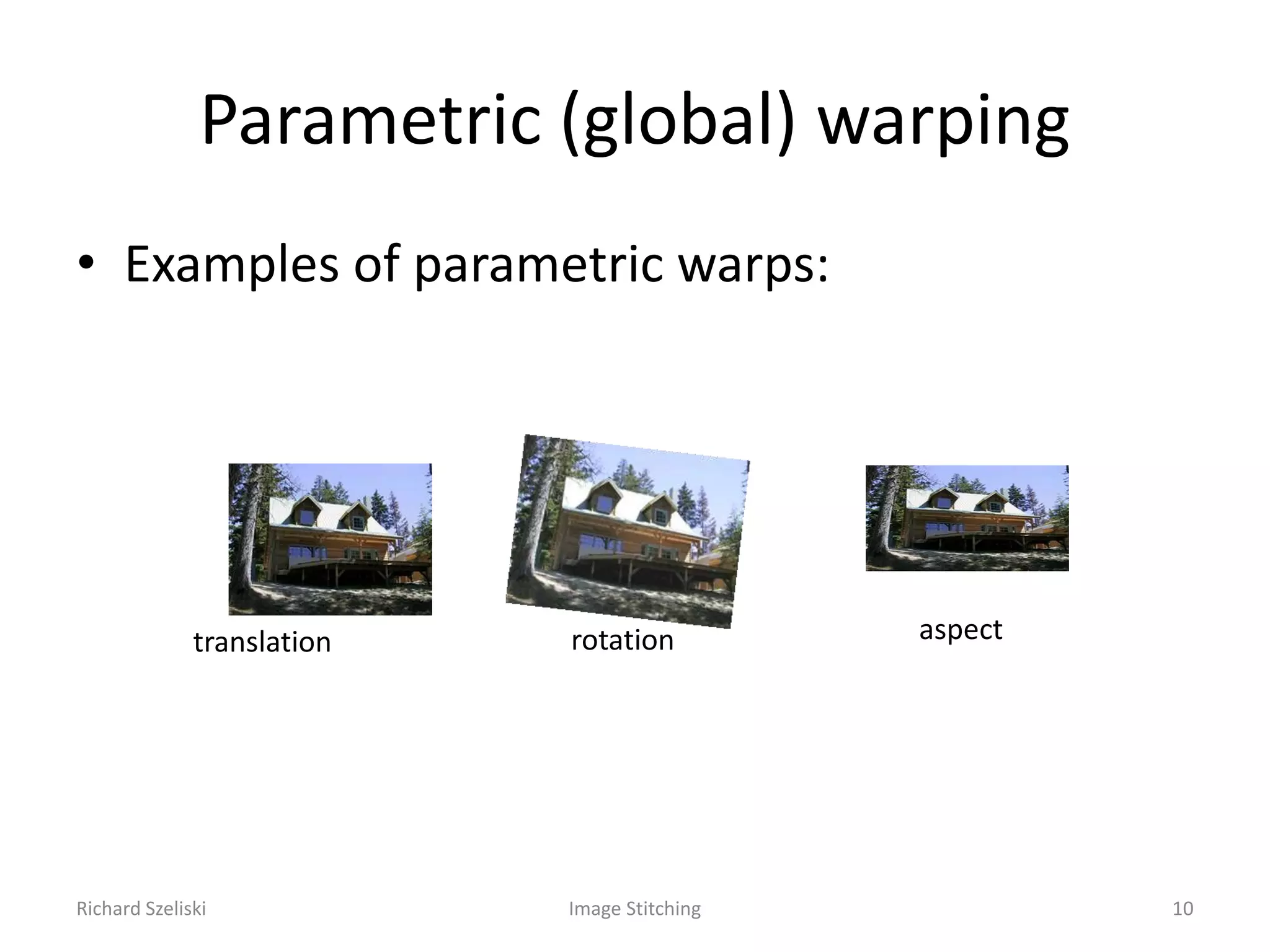
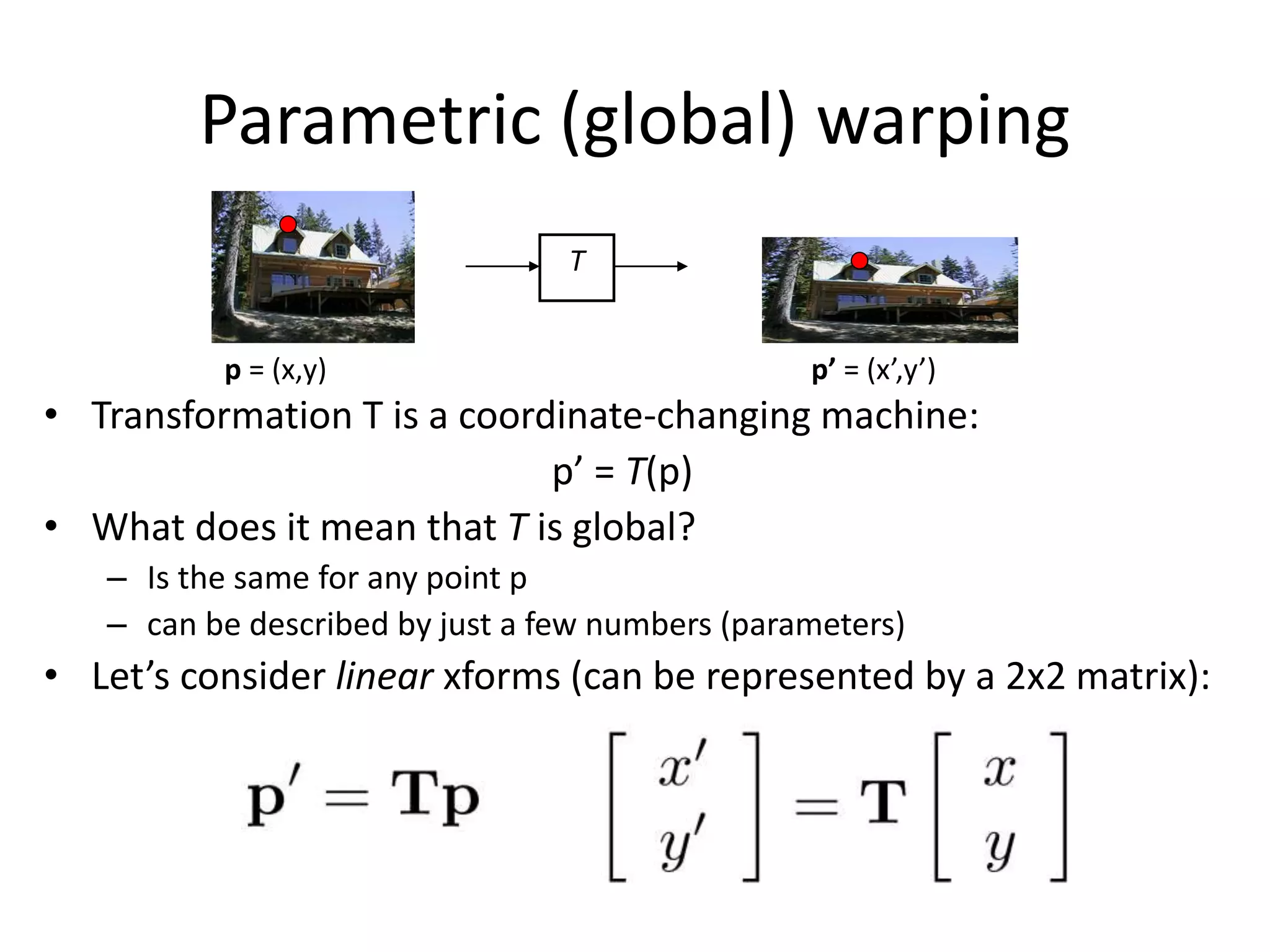
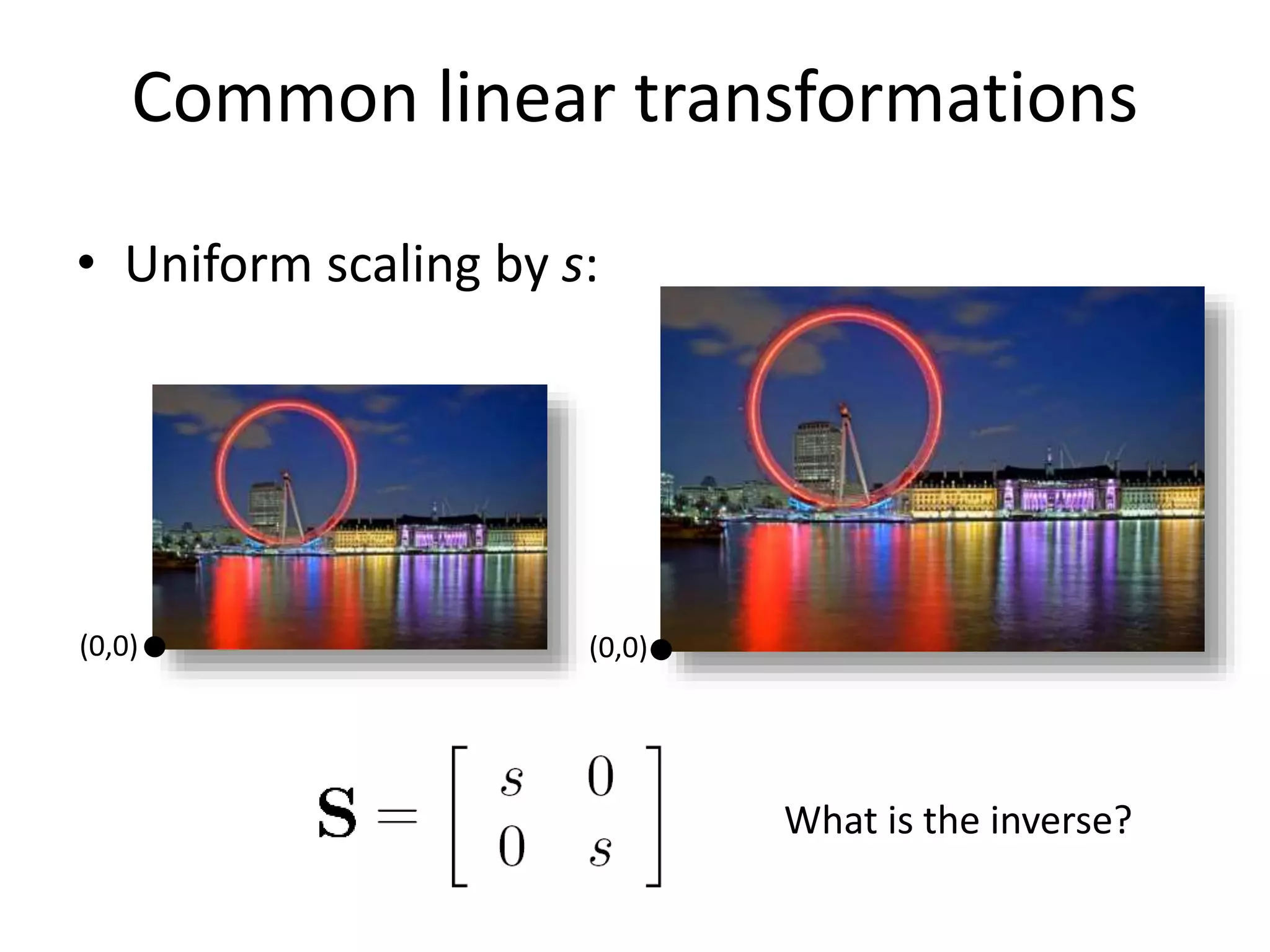
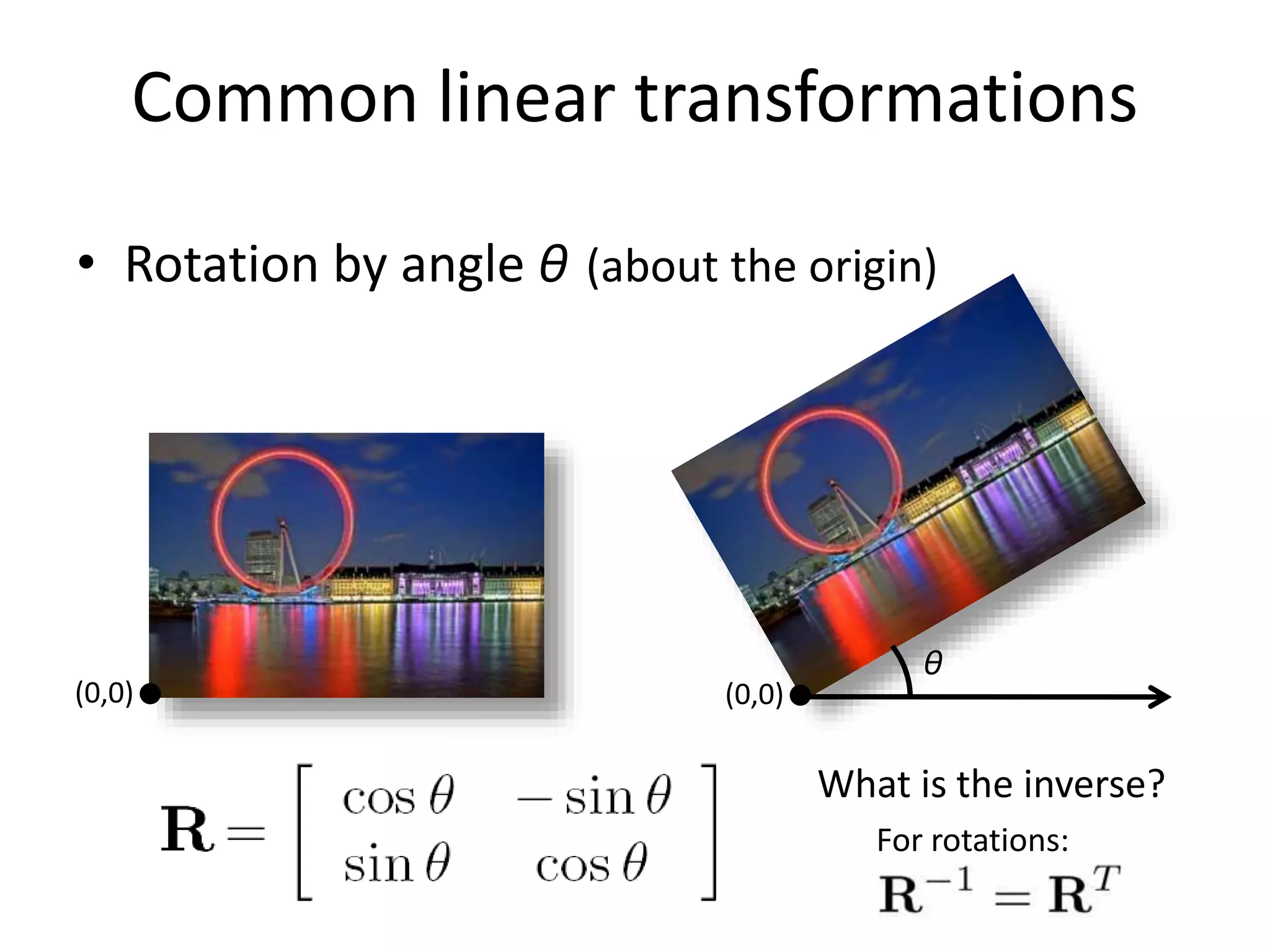
This document summarizes a lecture on image transformations and warping. It discusses: 1) Why image alignment is important for tasks like image mosaicing and what geometric transformations exist, like similarity transformations. 2) The concept of image warping, where the domain (coordinates) of an image are changed, as opposed to filtering, which changes the range (colors). 3) Parametric or global warping methods that apply the same transformation to all points, described by parameters, including linear transformations represented by 2x2 matrices. 4) Homogeneous coordinates as a way to represent translations and other transformations with matrices. 5) Common affine transformations including translation, rotation, scaling, and shear.