Download to read offline
![3
Object Recognition
What is recognition
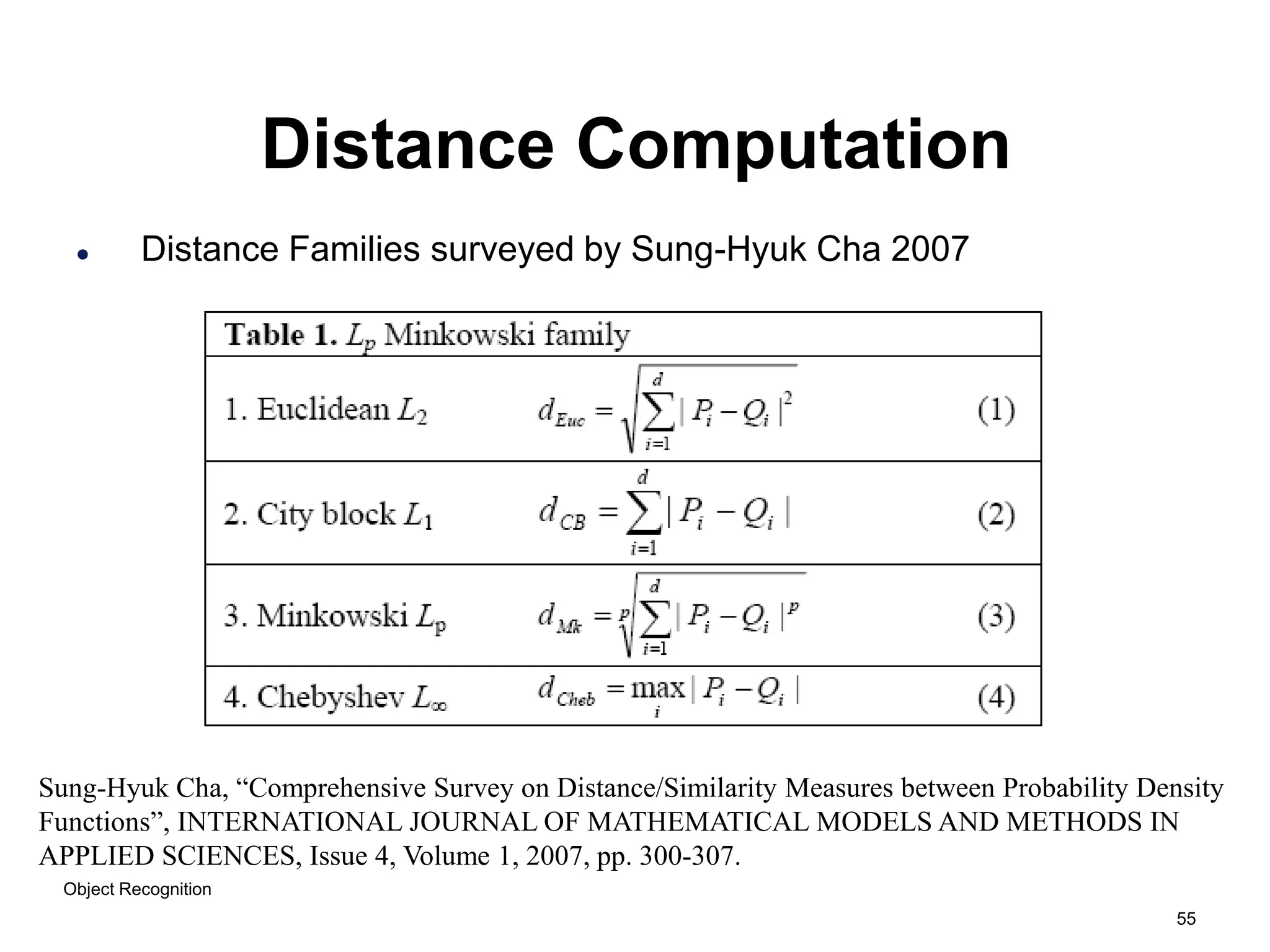
Given a scene (image) and a library of models, Object Recognition is
trying to answer the following questions:
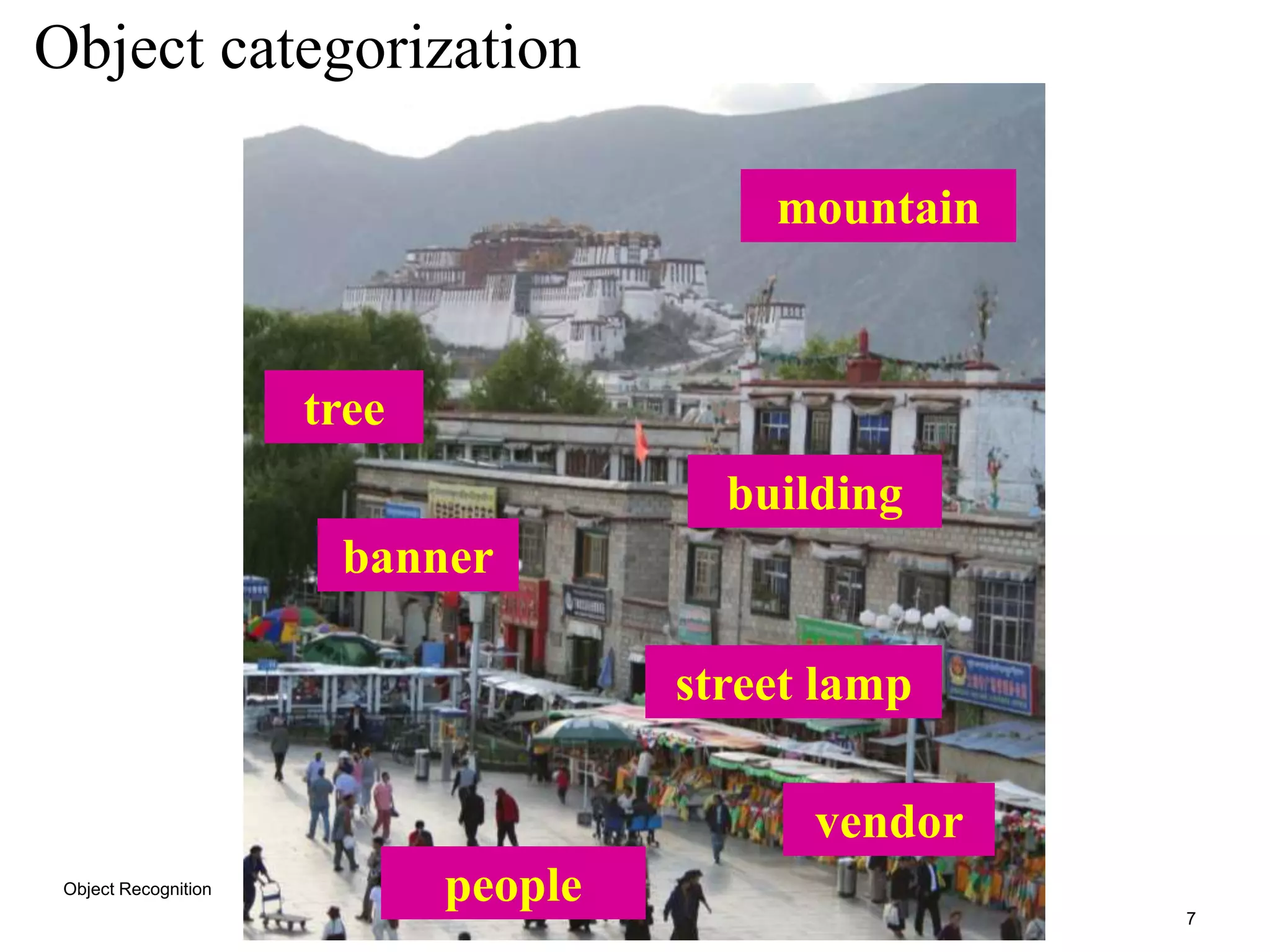
• What objects are we looking at? (n-objects X m-models)
• Are they bottles, cars, kings? And where are they in the scene?
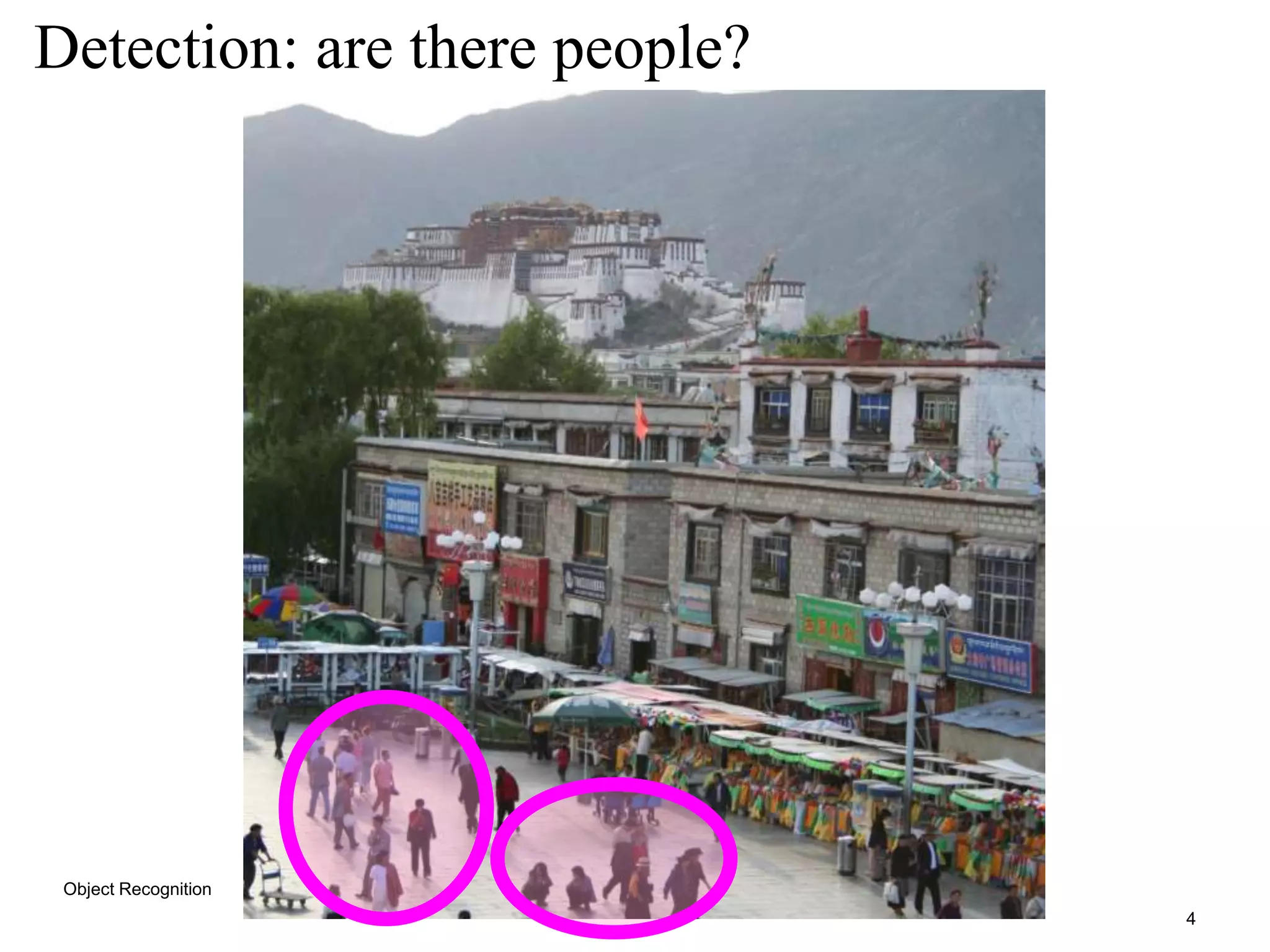
• We want to identify all objects in view. [Object Detection]
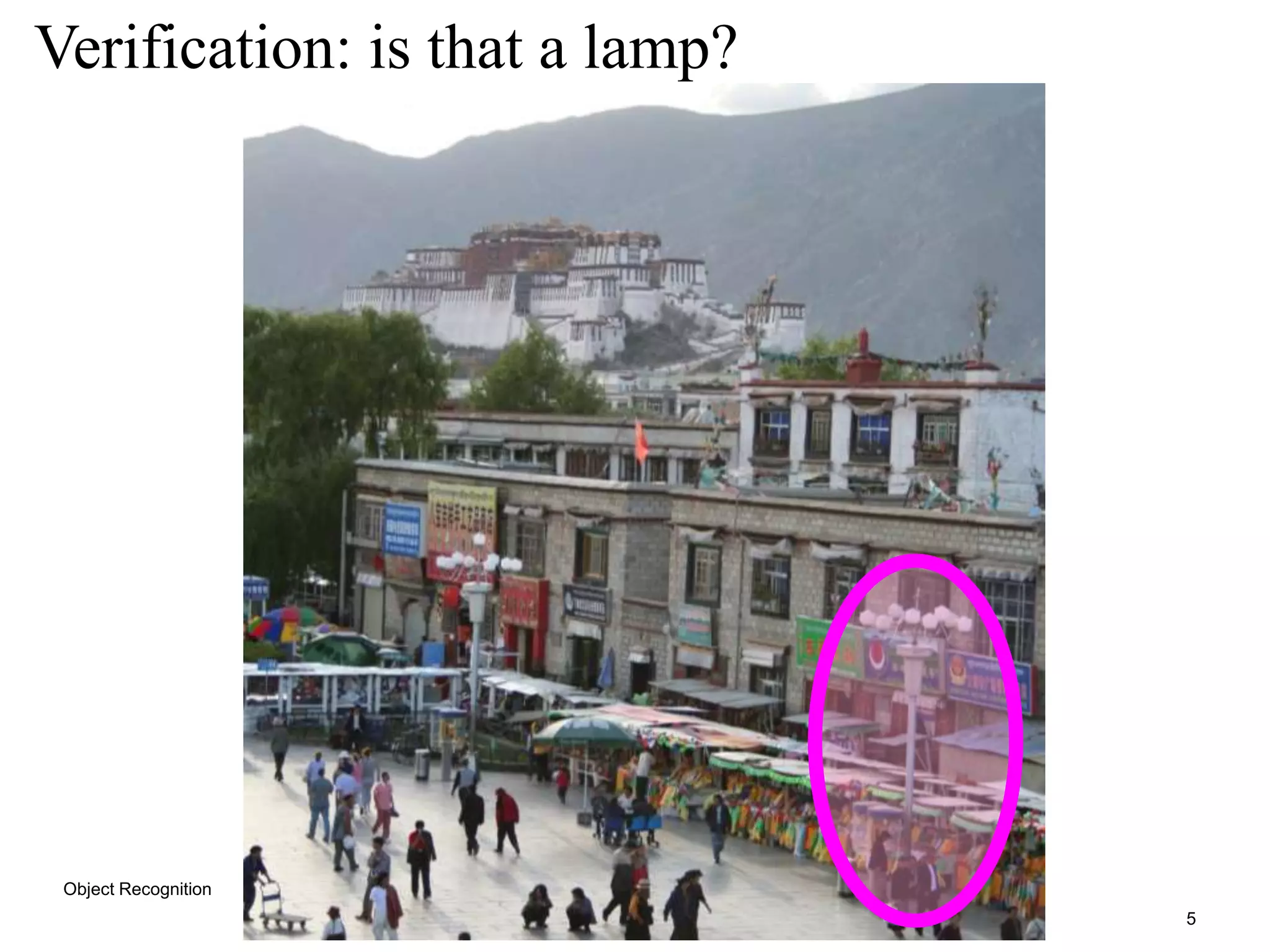
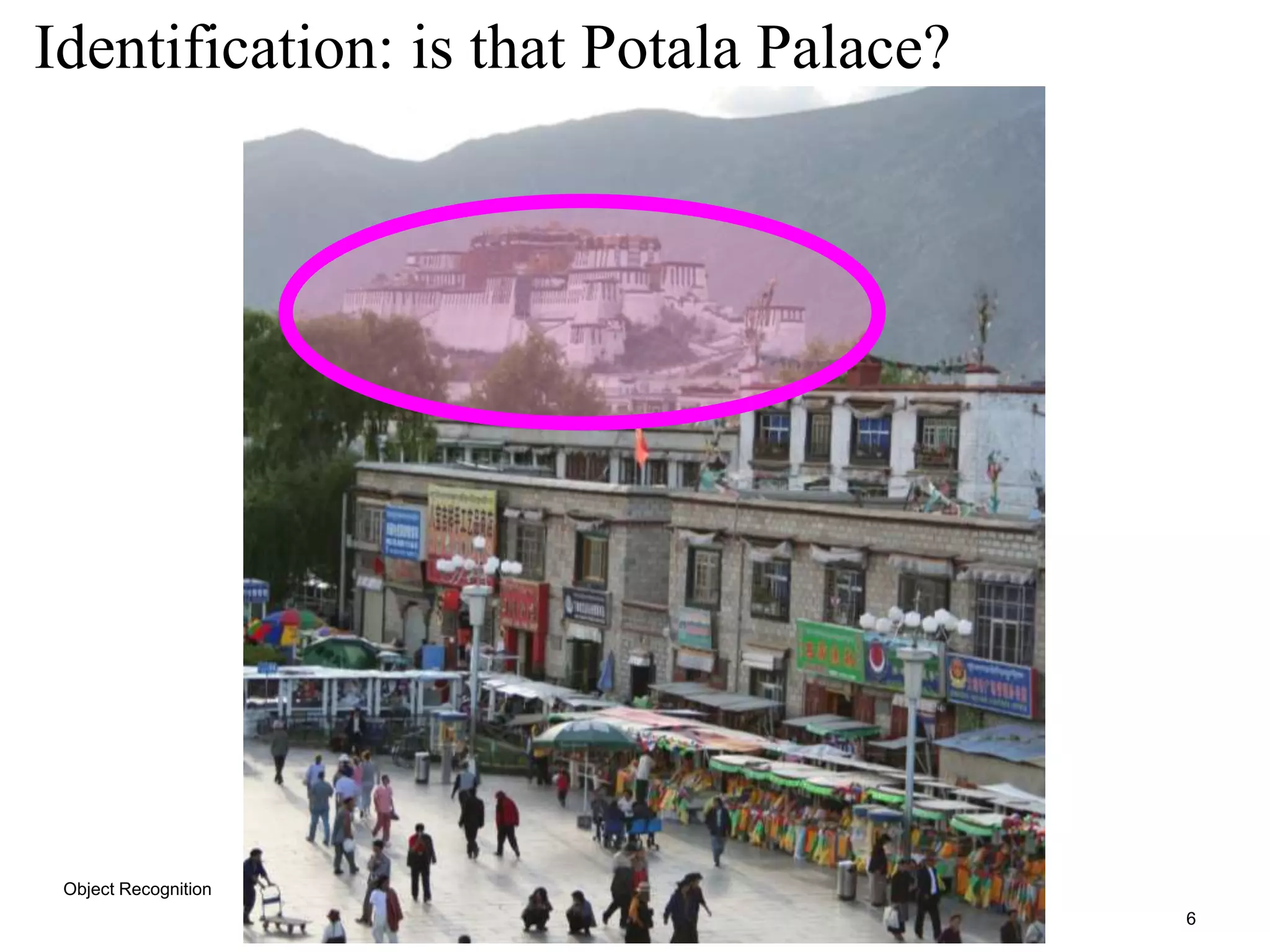
• Is this part of the scene an instance of model X? (1-object X 1-model)
• We have a model X and we are trying to match it to a precise part of the
scene. [Object Verification]
• What is this part of the scene? (1-object X m-models)
• We want to determine the identity of a part of the scene.
• Are there any instances of model X in the scene? (n-object X 1-model)
• We picked a model X and we are trying to find instances of it in the whole
scene.
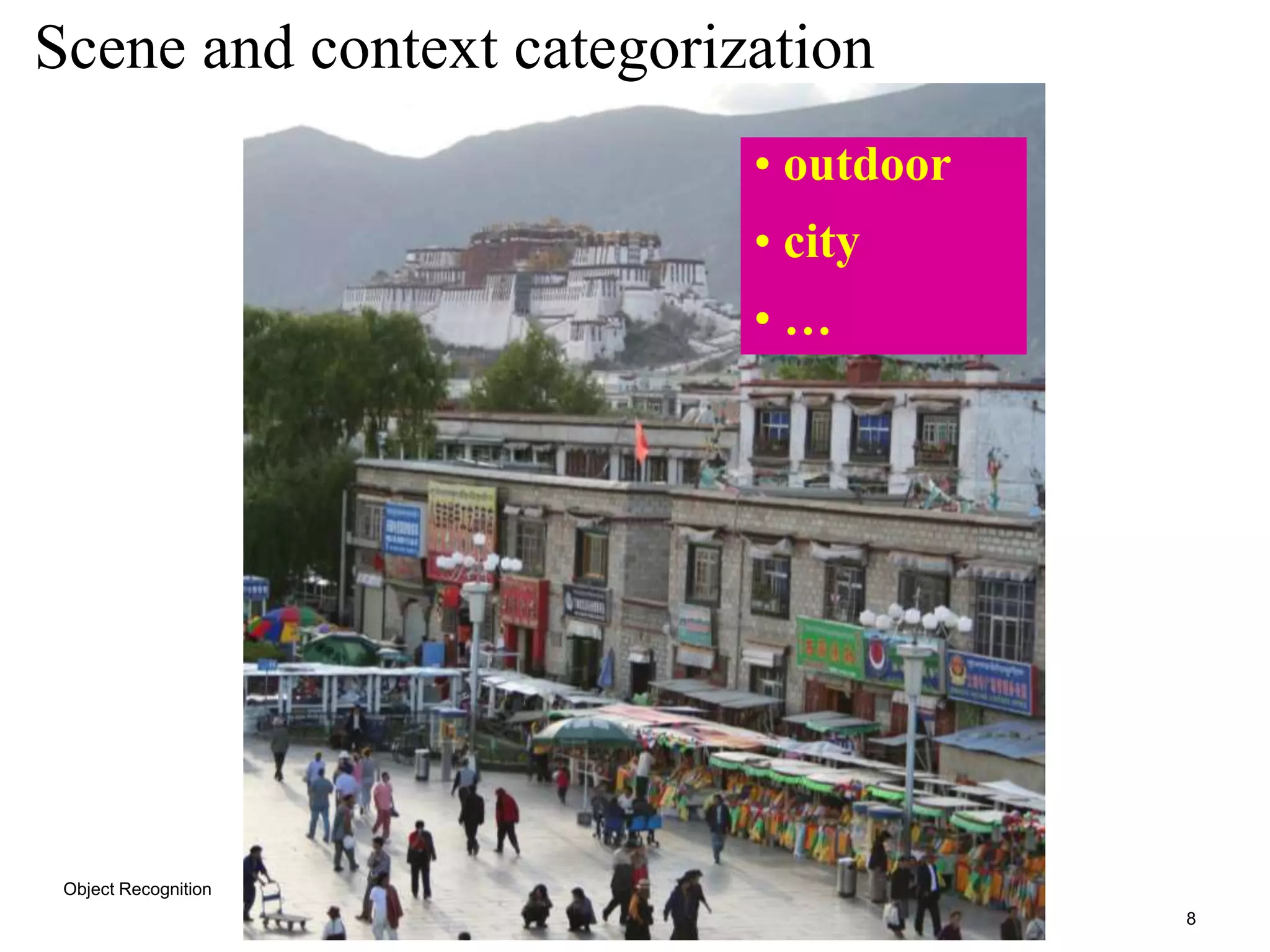
• Also object, scene, and context categorization
Note that Face, gesture and activity recognition falls under the above
scenarios too.](https://image.slidesharecdn.com/12cie552objectrecognition-200321061054/75/12-cie552-object_recognition-3-2048.jpg)



![42
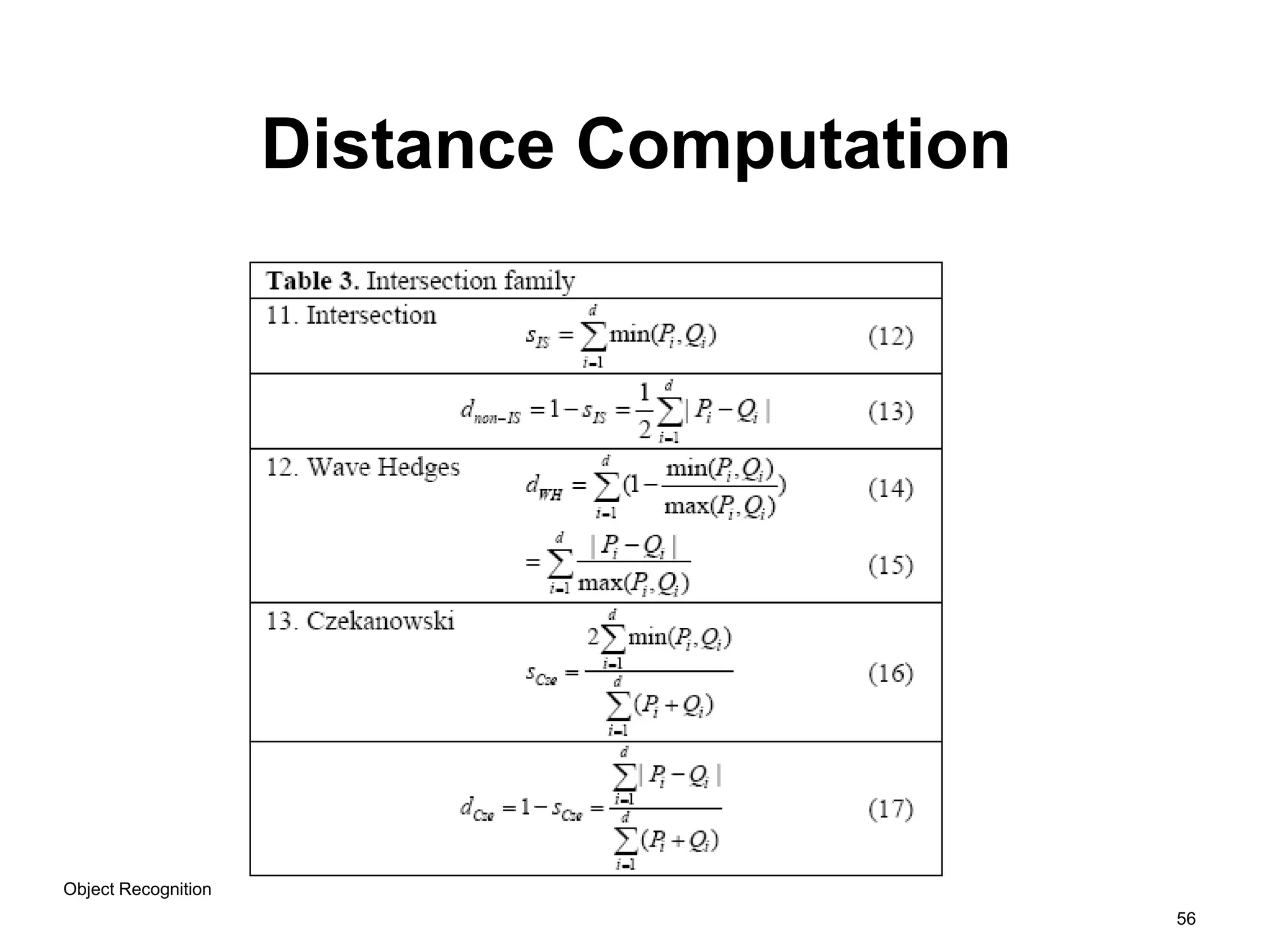
Normalize
patch
Detect patches
[Mikojaczyk and Schmid ’02]
[Mata, Chum, Urban & Pajdla, ’02]
[Sivic & Zisserman, ’03]
Compute
SIFT
descriptor
[Lowe’99]
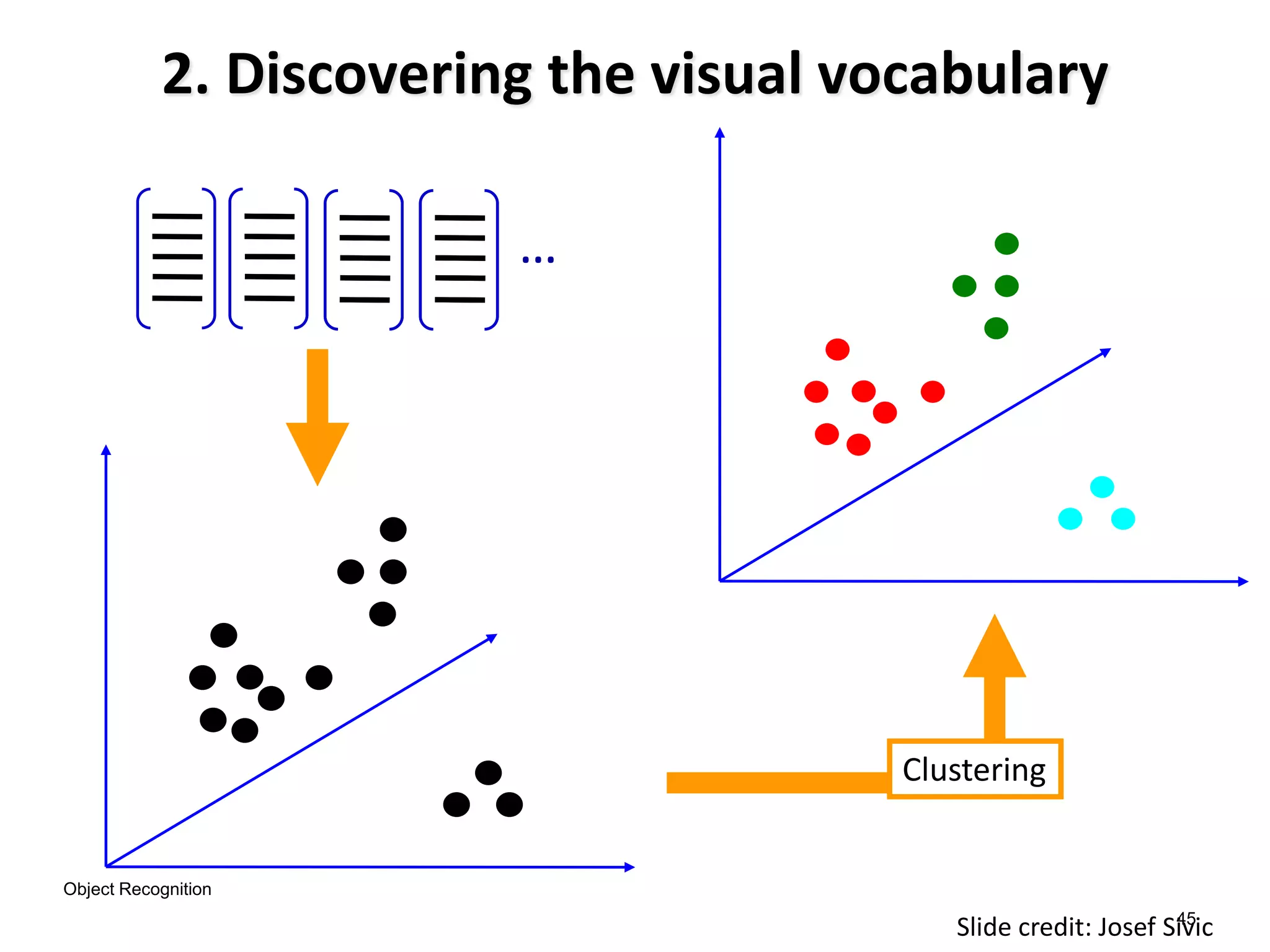
Slide credit: Josef Sivic
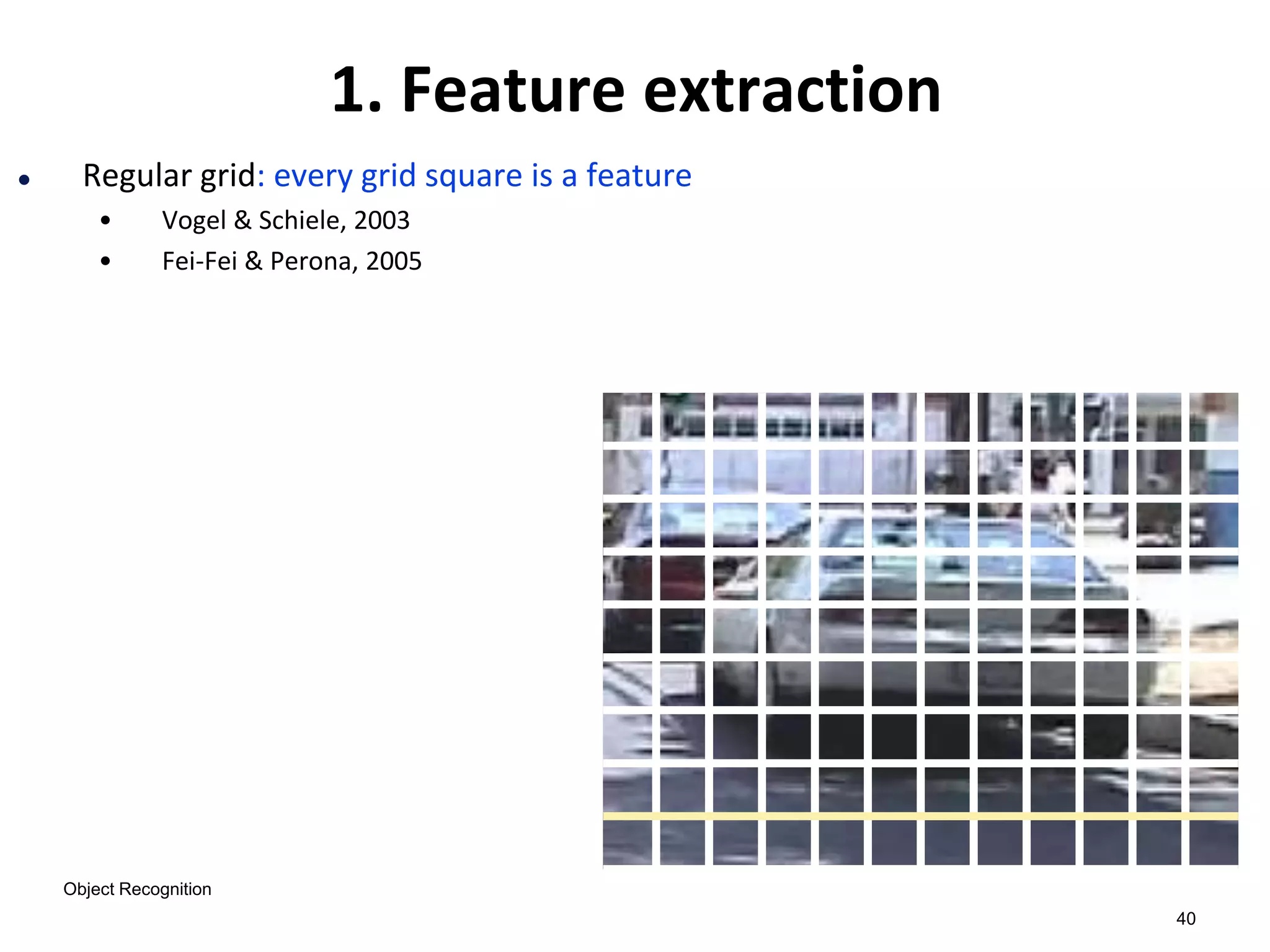
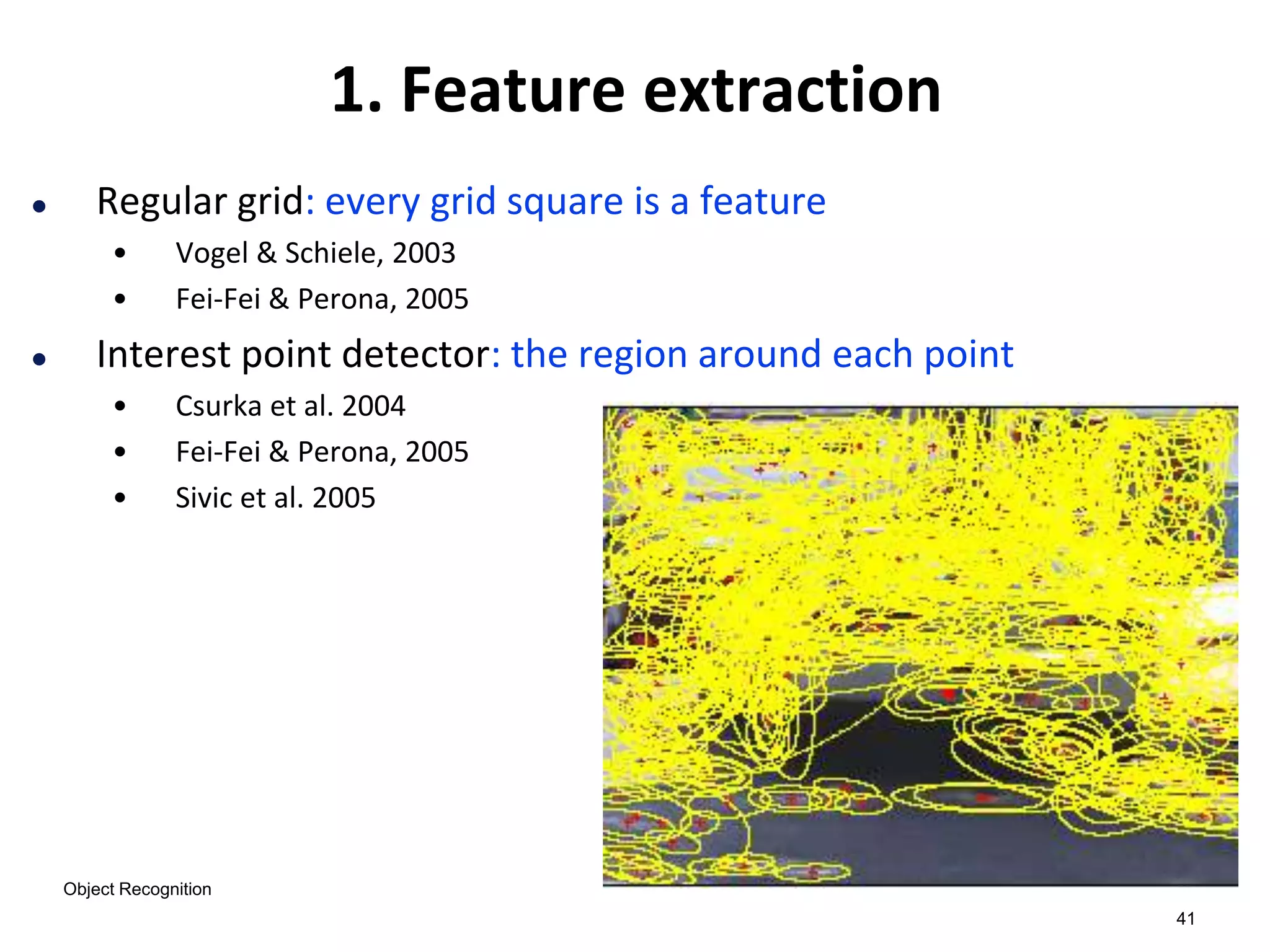
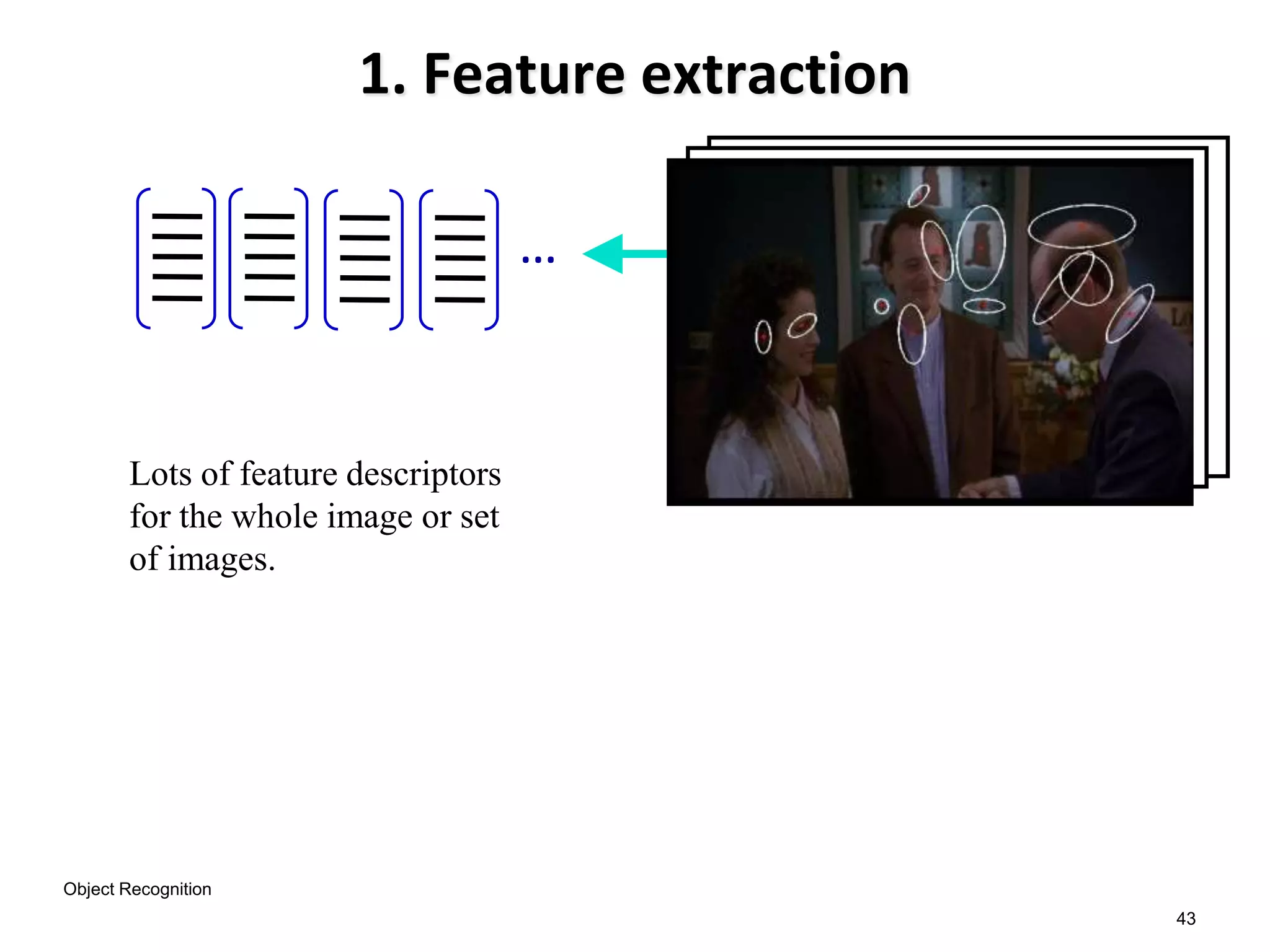
1. Feature extraction
1
23
Object Recognition](https://image.slidesharecdn.com/12cie552objectrecognition-200321061054/75/12-cie552-object_recognition-42-2048.jpg)

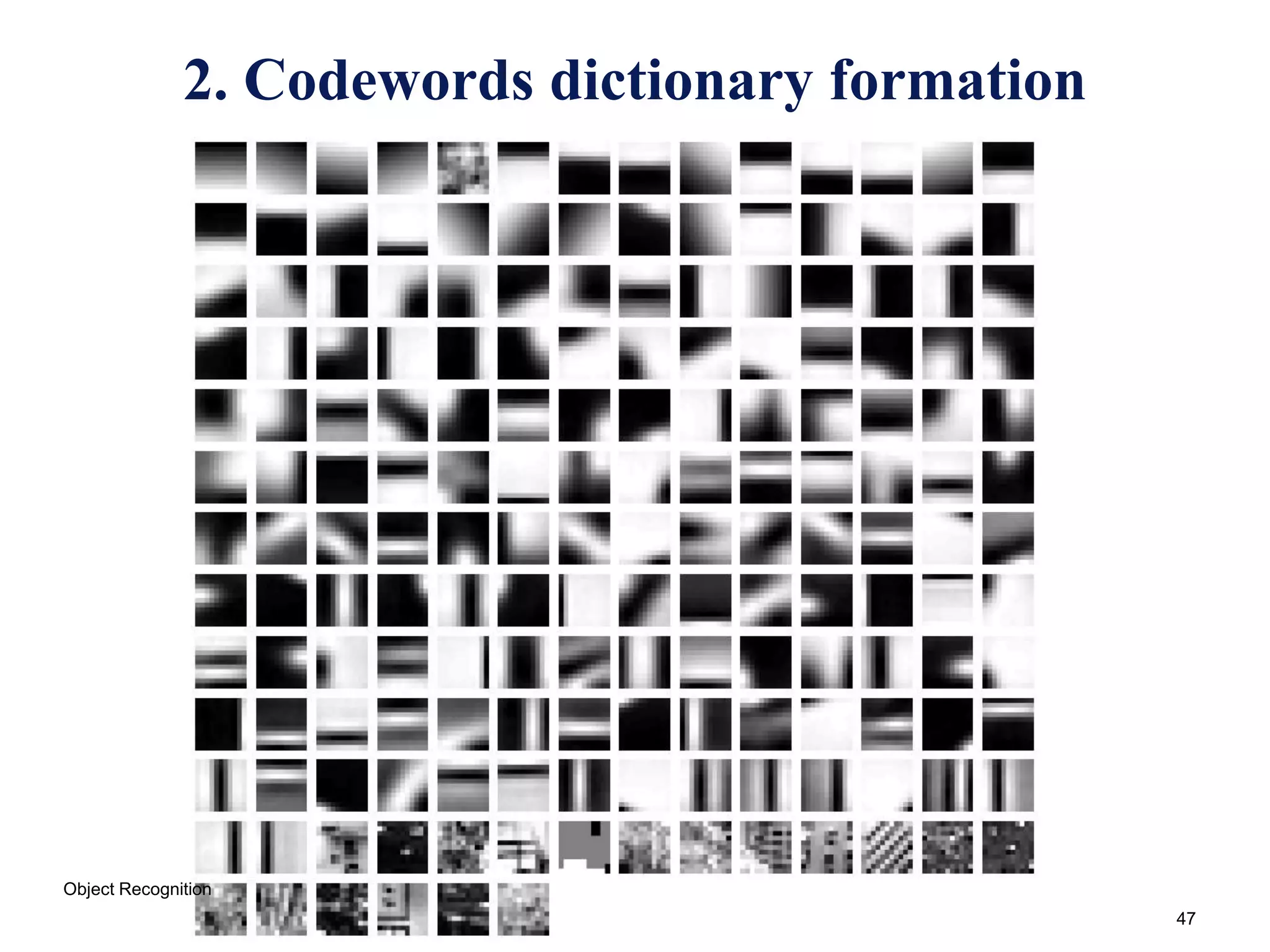
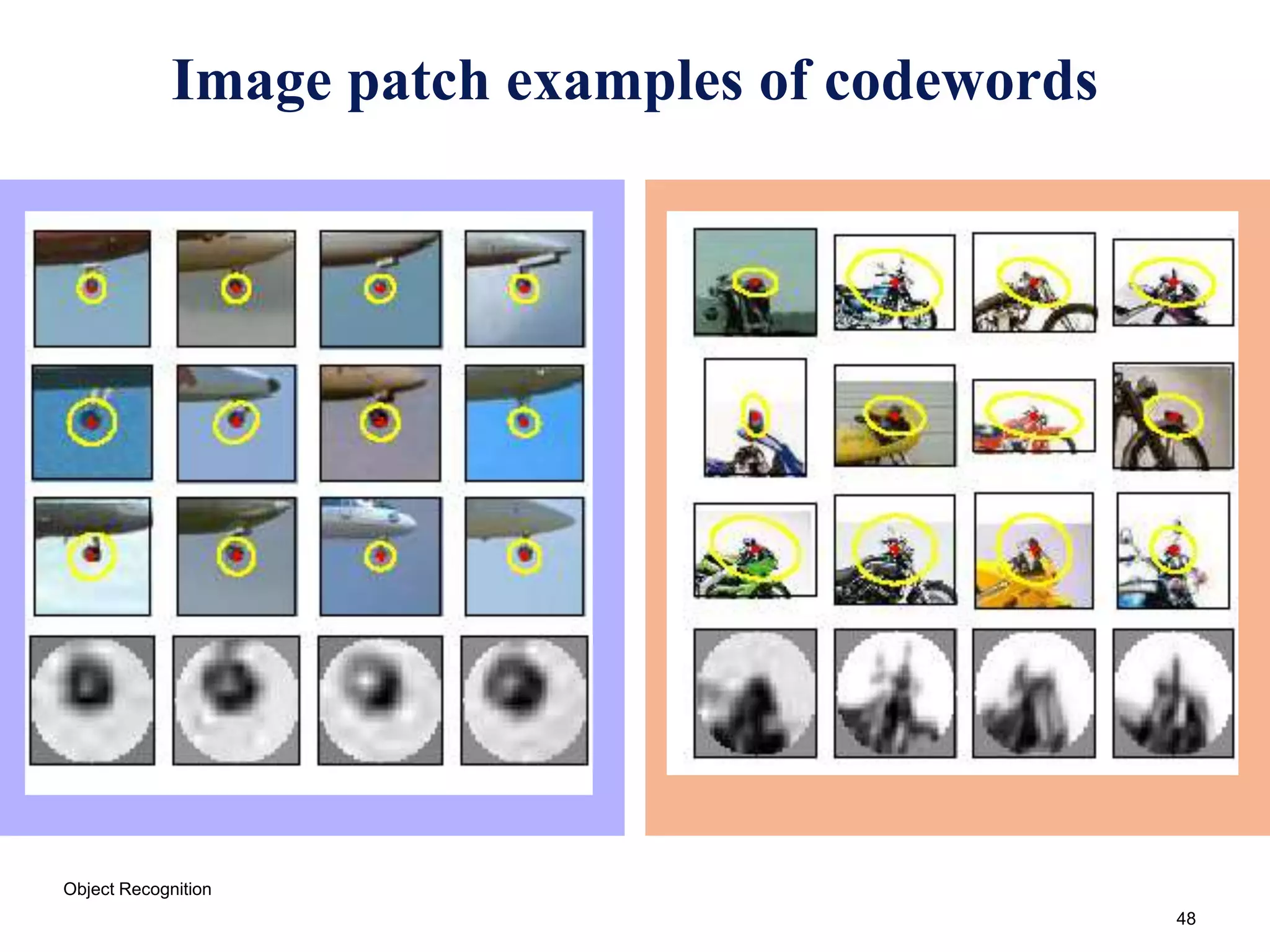
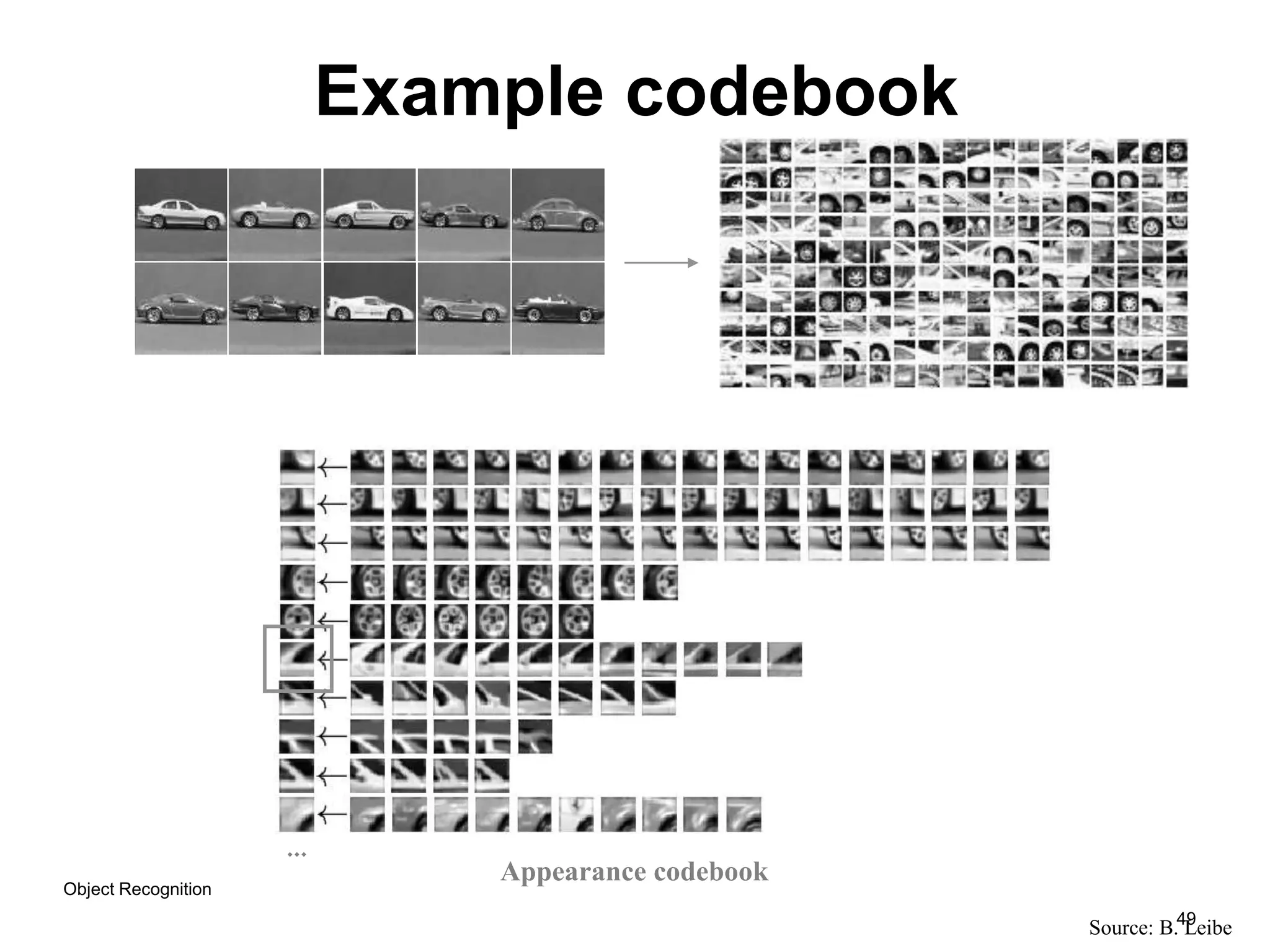
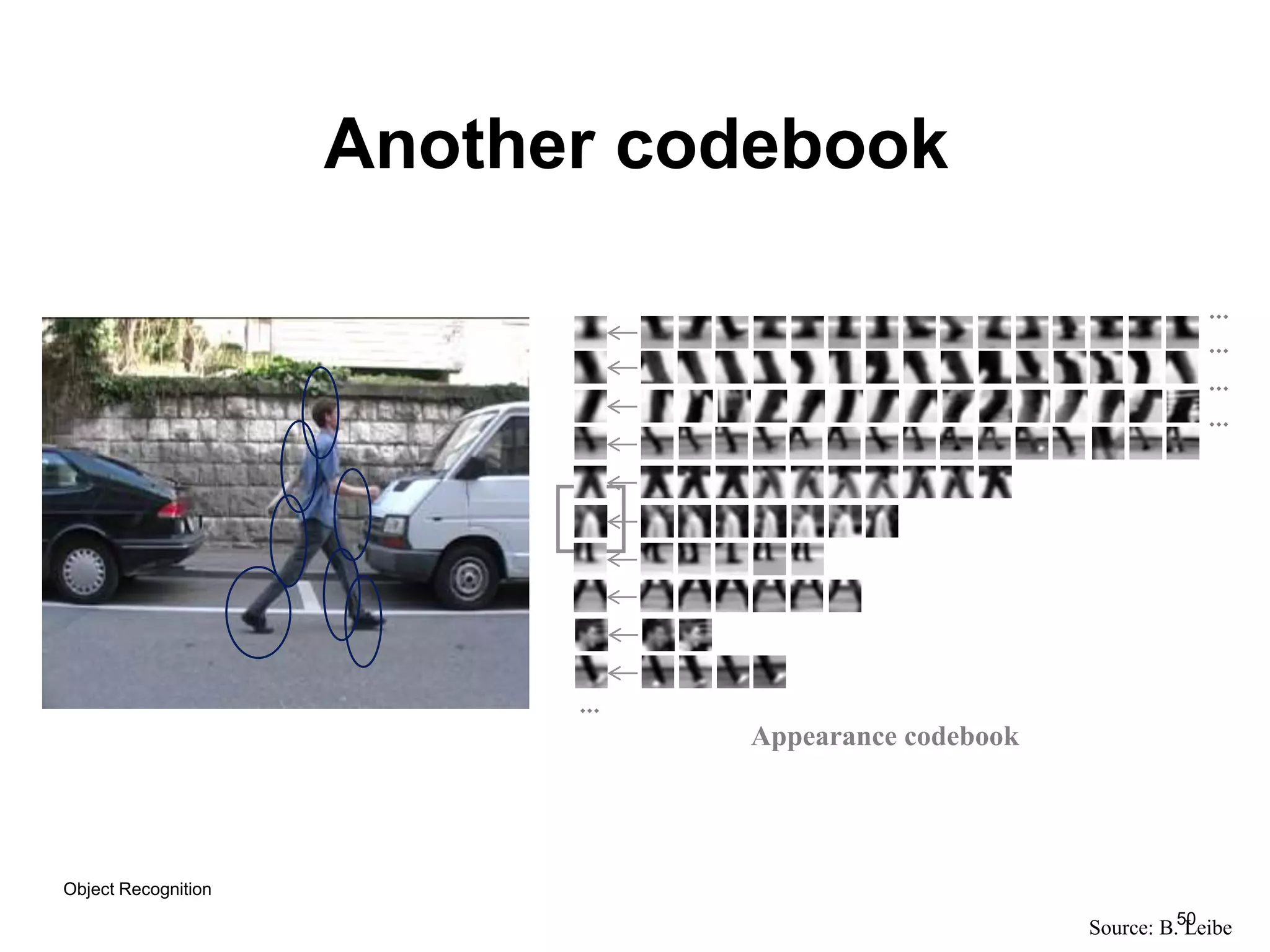
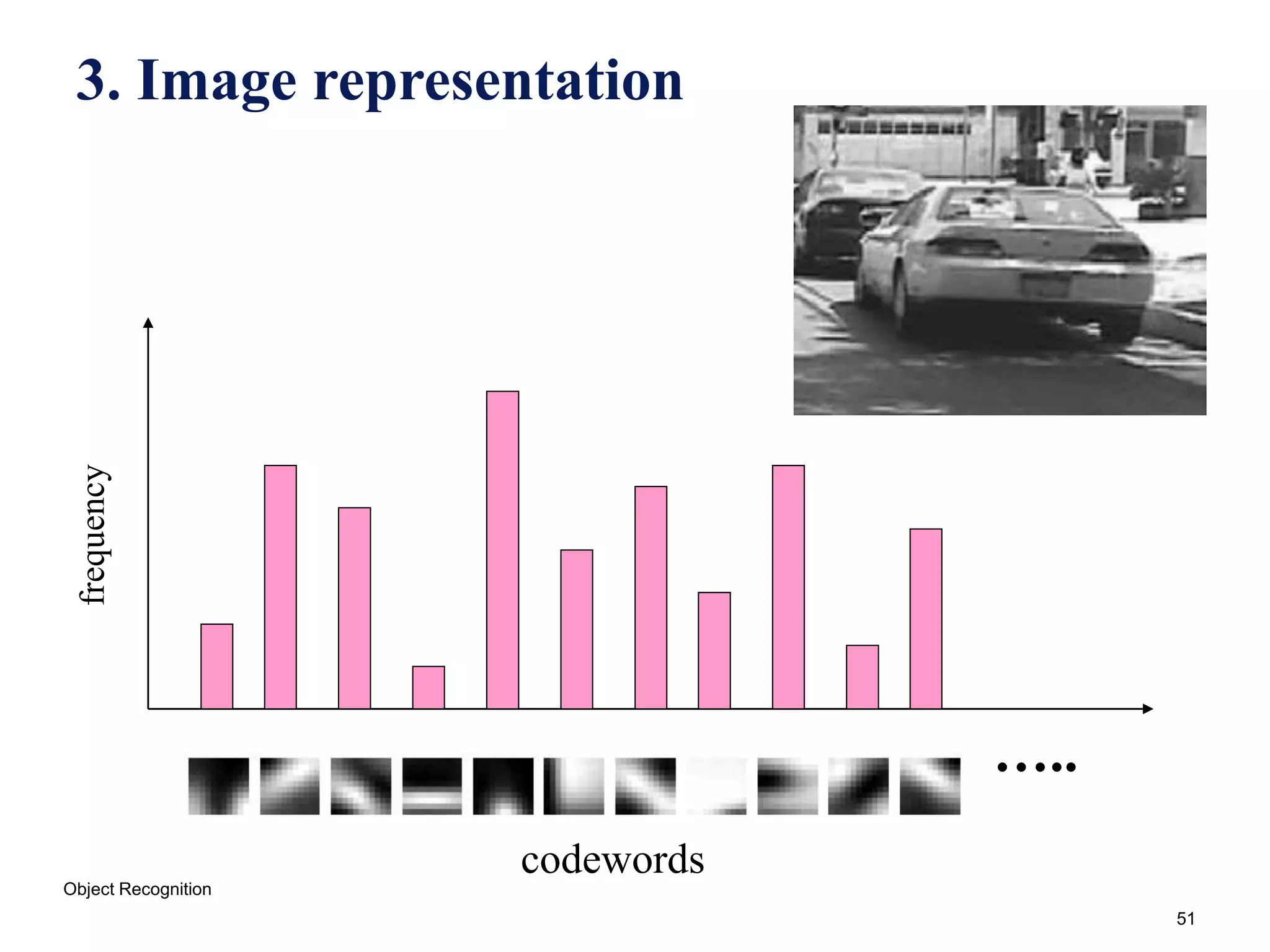
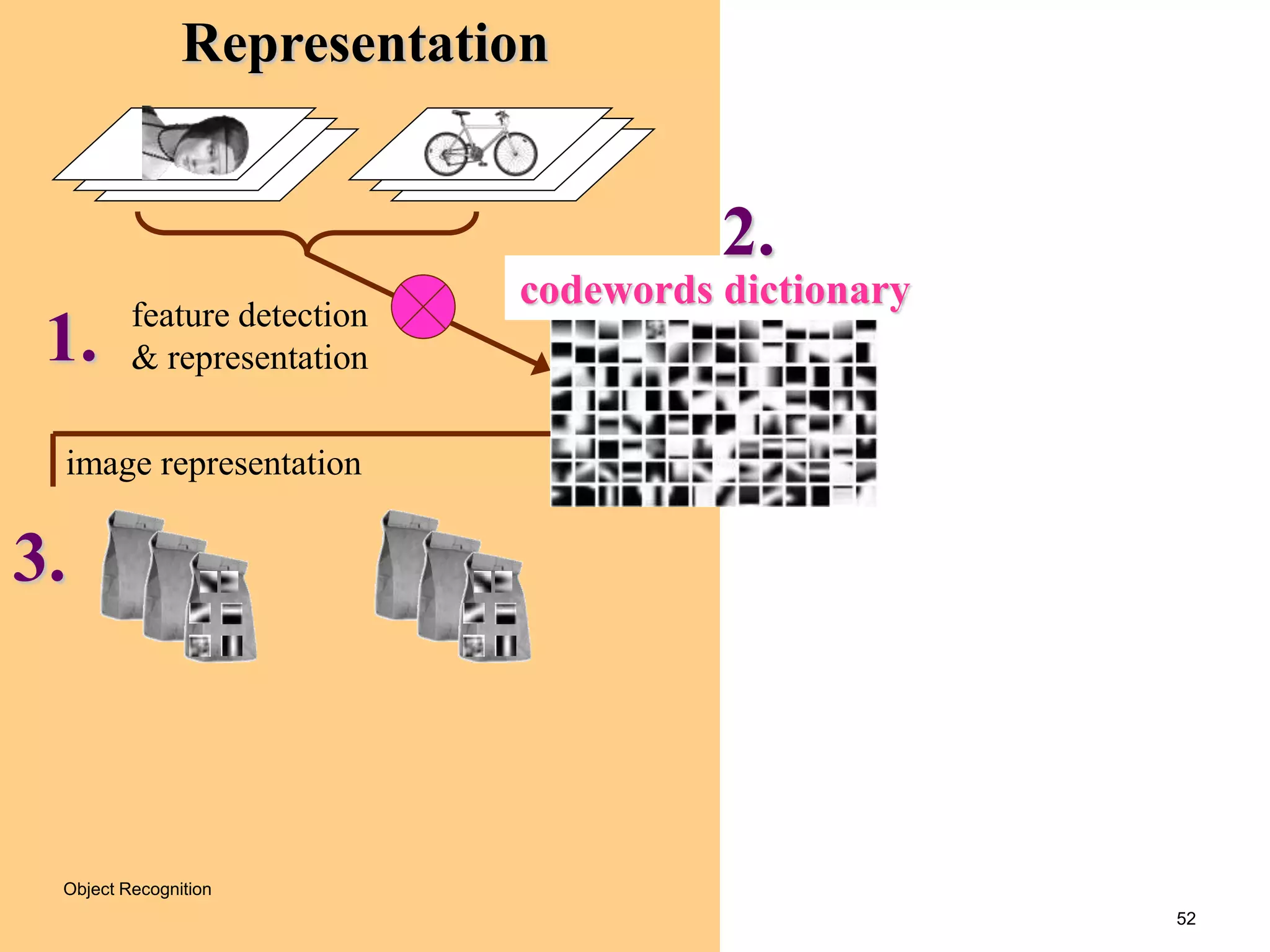
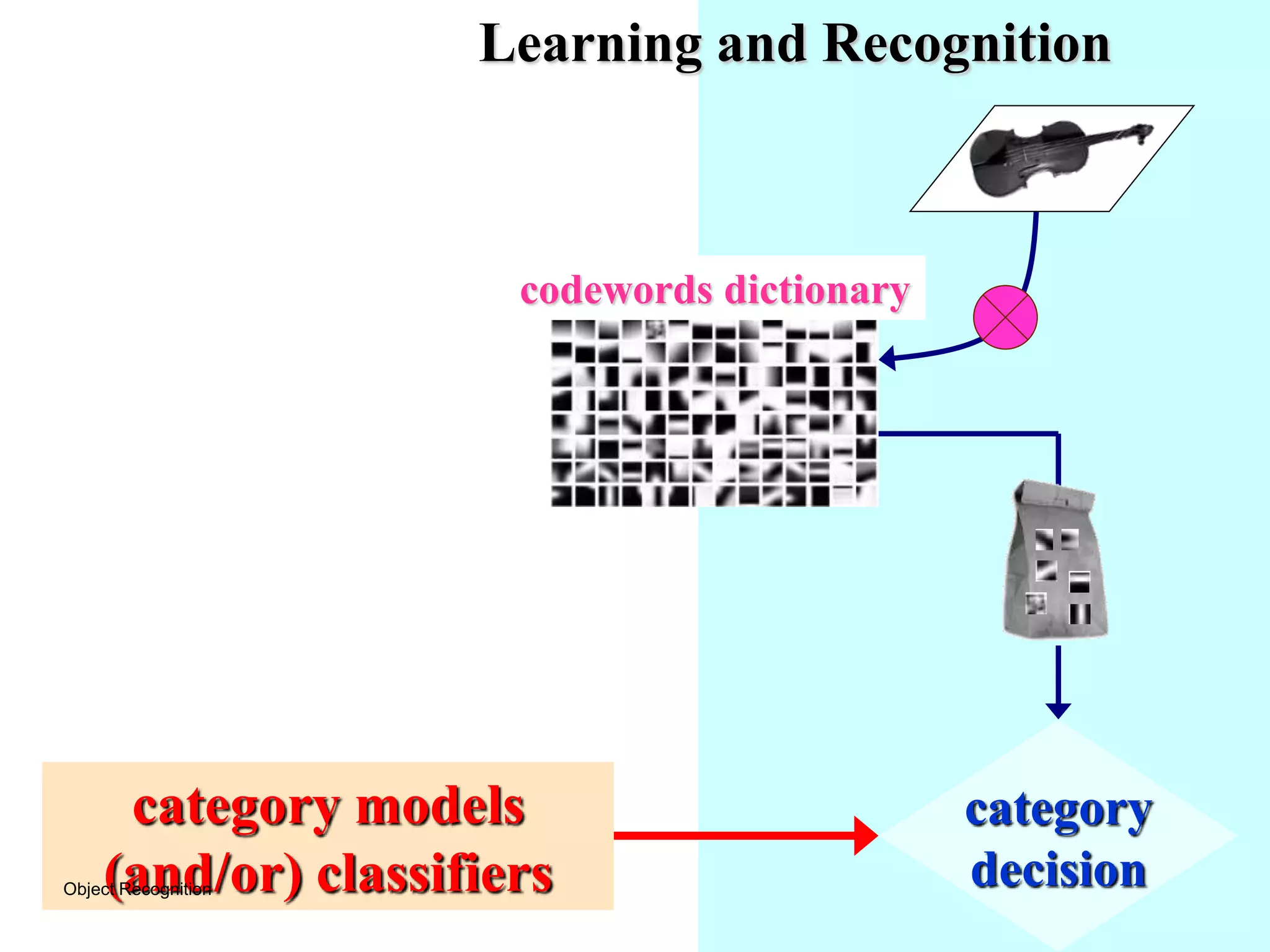
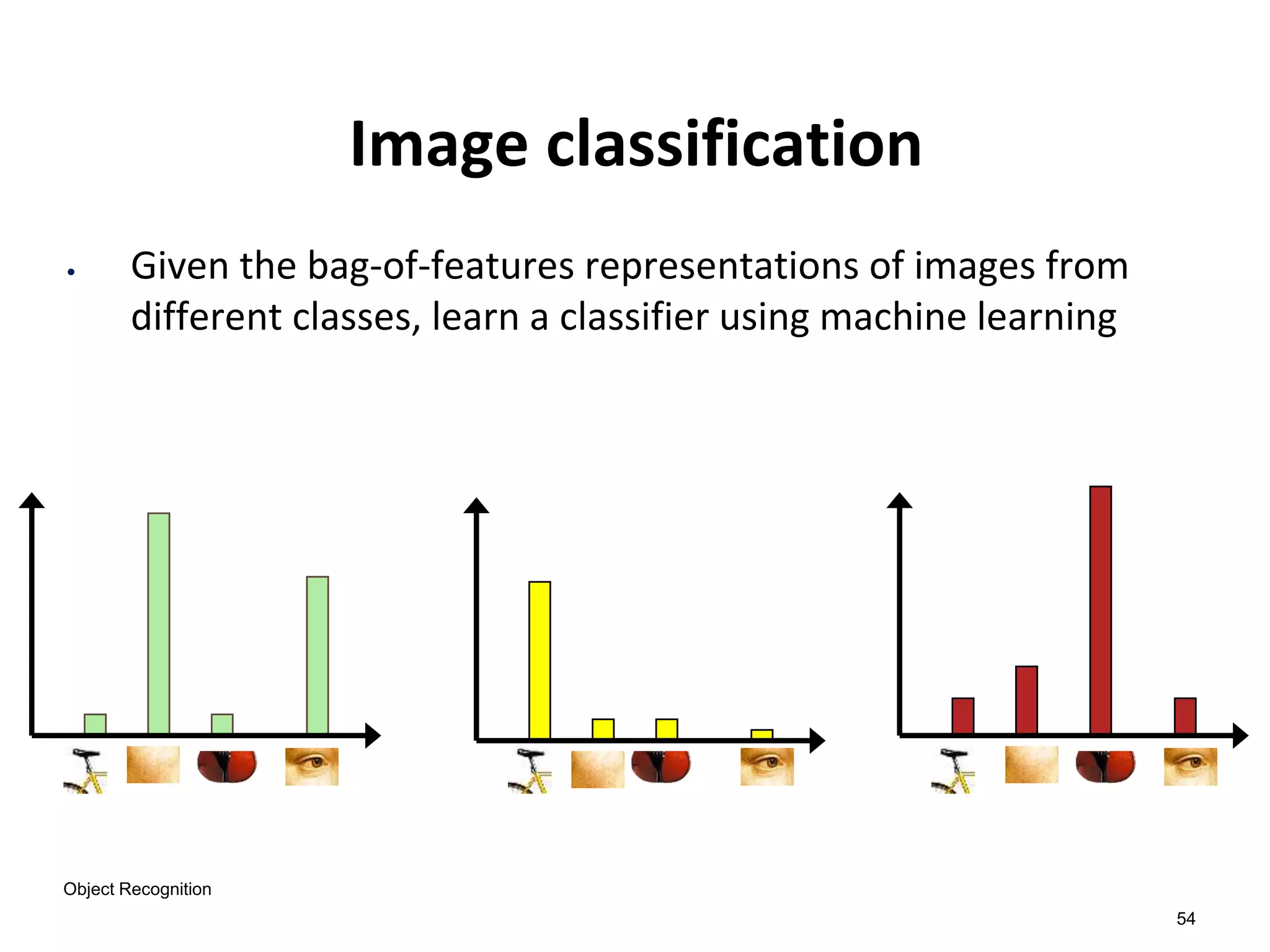


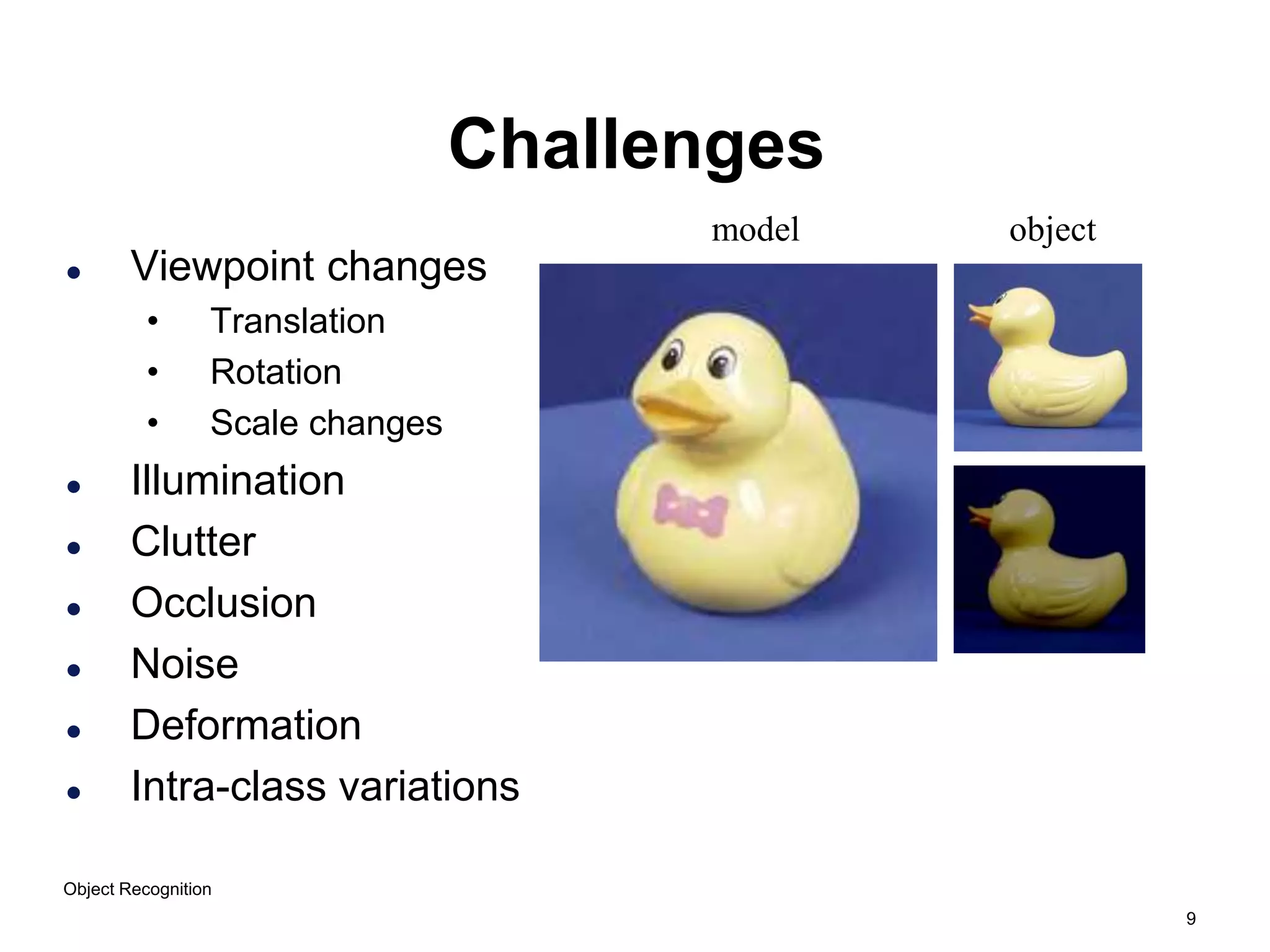
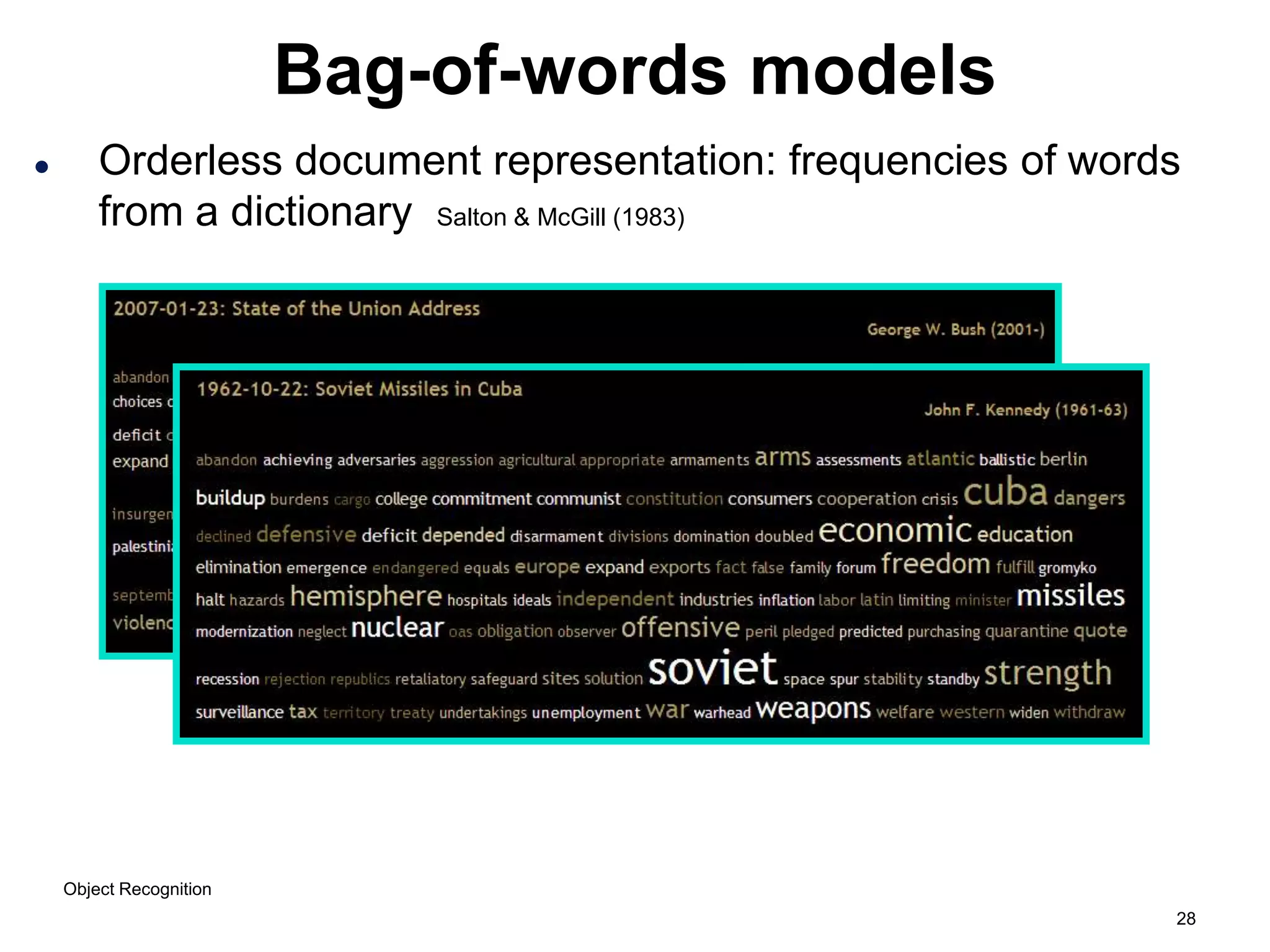
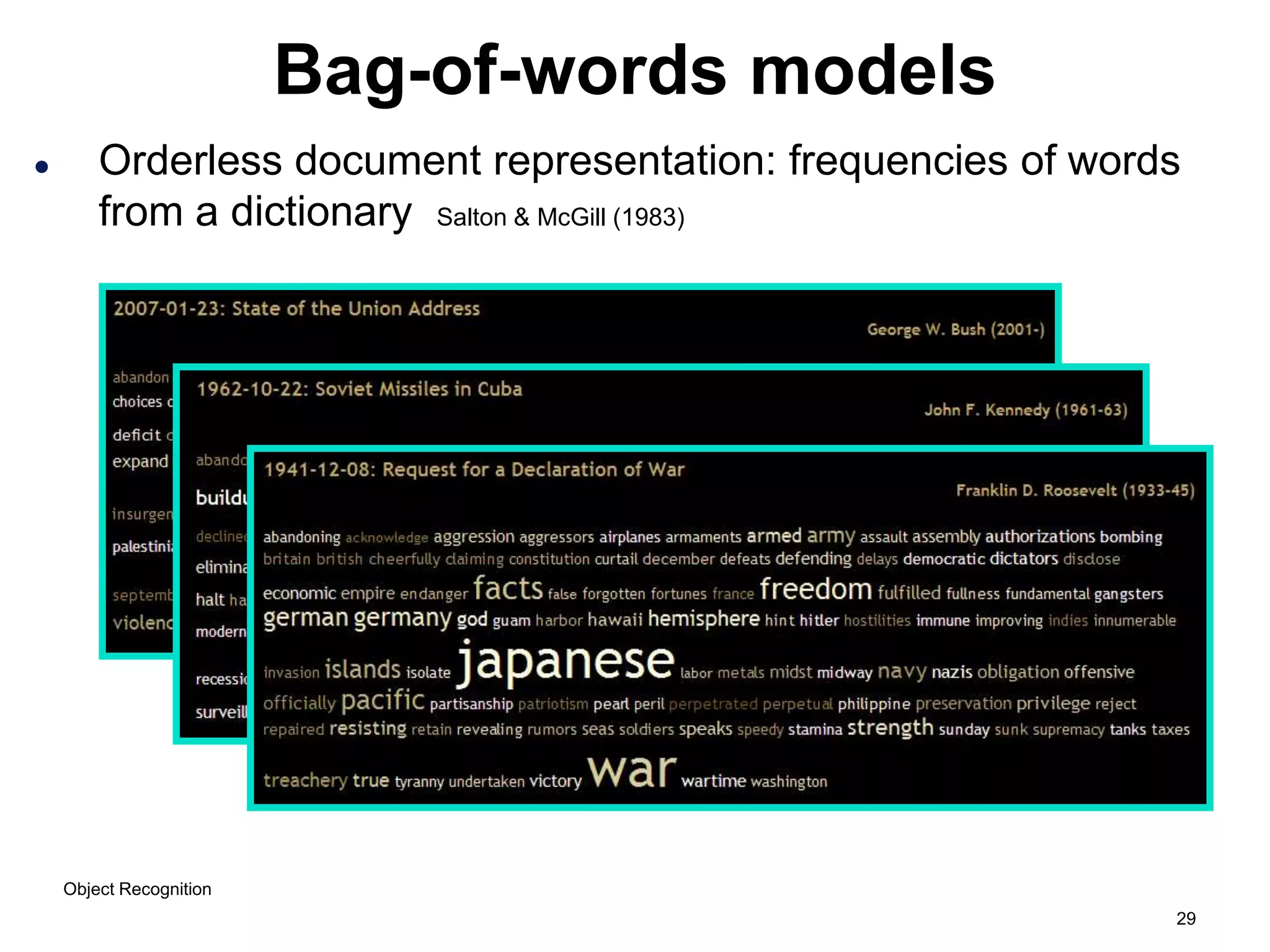
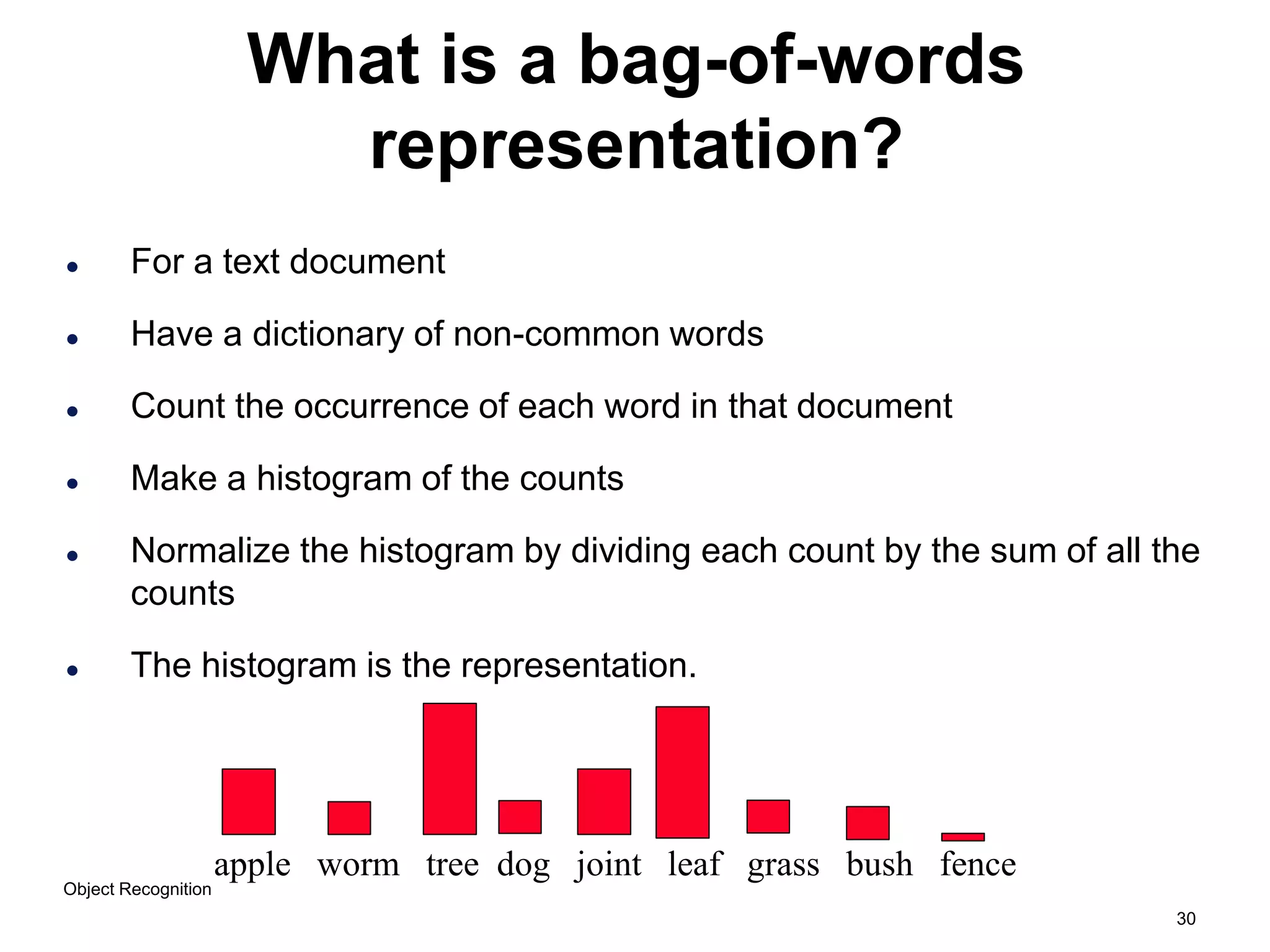
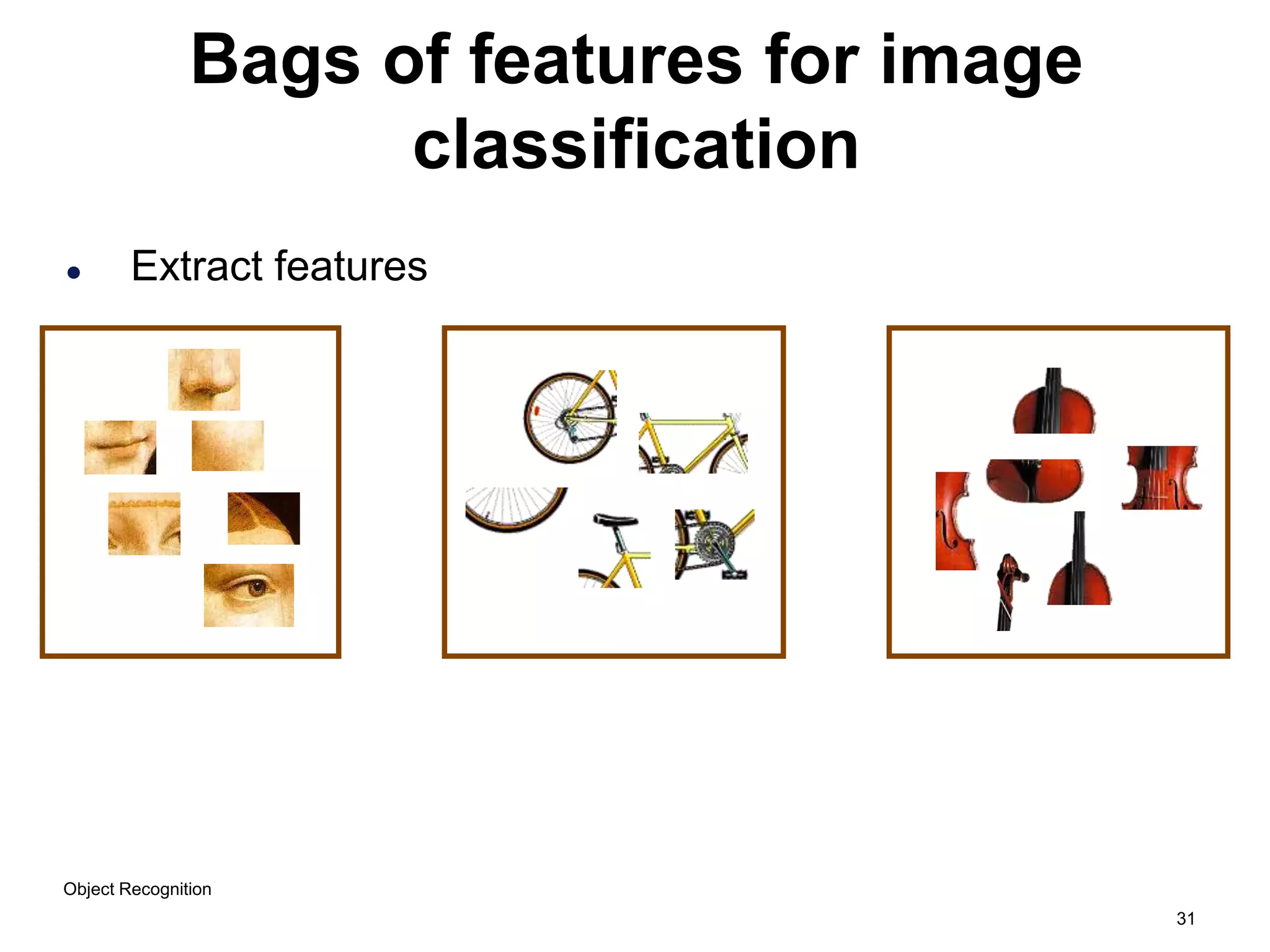
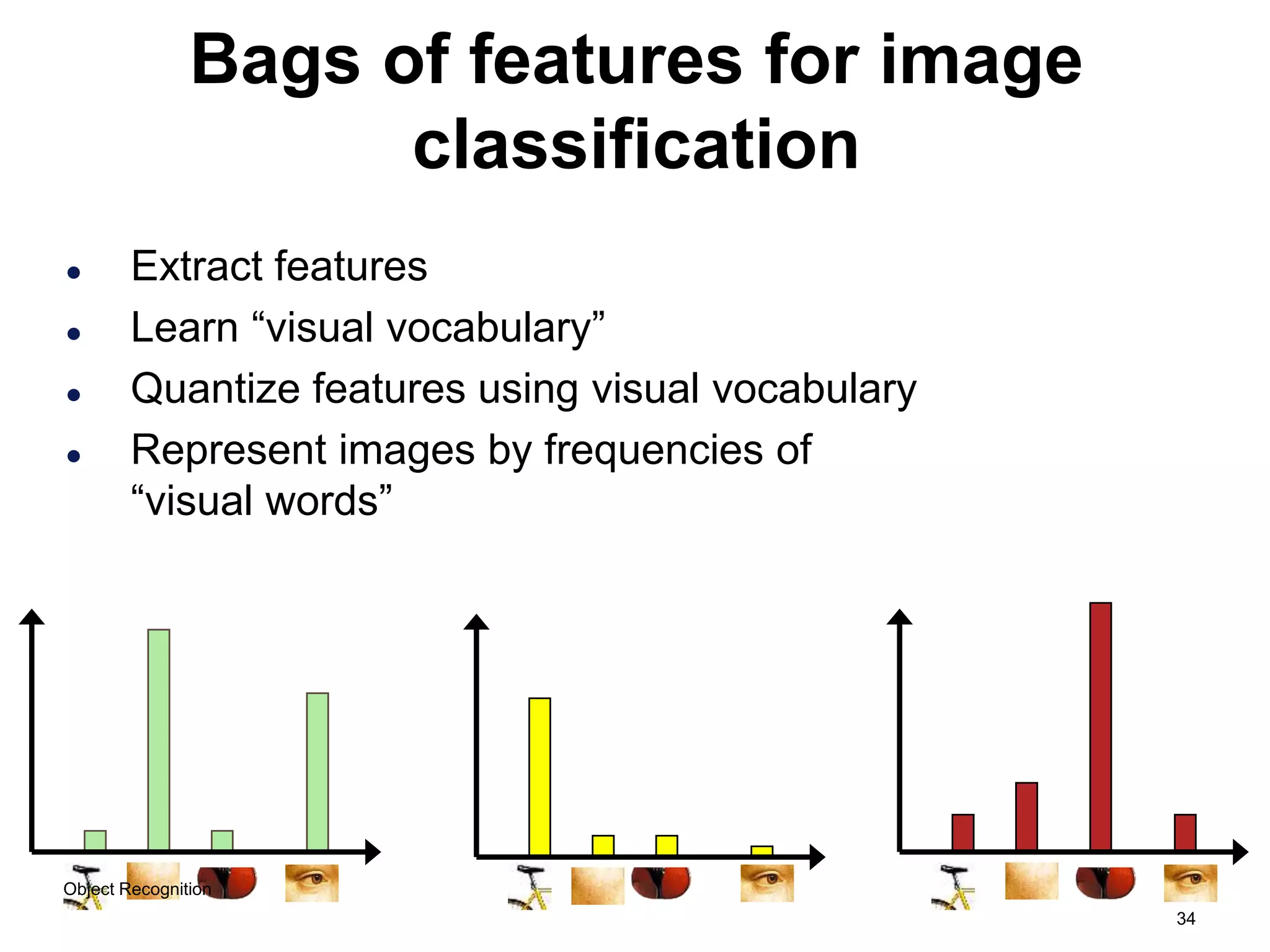
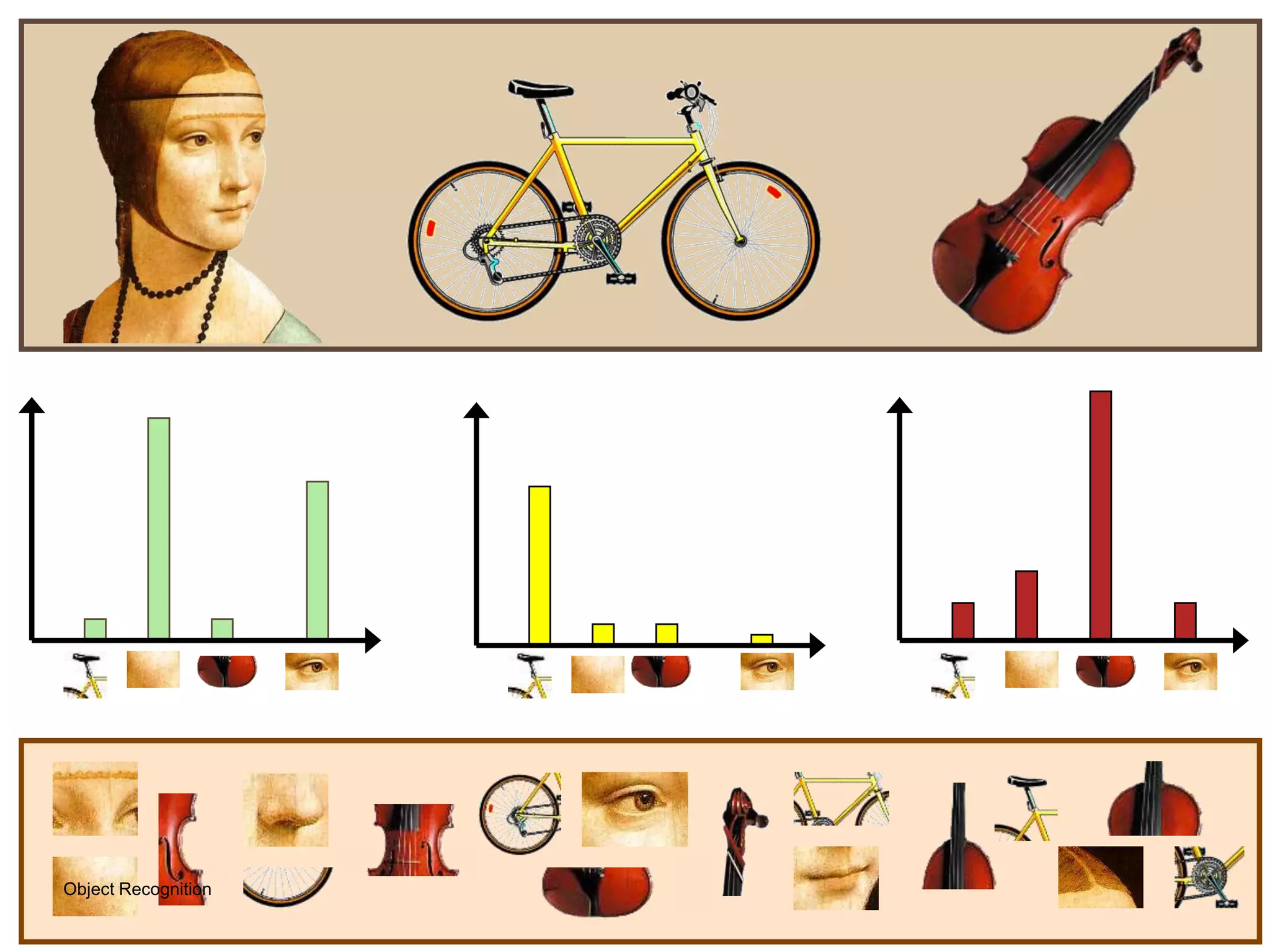
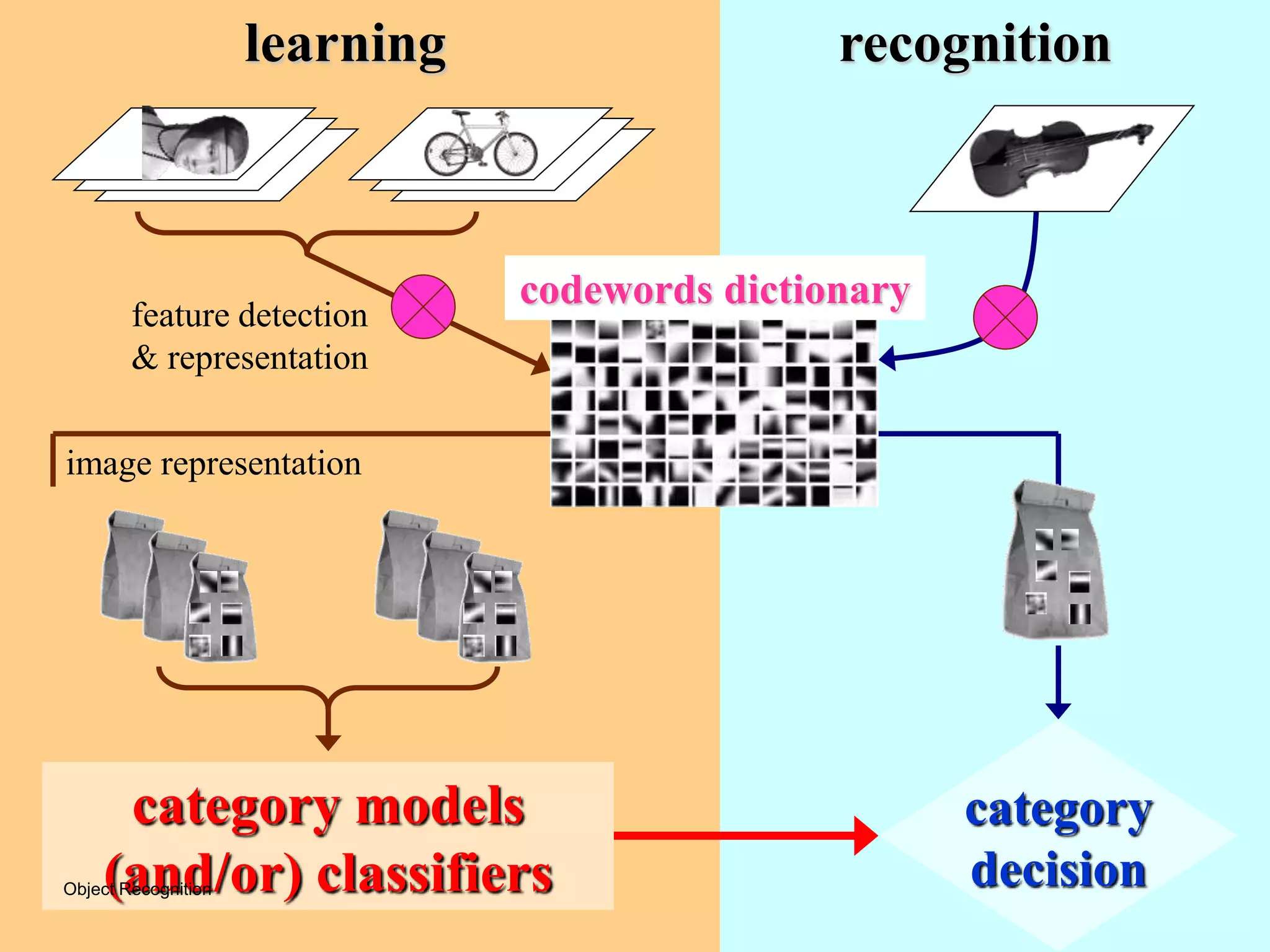
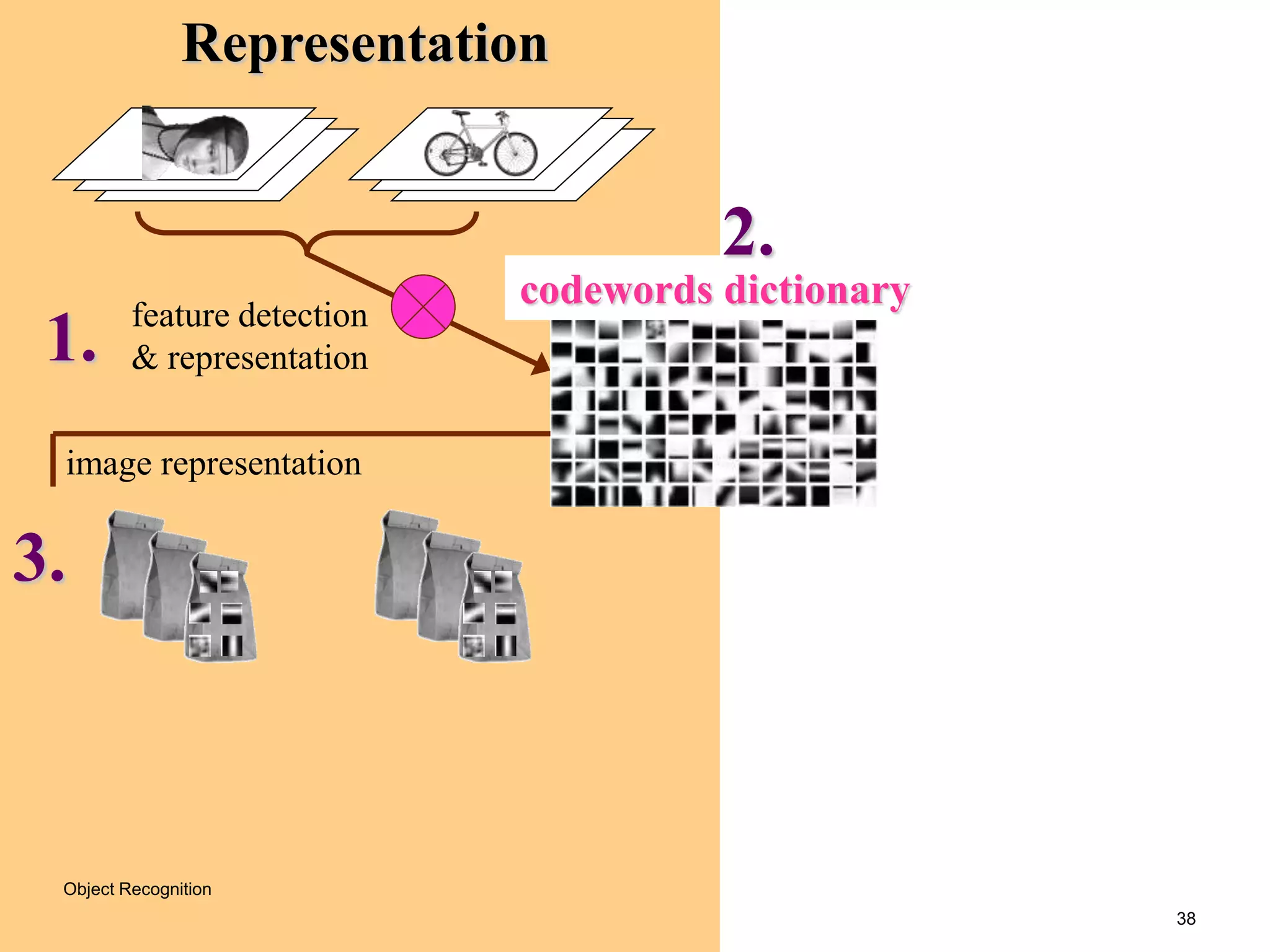
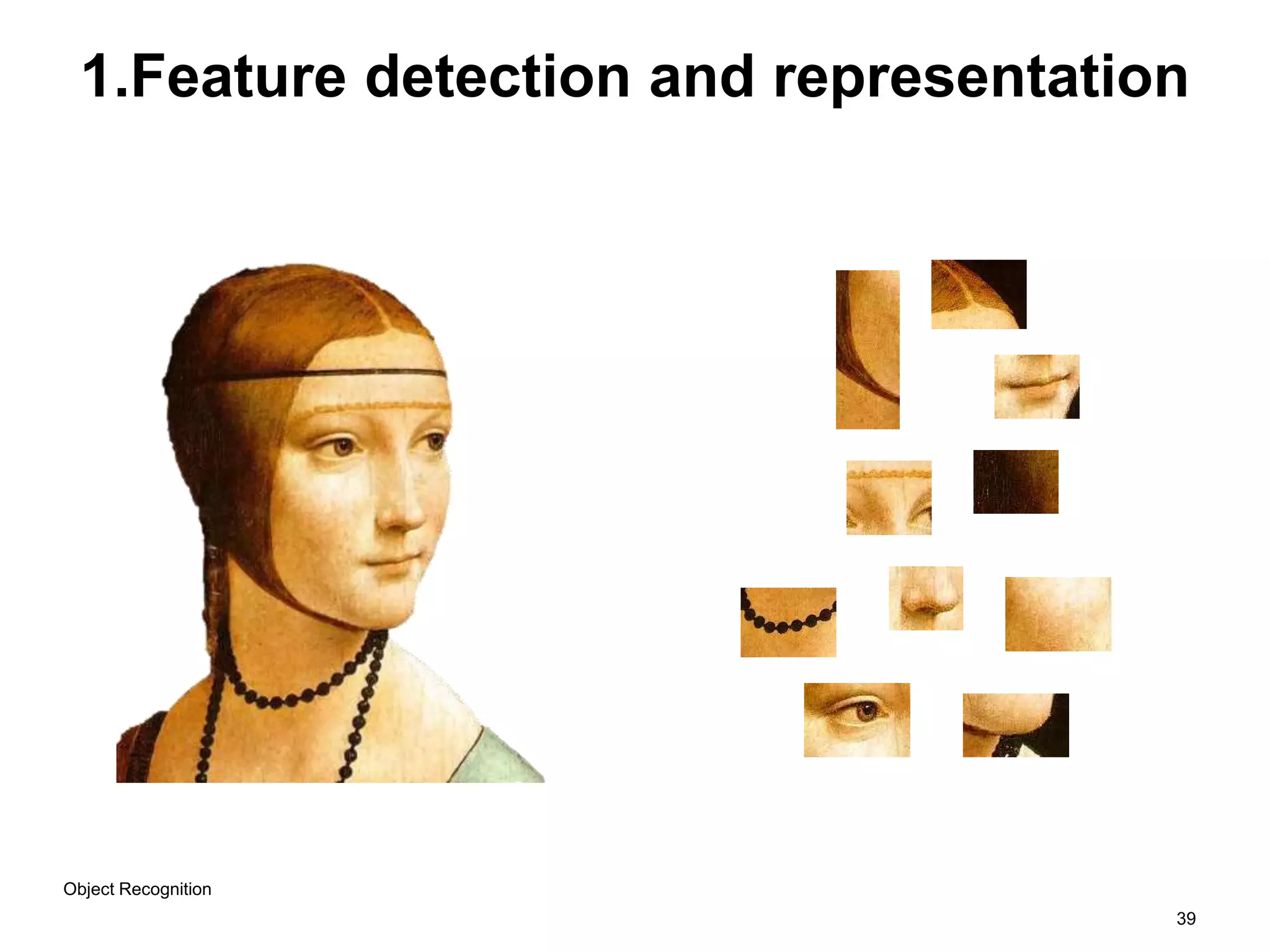
This document provides an overview of object recognition techniques. It begins by defining object recognition and describing its main challenges, including viewpoint changes, illumination, clutter, occlusion, and intra-class variations. It then outlines common object recognition approaches, including 2D-based recognition using global and local descriptors, and bag-of-words models. Bag-of-words models represent images as histograms of visual word frequencies. The document explains how bag-of-words representations are constructed by extracting local features from images, clustering them to form a visual vocabulary or codebook, and quantizing features to this codebook.