Download to read offline
































![Hough transform algorithm
1. Initialize H[R, ]=0
2. for each edge point I[x,y] in the image
for = 0 to 180
H[R, ] += 1
3. Find the value(s) of (R, ) where H[R, ] is
maximum
4. The detected line in the image is given by
sincos yxR
sincos yxR
Image Features I 50](https://image.slidesharecdn.com/09cie552imagefeaturesi-200321060555/75/09-cie552-image_featuresi-50-2048.jpg)







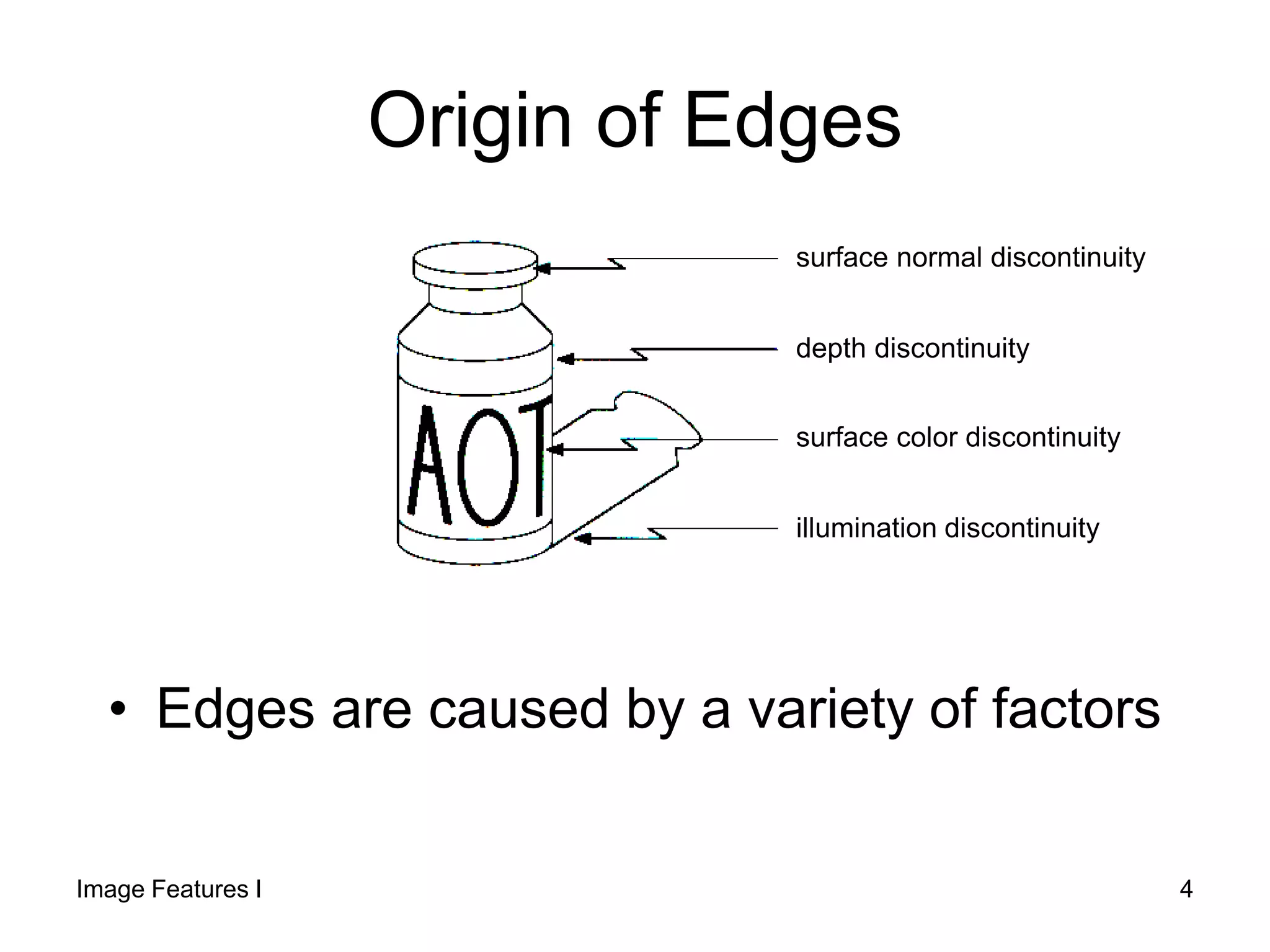
1) The document discusses edge detection and the Hough transform for detecting lines and circles in images. It describes common edge detectors like Sobel, Canny, and LoG and explains how they work. 2) It then introduces the Hough transform as a method to detect lines and circles by having each edge point "vote" for possible lines and circles it could belong to in a parameter space. 3) The Hough transform reduces the complexity from quadratic to linear time compared to examining all pairs of edge points, and is less sensitive to gaps or noise in the edge points.