Download to read offline









![Otsu’s Image Segmentation
Algorithm
• Find the threshold that minimizes the weighted
within-class variance.
• Equivalent to maximizing the between-class
variance.
• Operates directly on the gray level histogram
[e.g. 256 numbers, P(i)]
• It is fast (once the histogram is computed).](https://image.slidesharecdn.com/08cie552imagesegmentation-200321060507/85/08-cie552-image_segmentation-29-320.jpg)

![Finally, the individual class variances are:
1
2
(t) [i 1(t)]2 P(i)
q1(t)i1
t
L
ti tq
iP
tit
1 2
2
2
2
2
)(
)(
)]([)(
Run through the full range of t values and pick the value that minimizes w
2
(t)
Otsu’s method: Formulation
w
2
(t) q1(t)1
2
(t) q2 (t)2
2
(t)](https://image.slidesharecdn.com/08cie552imagesegmentation-200321060507/85/08-cie552-image_segmentation-32-320.jpg)





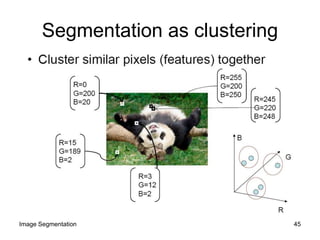
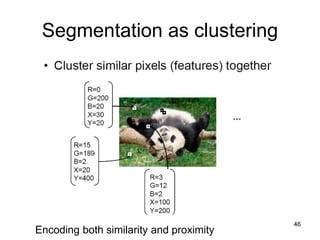
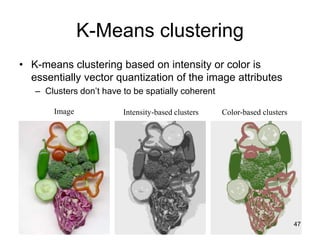



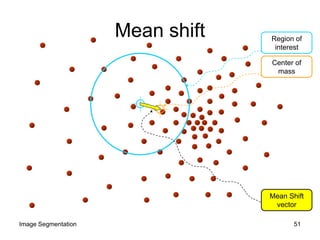
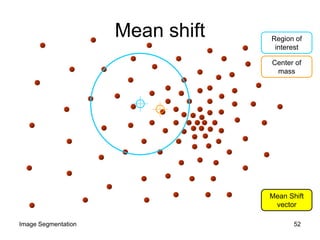
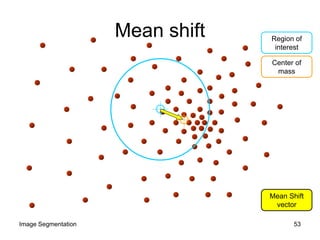
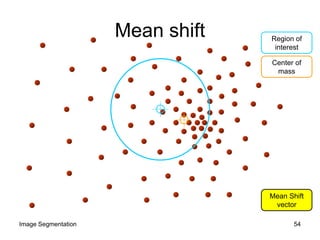
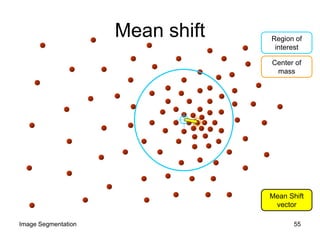
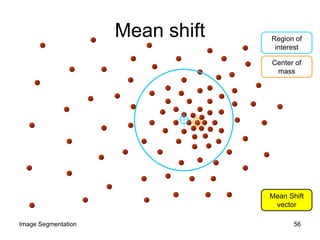


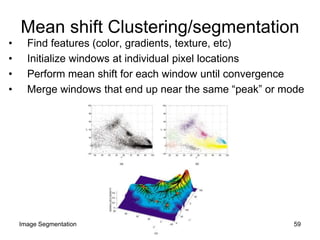




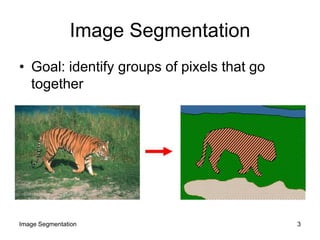
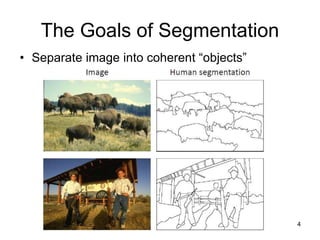
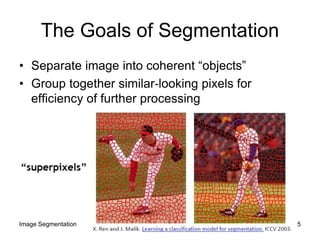
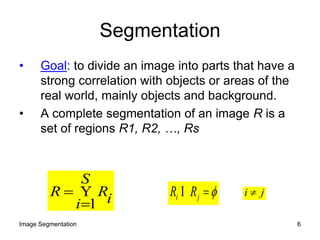
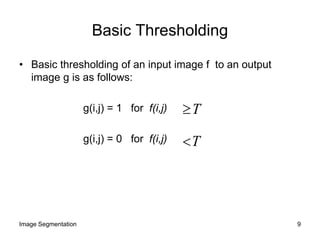
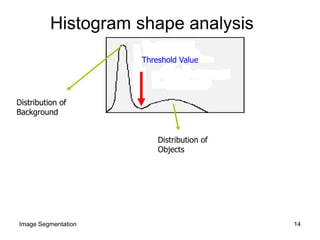
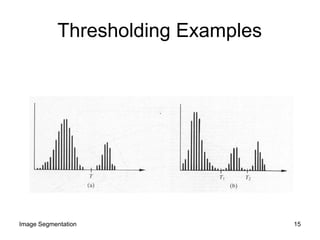
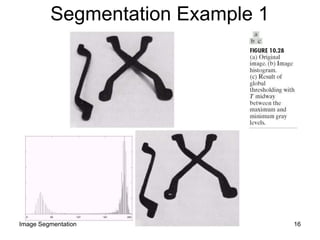
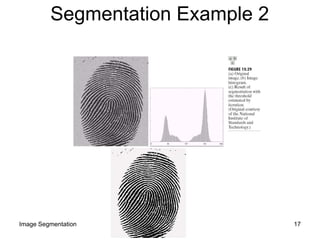
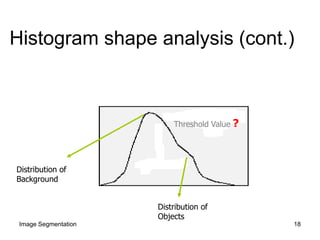
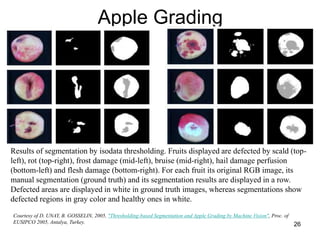
This document discusses various image segmentation techniques including thresholding, clustering, and mean shift segmentation. Thresholding techniques include basic, multi, band, and semi-thresholding. Threshold detection methods analyze the image histogram to select an optimal threshold. Algorithms like iterative threshold selection and recursive multi-spectral thresholding are also presented. Segmentation can also be viewed as a clustering problem, where K-means clustering groups pixels based on intensity or color. Mean shift segmentation treats segmentation as a density estimation problem, using an iterative procedure to locate dense regions in feature space.