Download as PDF, PPTX

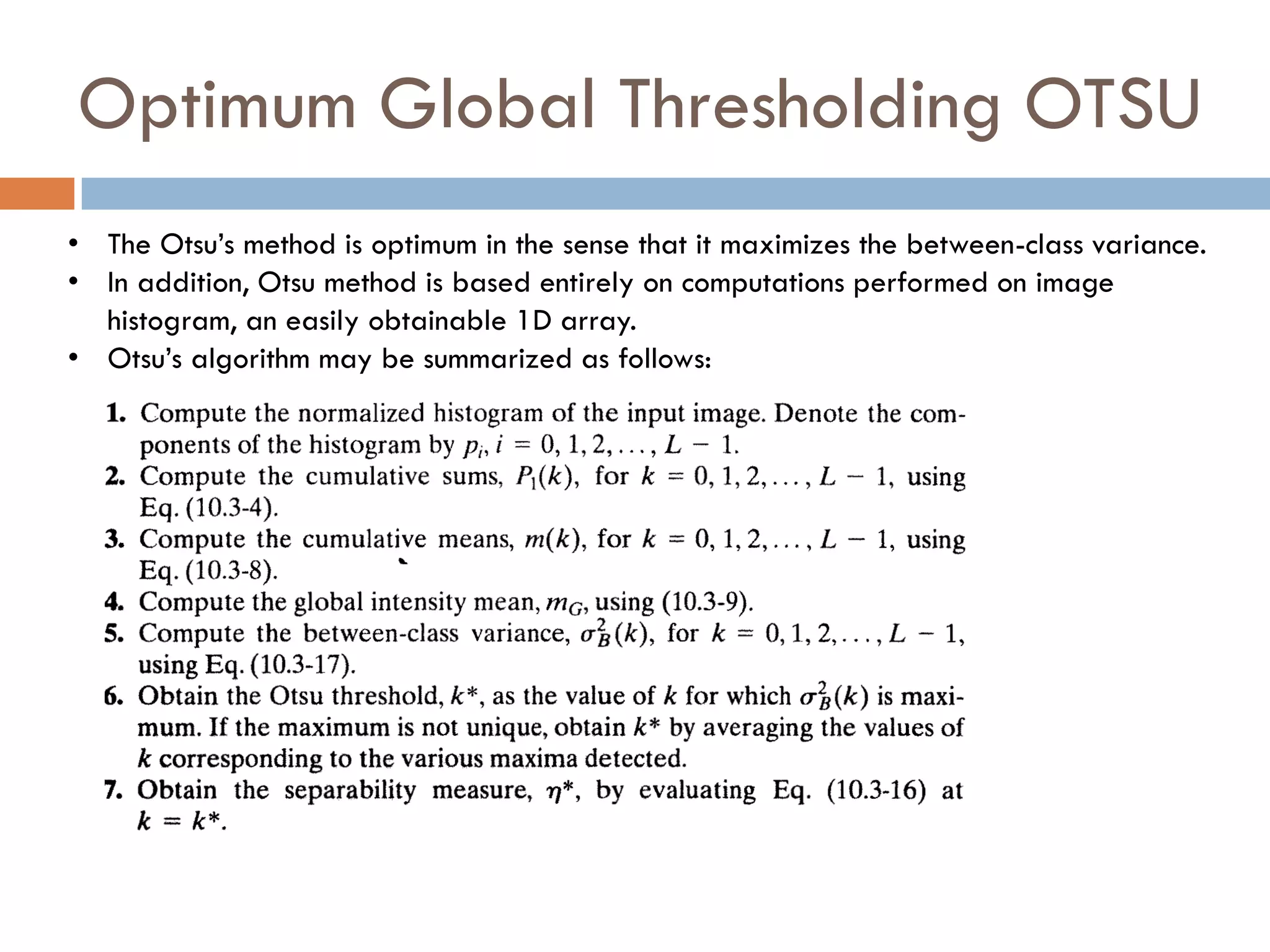
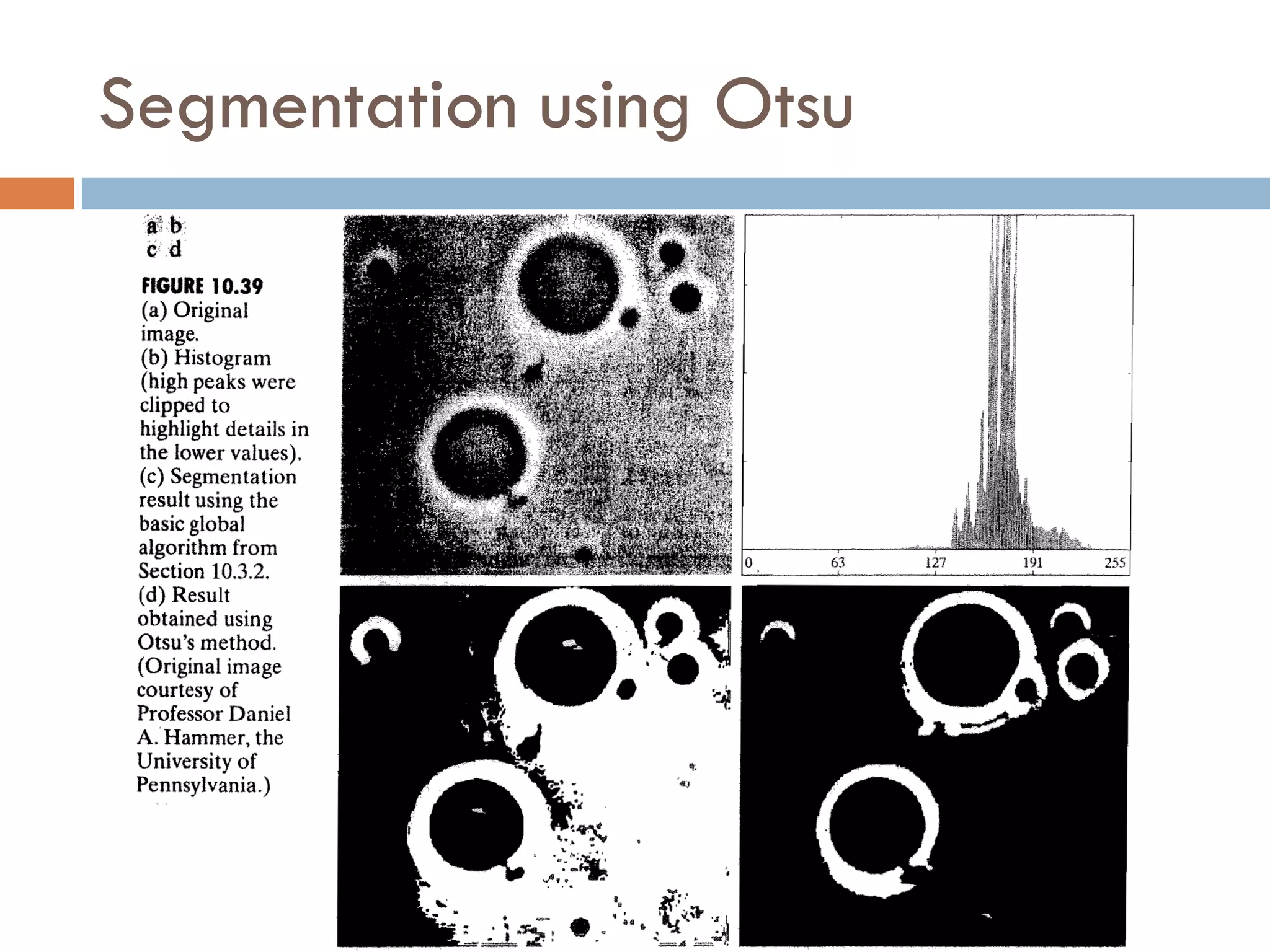
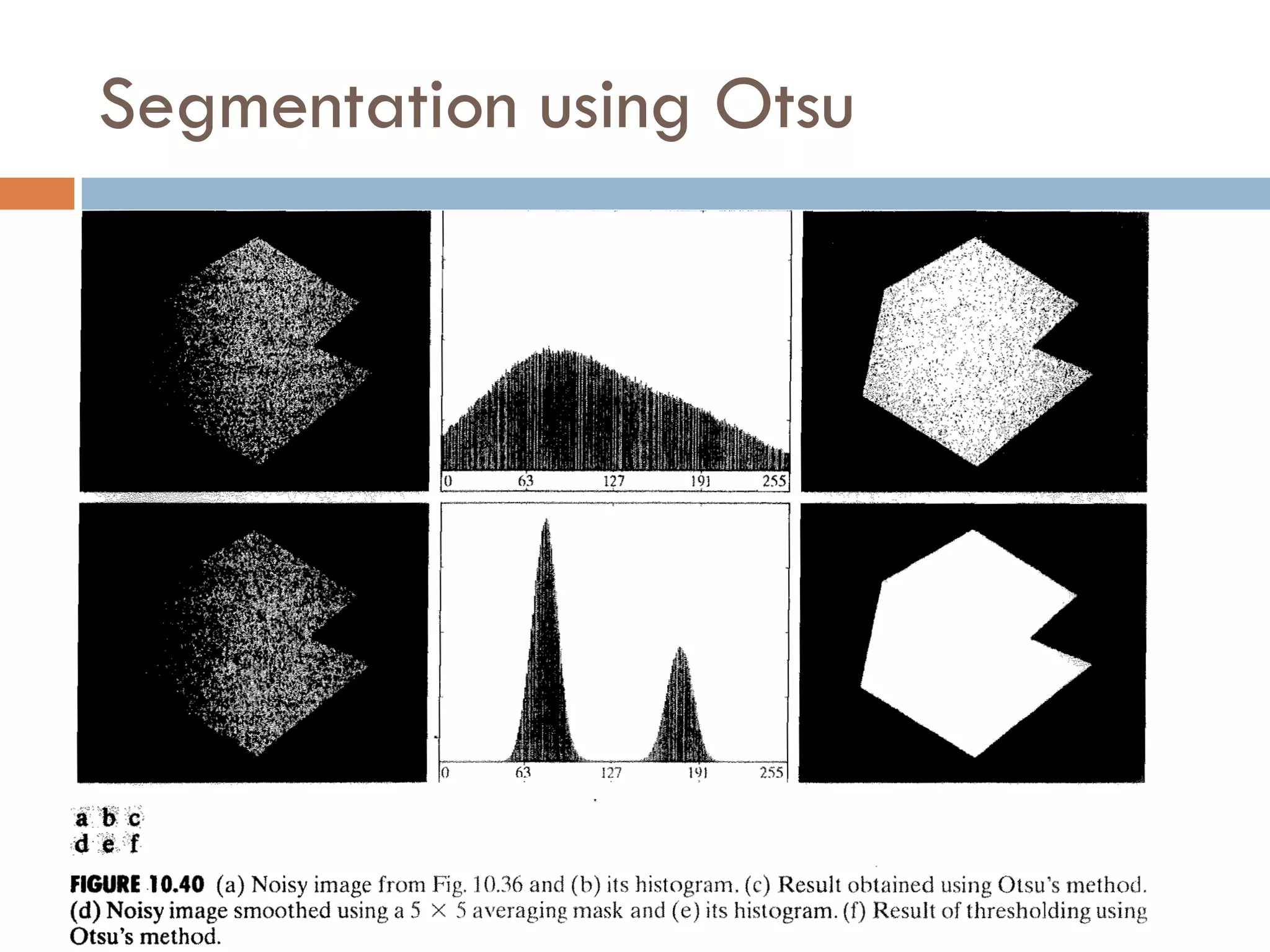
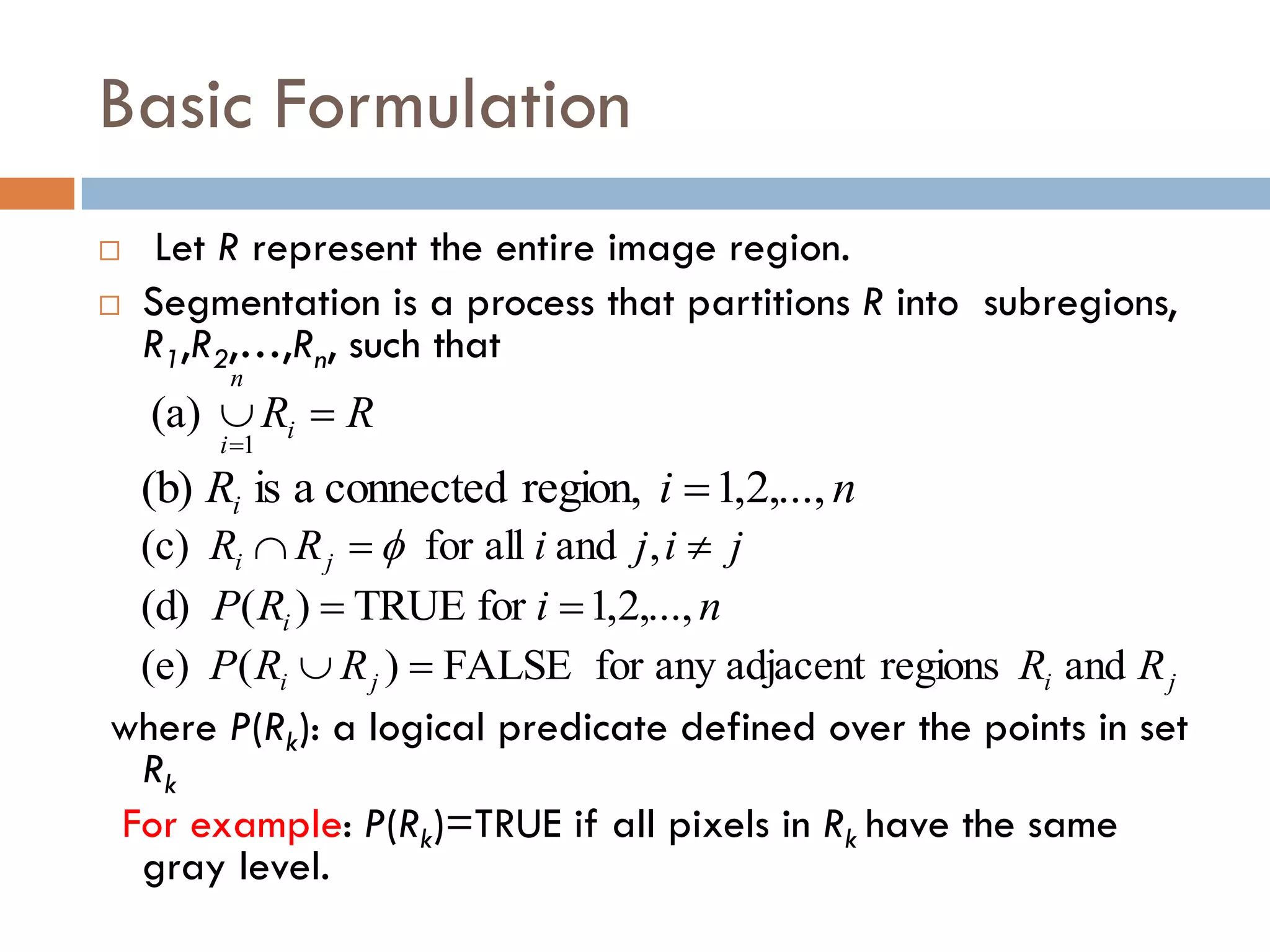
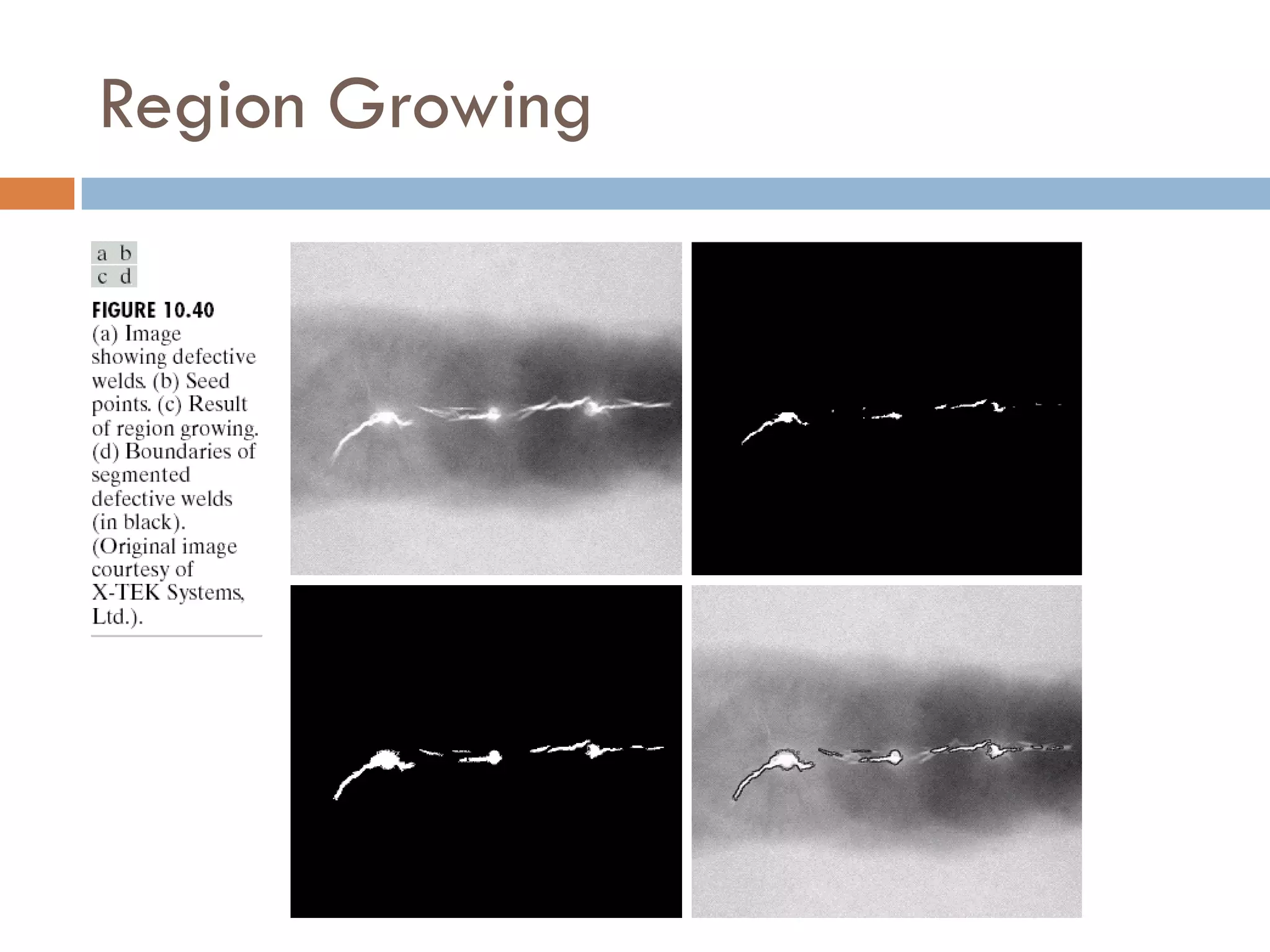
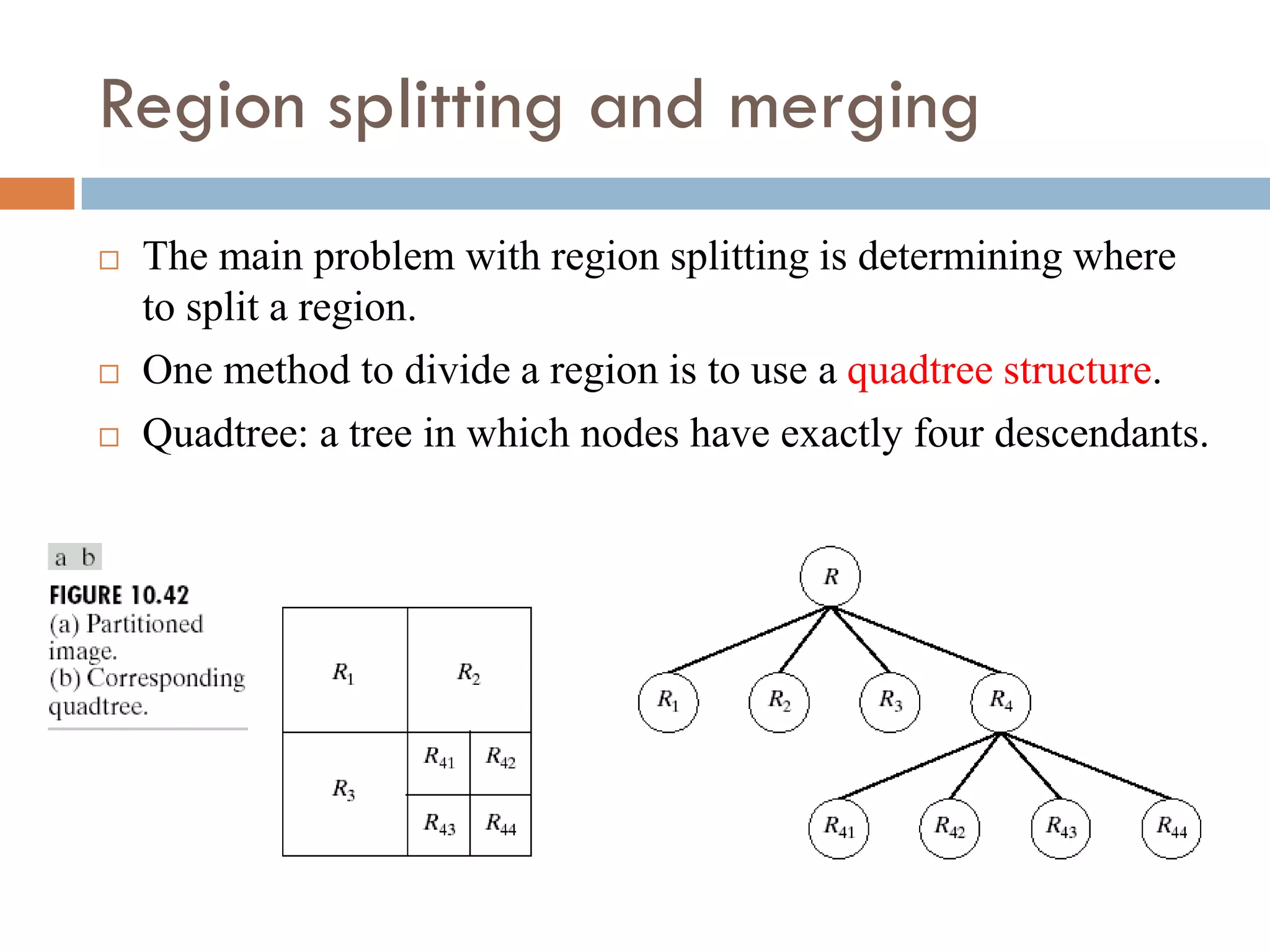
This document discusses different techniques for image segmentation. It begins by defining image segmentation as dividing an image into regions based on similarity and differences between adjacent regions. The main approaches discussed are discontinuity-based segmentation, which looks for sudden changes in pixel intensity (edges), and similarity-based segmentation, which groups similar pixels into regions. The document then examines various methods for detecting edges, linking edges, thresholding, and region-based segmentation using techniques like region growing and splitting/merging.