Downloaded 564 times
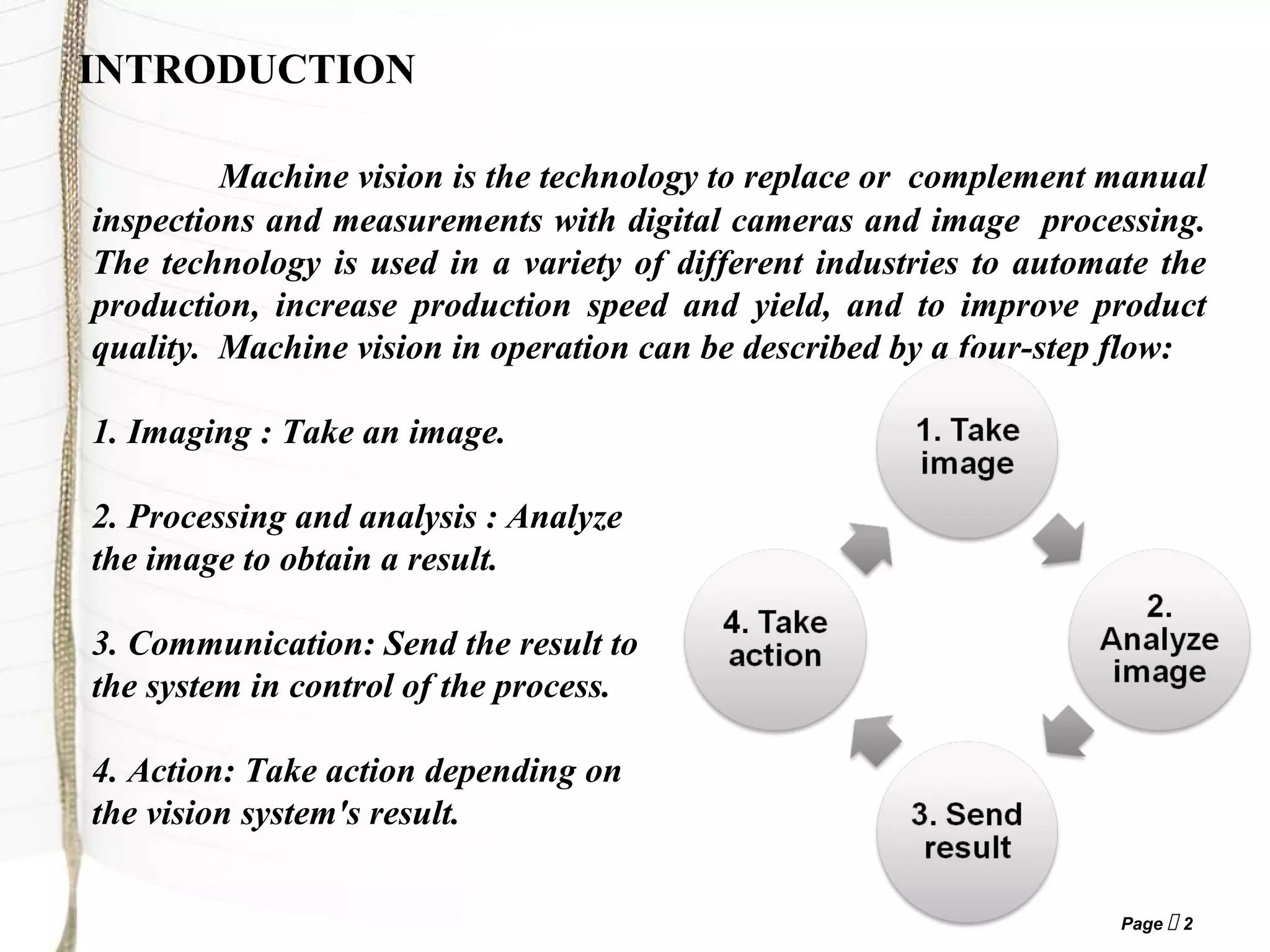


1) Machine vision uses digital cameras and image processing to automate production processes and quality inspections by replacing manual methods. 2) A machine vision system involves four steps: imaging, image processing/analysis, communicating results to the control system, and taking appropriate action. 3) The main components of a machine vision system are cameras, lighting systems, frame grabbers, and computer/software to process images and analyze results.





















































![Welcome to the New-Era in Automation]](https://cdn.slidesharecdn.com/ss_thumbnails/a73cde01-449f-4ab4-b012-7731e75ab889-160705040211-thumbnail.jpg?width=640&height=640&fit=bounds)