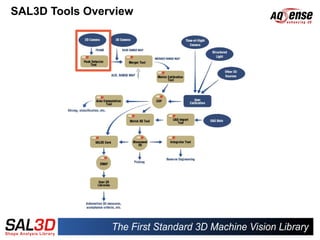
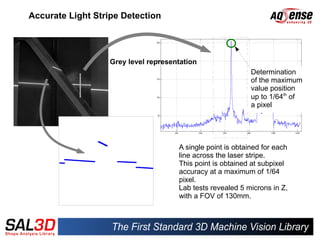
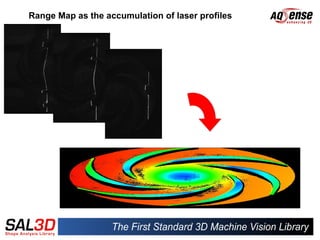
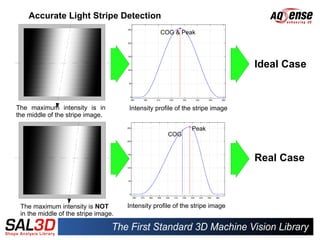
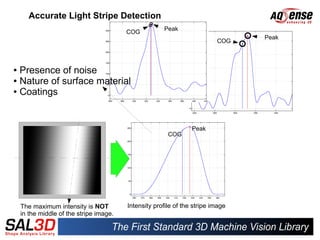
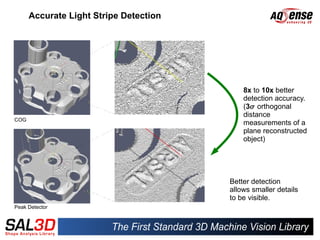
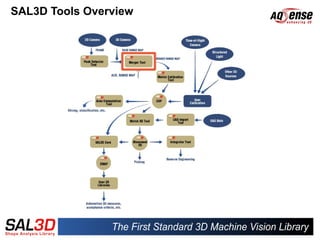
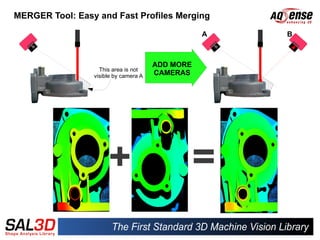
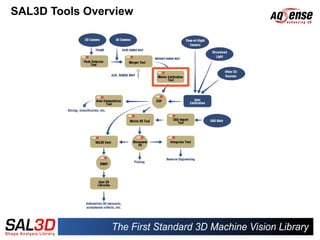
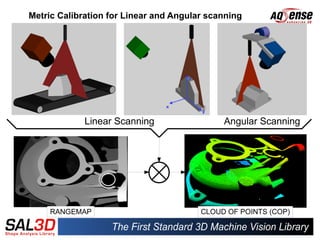
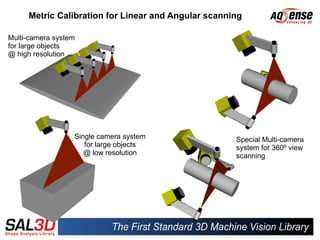
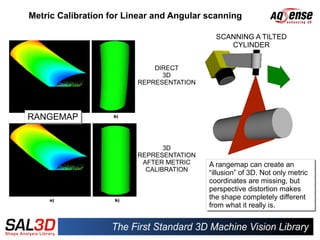
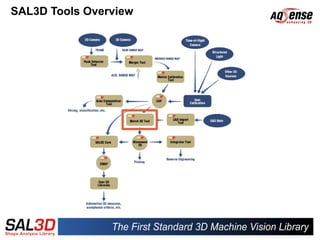
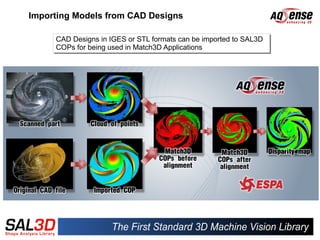
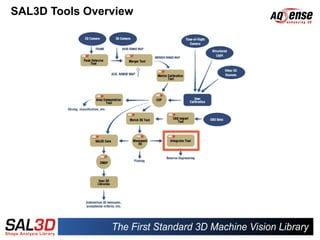
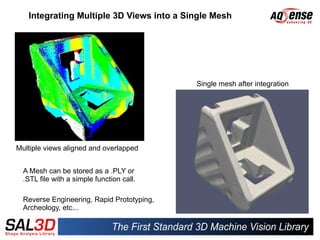
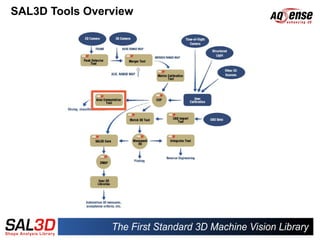
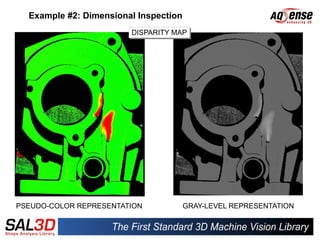
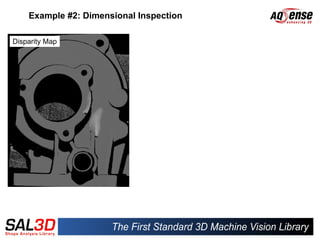
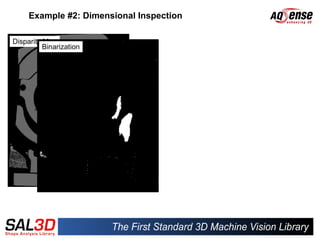
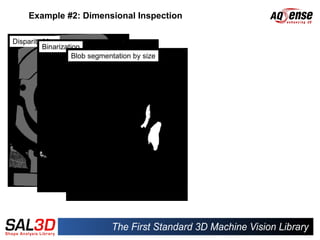
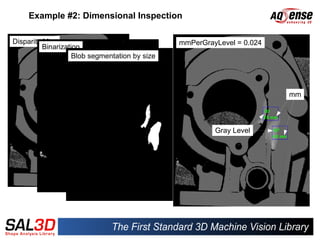
Aqsense develops and commercializes 3D image acquisition and processing technologies for high-speed production inspection in the machine vision industry, utilizing tools like the SAL3D Point Cloud Manager for efficient data management. The document outlines features such as accurate light stripe detection, metric calibration, and tools for dimensional inspection, along with various applications demonstrating the technology's effectiveness. SAL3D can be integrated with standard 2D libraries, making it versatile across multiple industrial sectors.