This document discusses machine vision and various components of machine vision systems. It describes different types of sensors used in machine vision like cameras, frame grabbers, and describes the process of sensing and digitizing image data through analog to digital conversion, image storage, and lighting techniques. It also discusses image processing and analysis techniques like segmentation, feature extraction and object recognition. Finally, it provides examples of applications of machine vision systems in inspection, identification, and navigation.
Introduction to sensor requirements, principles, and applications including various sensor types like position, range, and compliance sensors.
Machine vision is crucial for industrial inspection, utilizing digital cameras and image processing to inspect products like semiconductors and automobiles.
Overview of essential components in machine vision systems with a focus on cameras, lighting, and processing.
Details on different camera types, primarily focusing on Vidicon Camera principles, advantages, disadvantages, and applications.
Explanation of CCDs used in digital imaging with details on their construction, working, advantages, disadvantages, and applications.
Description of CID technology, advantages like reduced noise, and applications in missile tracking and factory inspections.
Functionality and applications of CMOS in digital imaging, including advantages and issues like pattern noise.
Function and types of frame grabbers used in image acquisition, application areas, and the integration with cameras.
Processes involved in sensing and digitizing images, including signal conversion, sampling, storage, and various lighting techniques.Methods of processing and analyzing images, including segmentation, feature extraction, and recognition algorithms.
Techniques like pattern recognition and histogram analysis used for different applications in machine vision.
Real-world applications of machine vision in inspecting products like bottles and predicting egg volumes, highlighting its versatility.
Discussion of the problems and challenges faced in the implementation and effectiveness of machine vision systems.
UNIT-3 SENSORS ANDMACHINE VISION
Requirements of a sensor, Principles and Applications of the
following types of sensors- Position sensors – Piezo Electric
Sensor, LVDT, Resolvers, Optical Encoders, pneumatic Position
Sensors, Range Sensors Triangulations Principles, Structured
Lighting Approach, Time of Flight, Range Finders, Laser Range
Meters, Touch Sensors ,binary Sensors, Analog Sensors, Wrist
Sensors, Compliance Sensors, Slip Sensors, Camera, Frame
Grabber, Sensing and Digitizing Image Data- Signal Conversion,
Image Storage, Lighting Techniques, Image Processing and
Analysis-Data Reduction, Segmentation, Feature Extraction,
Object Recognition, Other Algorithms, Applications- Inspection,
Identification, Visual Serving and Navigation.
2.
Introduction
Machine Visionis the application of computer vision
industry and manufacturing.
It is requires also digital input or output devices and
Computers network to control other manufacturing
equipment such as robot arms.
Application of machine vision is the inspection of
manufactured goods such as semiconductor
chips,automobiles,food pharmaceuticals.
Machine vision systems use for Digital cameras, smart
camera, image processing software to perform similar
inspections.
3.
Introduction
Define Vision:
Vision is the ability to see and recognize objects by
collecting the light reflected of these objects into an image
and processing that image.
Define machine Vision:
Machine vision also known as industrial image
processing. It is important tool for the optimization and
automatic monitoring of production process.
Types of Machine vision system:
1.Robot vision system.
2.Computer vision system.
3.Machine vision system.
4.
Introduction
Basic typesof Machine vision:
1.Image formation 2.Processing of image
3.Analysis of image. 4.interpretation of image.
Uses of Machine vision:
1.Mistake proofing 2.Tolerance Monitoring
3.Dimensional measurement 4.Part presence and orientation.
5.Robot guidance and alignment.
6.Traceability and marking Verification.
Various of components of machine vision system:
1.Lighting 2.Lenses 3.Vision Processing 4.Image sensor
5.Communication.
Camera
Camera captureimportant information store and archive it
and allow users or software to make decisions based on
image information.
It produces analog signal to digitized by frame grabber.
Captures individual still image.
Examples: Measure and count product, calculate the
product weight and volume
Digital Camera: Record images using Digital technology.
Digital camera have a built in computer and all of them
record images electronically.
Types of Camera:
1.Vidicon Camera
2.Charge coupled device 3.Charge injection Device(CID)
4.Complementary medal oxide semiconductor(CMOS)
7.
Camera
Vidicon Camera:
Which is used to work based on photo conductive
properties of semi conductors. Decrease in resistance with
the amount of incident light.
Construction and Working:
8.
Vidicon Camera
Thiscamera technique used is same as in television.
Change in electrode is proportional to amount of light
received.
It does not break image in pixel as CCD camera.
Metallic film very thin so as to be transparent. it is facing
with cathode.
Side is scanned by electron beam.
Electron beam for scanning is formed by combination of
cathode 1.Control grid 2.Acceleration grid 3.Anode grid
Photo conductive material is created by 30V.
Before the next scanning which may be done after interval
of 1/50 or 1/25 sec.
9.
Vidicon Camera
Advantages:
1.Low Cost 2.More flexible 3.Sensitivity
4.Resolution is high 5.Long life and small size
Disadvantages:
1.Analog output 2.High image lag 3.High dark current
4.Imposes constrains on system designer.
Applications:
Education
Medicine
Automobile
Aerospace
Oceanography.
Television Industry.
10.
Charge Coupled Device(CCD)
It is a charge transfer device.
CCD are sensors used in digital camera and video camera
to record still and moving images. Its capture lights and
converts digital data that is recorded by the camera.
Construction and Working:
11.
Charge Coupled Device(CCD)
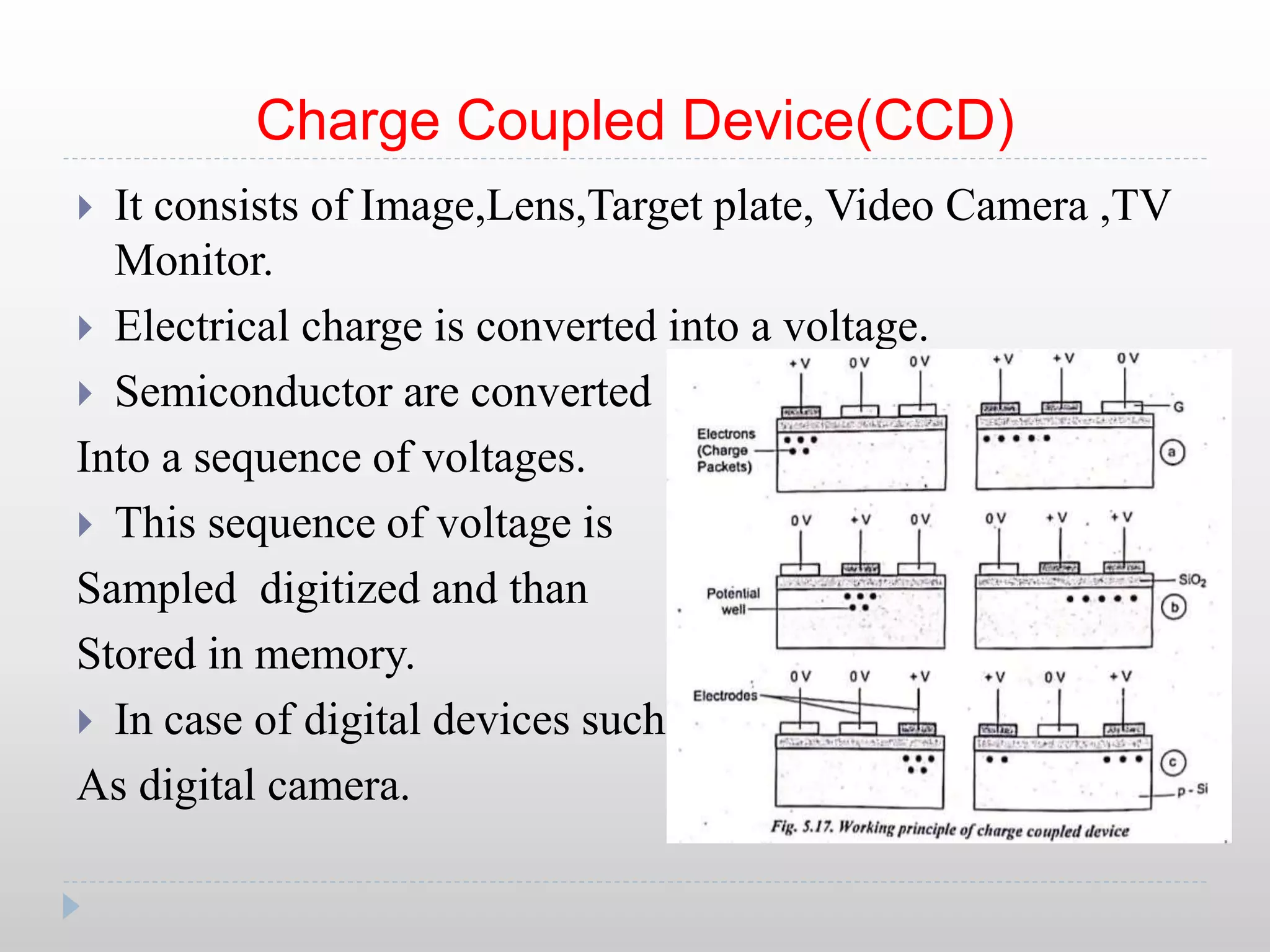
It consists of Image,Lens,Target plate, Video Camera ,TV
Monitor.
Electrical charge is converted into a voltage.
Semiconductor are converted
Into a sequence of voltages.
This sequence of voltage is
Sampled digitized and than
Stored in memory.
In case of digital devices such
As digital camera.
12.
Charge Coupled Device(CCD)
Advantages:
Compact size
More Reliable
High Dynamic Range
More sensitive at low light.
Disadvantage:
Silicon processing seems to be variation in light sensitivity from
pixel to pixel.
Applications:
Cam
Fax Machines.
Security surveillance Camera.
Dentistry X ray
13.
Charge injection Device(CID)
A solid state imaging device utilizing an image sensor
composed of a two dimensional array of coupled MOS.
(Metal Oxide Semiconductor) charged storage capacitors
and designed to convert near infrared energy to electrical
signals providing broad grey shade.
14.
Charge injection Device(CID)
Which is used Single pixel imaging device and two dimensional
arrays ,Large pixel charge capacities, Wide dynamic range.
Recently developed CID images and camera system, new on
chip architectures and process technology.
CID images posses structural characteristics and improve
radiation tolerance (-10^4 gamma).
Advantages:
Reduce Dark current Reduce background noise
Enhanced detection limits.
Disadvantages:
No direct pixel access Slower readout
Applications:
Missile Tracking
Factory Inspection
15.
Complementary medal oxidesemiconductor(CMOS)
Camera sensor is an electronic chip that converts photons
to electrons for digital processing.
It is basically working principle of photo electric effect.
16.
Complementary medal oxidesemiconductor(CMOS)
CMOS sensor works converts incident photons into
electric charge.
The generated voltage is proportional to brightness and
exposure time.
CMOS is more resistant to smearing or blooming than a
CCD.
17.
Complementary medal oxidesemiconductor(CMOS)
Advantages:
High Speed
Power Consumption.
High Sensitivity.
Disadvantage:
Pattern noise.
Applications:
Digital Camera.
Digital Video Camera.
Digital CCTV Camera.
18.
Frame Grabber
Aframe grabber is a device to acquire [grab] and convert
analog to digital images. Modern FG have many additional
features like more storage, multiple cam
Its play a crucial role in the capture of high resolution, high
quality image in a variety of setting.
Smart camera are capable
of capture digital still
image without the uses
of a frame grabber.
Smart camera capture still
images for low end application.
Mega pixels resolution of
cameras used.
19.
Frame Grabber
Atypical frame grabber consists of – a circuit to recover the horizontal and
vertical synchronization pulses from the input signal;
An analog to digital converter a color decoder circuit, a function that can
also be implemented in software
some memory for storing the acquired image (frame buffer) a bus interface
through which the main processor can control the acquisition and access the
data
Types of Frame Grabber:
Analog Frame Grabber
Digital Frame Grabber.
Circuitry common to both analog and digital grabber.
Purpose:
High speed image acquisition
High resolution.
Application:
Broadcasting
Industrial inspection.
Sensing and DigitizingImage Data
I. Signal Conversion
Analog to Digital conversion.
Analog Signal :A signal could be an analog quantity that
means it is defined with respect to the time. It is
continuous signals.
24.
Sensing and DigitizingImage Data
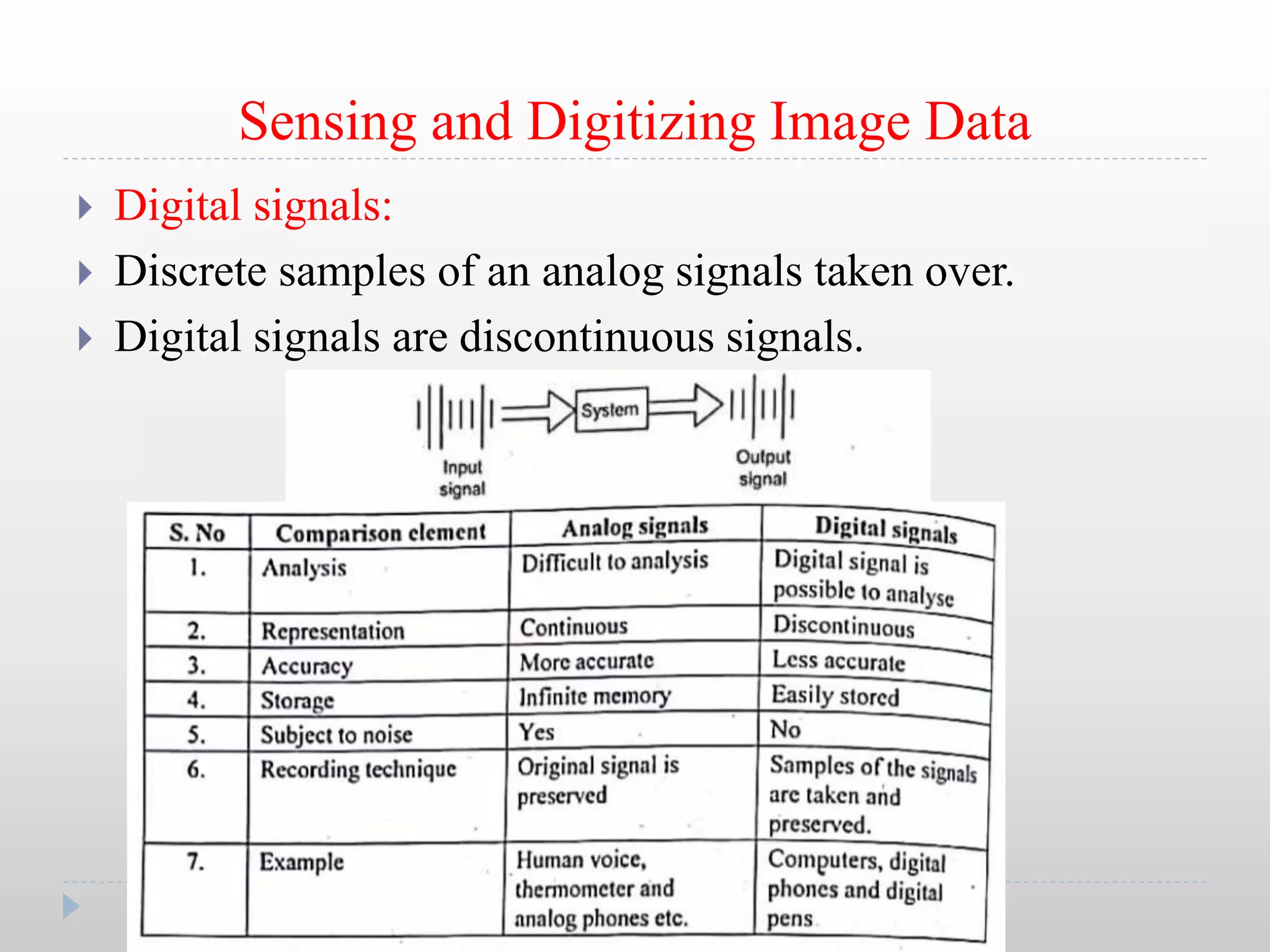
Digital signals:
Discrete samples of an analog signals taken over.
Digital signals are discontinuous signals.
25.
Sensing and DigitizingImage Data
Sampling:
Sampling is process of disonetizing the analog signal to
time.
26.
Sensing and DigitizingImage Data
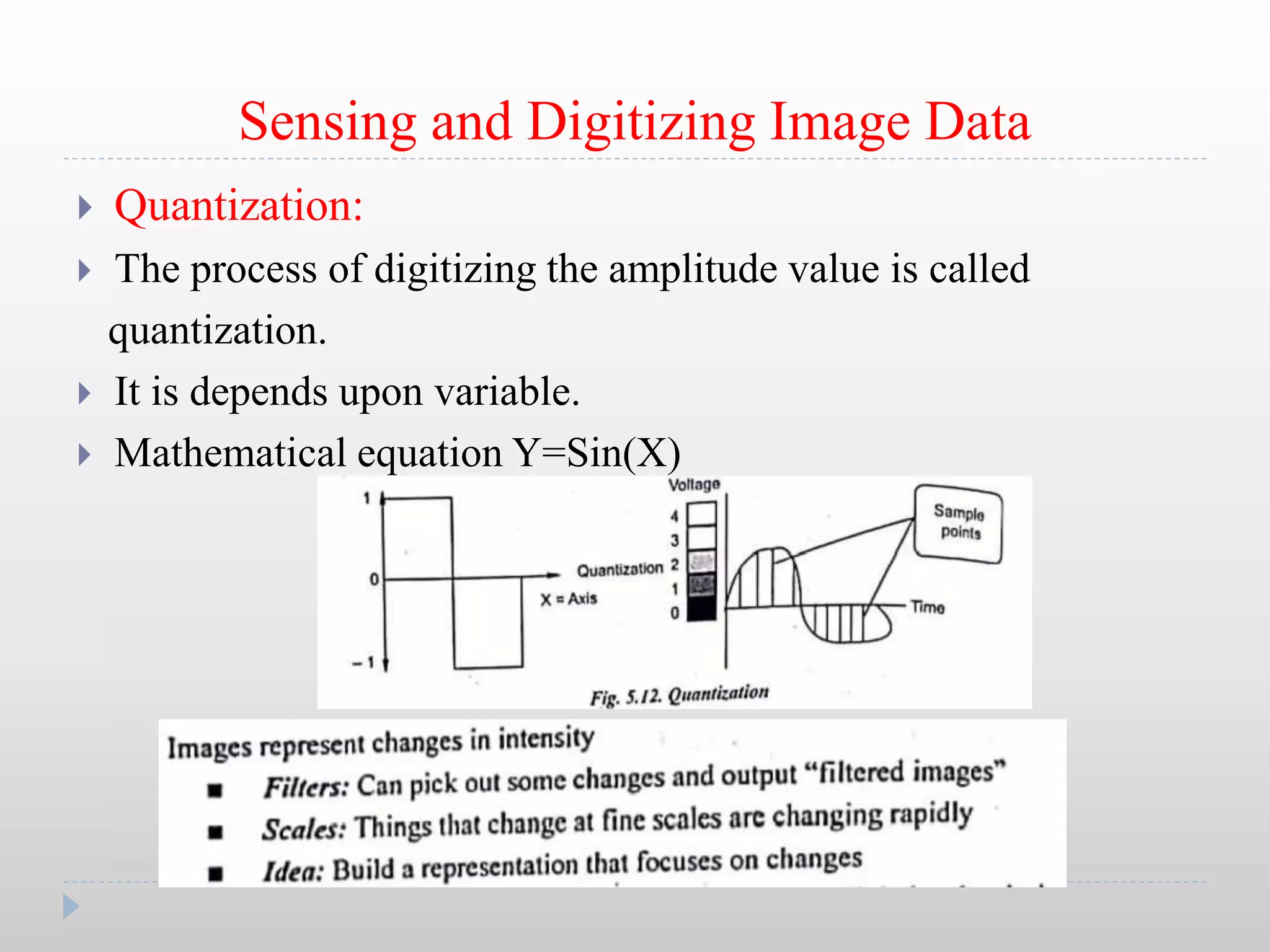
Quantization:
The process of digitizing the amplitude value is called
quantization.
It is depends upon variable.
Mathematical equation Y=Sin(X)
27.
Sensing and DigitizingImage Data
Image Quantitation
Image Digitization.
Image resolution
Grey level resolution
Encoding:
Encoding is the process of converting data from one from
to another.
28.
Sensing and DigitizingImage Data
II. Image Storage/ frame grabber.
A frame grabber is a device to acquire [grab] and convert
analog to digital images. Modern FG have many additional
features like more storage, multiple cam
Its play a crucial role in the capture of high resolution, high
quality image in a variety of setting.
III. Lighting Structured
Machine vision system creates images by analyzing the
reflected light from an object, not by analyzing the object itself.
Types:
Structural Lighting Technique.
Illumination Technique.
29.
Sensing and DigitizingImage Data
Structural Lighting Technique.
Use of multiple light source.
Use polarized light.
Redirected light to see top.
Different colored light.
Slight color differences,
Presence or absence of oil films,
More complex part recognition
Task.
30.
Sensing and DigitizingImage Data
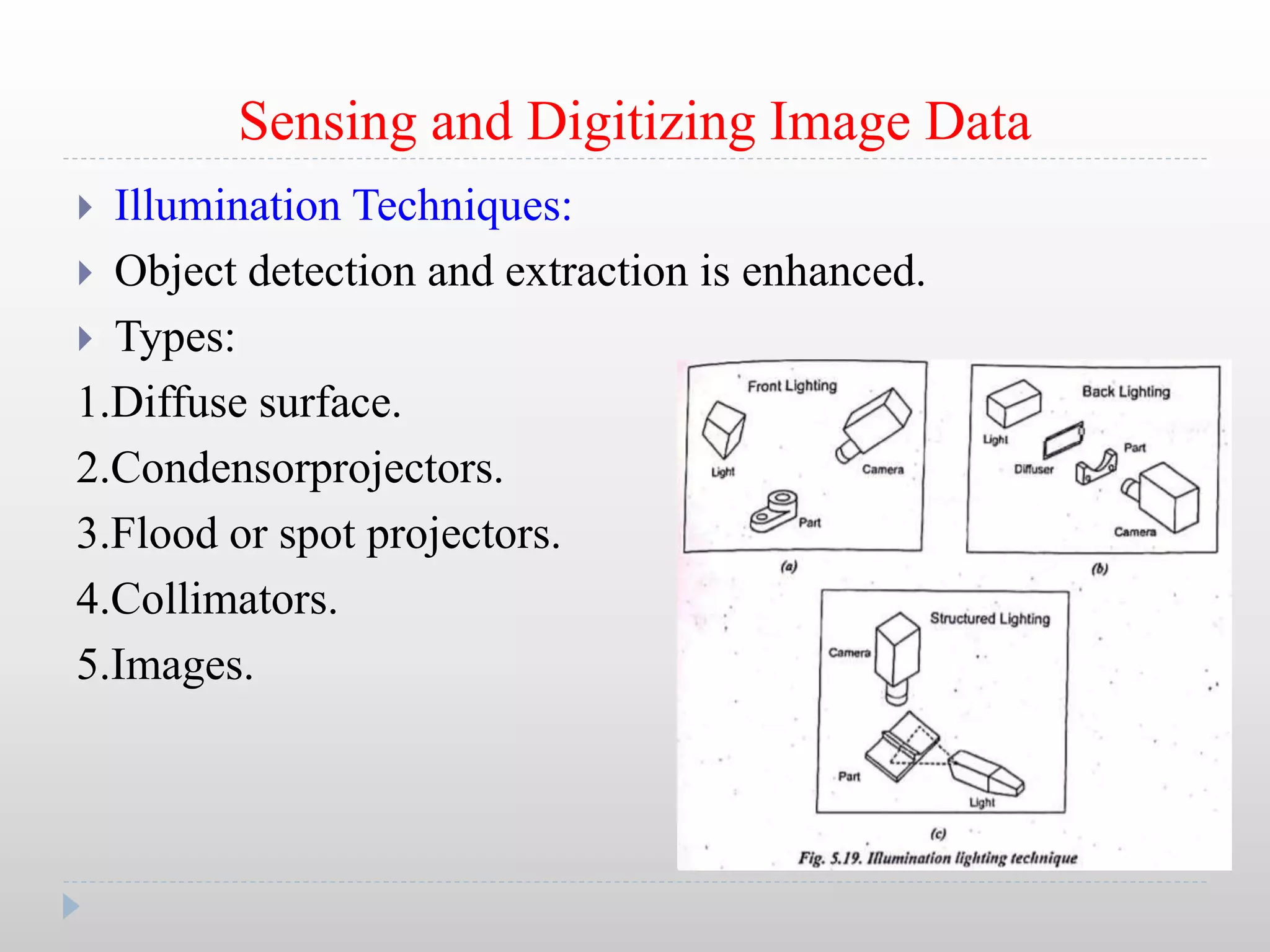
Illumination Techniques:
Object detection and extraction is enhanced.
Types:
1.Diffuse surface.
2.Condensorprojectors.
3.Flood or spot projectors.
4.Collimators.
5.Images.
31.
Sensing and DigitizingImage Data
Illumination Techniques:
1.Back Light:
Detecting presence or
Absence of holes and gaps
Part placement or
Orientation for measuring
Objects.
Image Processing andAnalysis
Which is used to enhance or otherwise alter an image and
to prepare it for image analysis.
Not extracted from the image.
Image Data reduction:
Is to reduce the volume of data.
Windowing:
Windowing involves using only a portion of the total
image stored in the frame buffer for image processing and
analysis.
Digital Conversion:
Digital conversion reduces the number of grey levels used
by the machine vision system.
37.
Image Processing andAnalysis
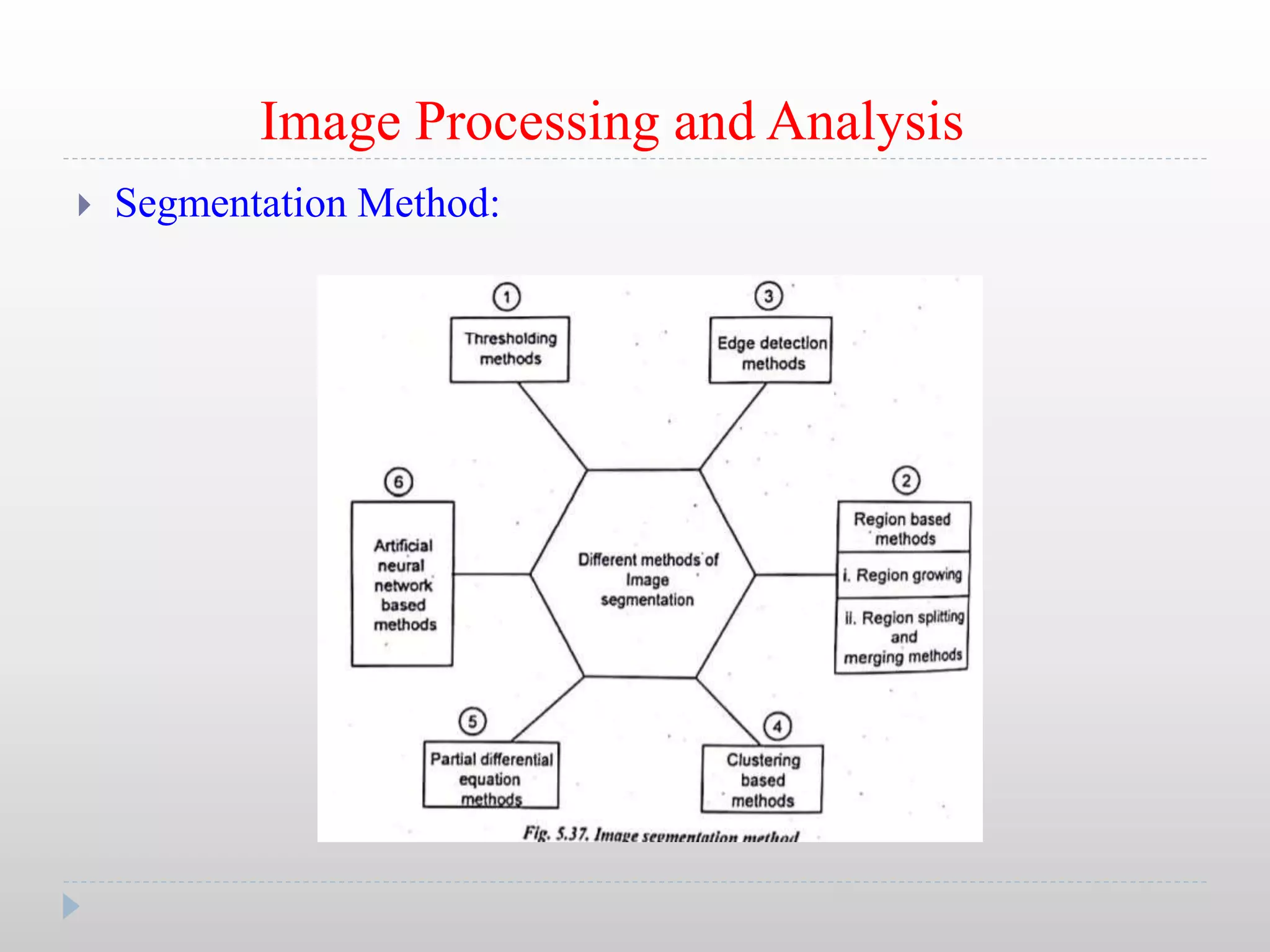
Segmentation:
Is the separation of one or more region or objects is an
image based on a discontinuous or similar criterion.
Purpose is to convert images in to smaller entities.
Example: boundaries or origiones
Segmentation Techniques:
Structural Segmentation Technique
Stochastic Segmentation Technique
Hybrid Technique
Image Processing andAnalysis
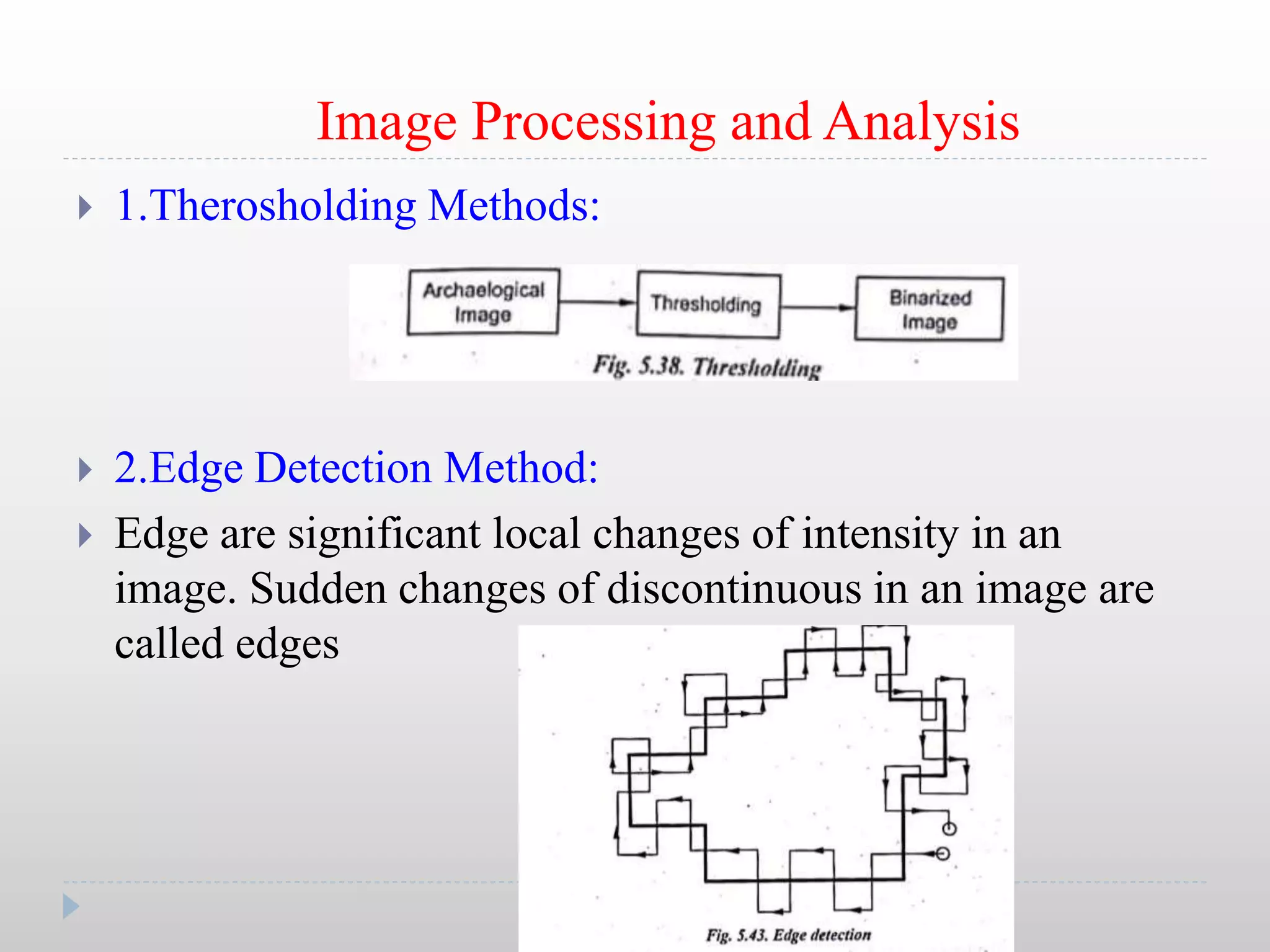
1.Therosholding Methods:
2.Edge Detection Method:
Edge are significant local changes of intensity in an
image. Sudden changes of discontinuous in an image are
called edges
40.
Image Processing andAnalysis
3.Region Based Methods:
Main purpose to use is to partition an image into regions.
Boundaries between regions based on discontinuous in
grey levels or color properties.
41.
Image Processing andAnalysis
4.Clustering based Methods:
It is based on division into homogenous clusters.
Which used to convert image into clusters having pixels
with similar characteristics.
Types:
1.Hard Clustering 2.Soft Clustering.
5.Partial differential equations:
Non linear isotropic diffusion filter is used to enhance edges.
It is an time critical application.
Faster method.
Better detect the edges and boundaries.
42.
Image Processing andAnalysis
6.Artificial Neural network based methods:
Simulate the learning strategies of human brain for the
purpose of decision making.
In this the problem is converted to issues which are solved
using neural network.
No need to write complex programs.
FEATURE EXTRACTION:
To determine the features based on the area and
boundaries of the object by using thresholding and Edge
detection.
Feature extraction actually transform the attributes.
43.
Image Processing andAnalysis
FEATURE EXTRACTION:
Geometry:
1.Size 2.Shape 3.Colour 4.Coimbination of them.
Machine vision include area, diameter and perimeter can be
used to measure.
Extract features values for two dimensional cases.
Example: Character recognization.
Discard redundant information.
A 64 * 64 images 4096 dimensional feature space.
Used to enhance speed effectiveness of supervised learning.
Used to extract the themes of document collections.
44.
Image Processing andAnalysis
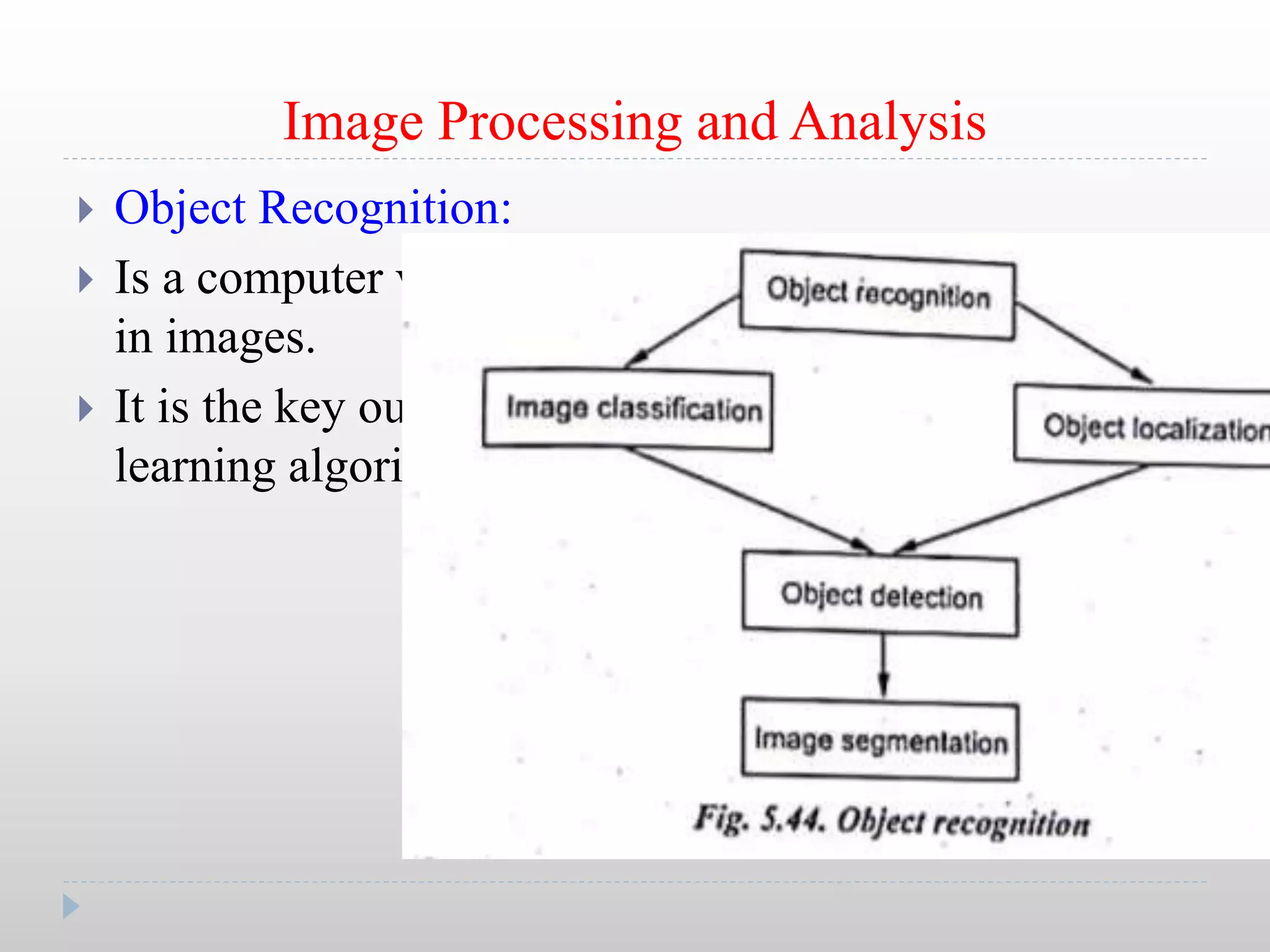
Object Recognition:
Is a computer vision technique for identifying objects
in images.
It is the key output of deep learning and machine
learning algorithms.
45.
Image Processing andAnalysis
Template matching technique:
Which is used to finding small parts of an image.
Templates are frequently used for recognition characteristics, numbers, objects.
It can pixel to pixel to pixel matching or features based.
Similarly
Feature detection technique:
Most features are based on either regions or boundaries in an image.
It is assumed that region or a closed boundary corresponds to an entity that is either
an object or a part of an object.
Application:
Robotics
Biometric recognition
Medical analysis
Intelligent vehicle system.
Industrial inspection.
Survelliance.
Driver less cars.
Image Processing andAnalysis
Pattern Recognition:
Recognition=Re+cognition
Cognition means act or the process of knowing an entity.
A pattern is an object ,process or event.
A class is a set of patterns that share common attributes
usually from the same information source.
Recognition classes are assigned to the objects.
48.
Image Processing andAnalysis
Histogram:
It makes task easier to identify different data.
It helps to visualize the distribution of the data.
It is like drawn like a bar chart. But often has bars of
unequal widths.
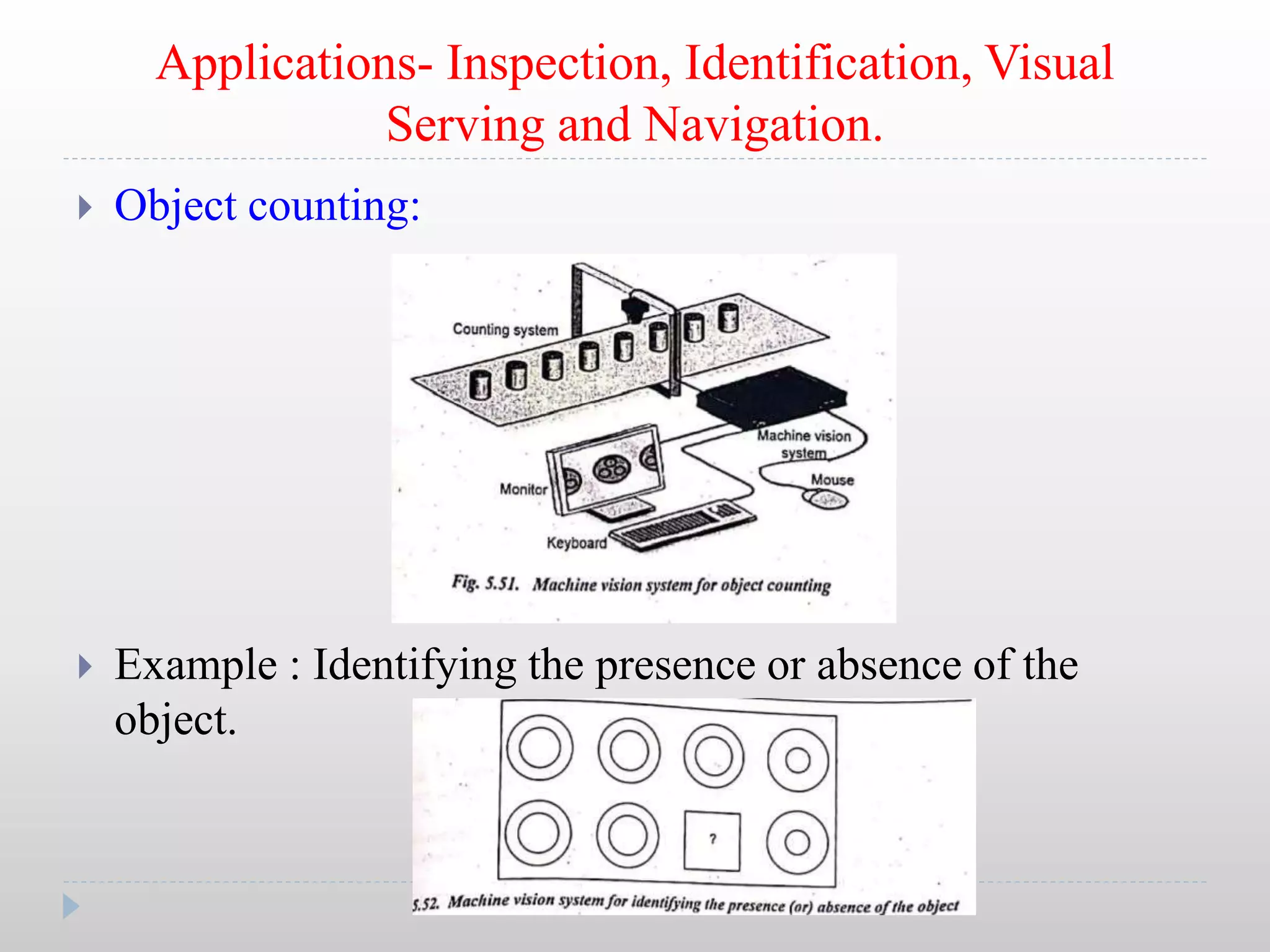
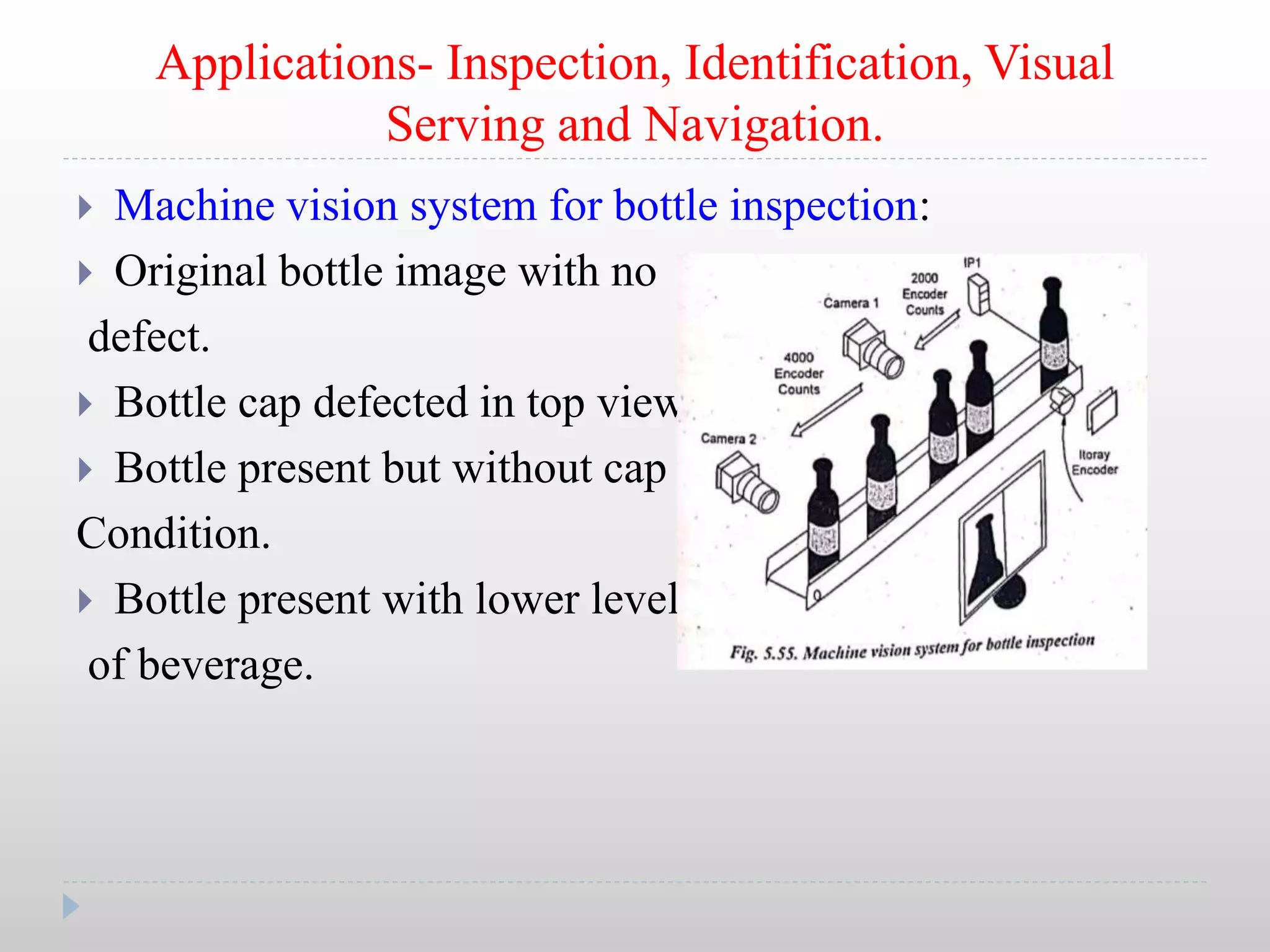
Applications- Inspection, Identification,Visual
Serving and Navigation.
Machine vision system for bottle inspection:
Original bottle image with no
defect.
Bottle cap defected in top view.
Bottle present but without cap
Condition.
Bottle present with lower level
of beverage.










![Frame Grabber
A frame grabber is a device to acquire [grab] and convert
analog to digital images. Modern FG have many additional
features like more storage, multiple cam
Its play a crucial role in the capture of high resolution, high
quality image in a variety of setting.
Smart camera are capable
of capture digital still
image without the uses
of a frame grabber.
Smart camera capture still
images for low end application.
Mega pixels resolution of
cameras used.](https://image.slidesharecdn.com/unit3machinevision1-211108072553/75/Unit-3-machine-vision-18-2048.jpg)






![Sensing and Digitizing Image Data
II. Image Storage/ frame grabber.
A frame grabber is a device to acquire [grab] and convert
analog to digital images. Modern FG have many additional
features like more storage, multiple cam
Its play a crucial role in the capture of high resolution, high
quality image in a variety of setting.
III. Lighting Structured
Machine vision system creates images by analyzing the
reflected light from an object, not by analyzing the object itself.
Types:
Structural Lighting Technique.
Illumination Technique.](https://image.slidesharecdn.com/unit3machinevision1-211108072553/75/Unit-3-machine-vision-28-2048.jpg)