This document provides an introduction to mechatronics systems. It discusses key concepts including the definition of mechatronics as the synergistic combination of mechanics, electronics, and control engineering. The document also outlines the key elements of mechatronics such as information systems, electrical systems, sensors, actuators, computer systems, and real-time interfacing. It describes open-loop and closed-loop control systems as well as continuous-time and discrete-time systems. Finally, it compares the traditional approach to engineering design with the mechatronics approach.
Module 1-Introduction
Lecture 1of 4 –Introduction to
Mechatronics System
Prepared by
Mr.M.Mani Vannan
Assistant Professor
Department of Mechanical Engineering
1
2.
UNIT I INTRODUCTION
Introductionto Mechatronics – Systems – Concepts of
Mechatronics approach – Need for Mechatronics – Emerging
areas of Mechatronics – Classification of Mechatronics. Sensors
and Transducers: Static and dynamic Characteristics of Sensor,
Potentiometers – LVDT- Capacitance sensors – Strain gauges –
Eddy current sensor – Hall effect sensor – Temperature sensors –
Light sensors.
2
3.
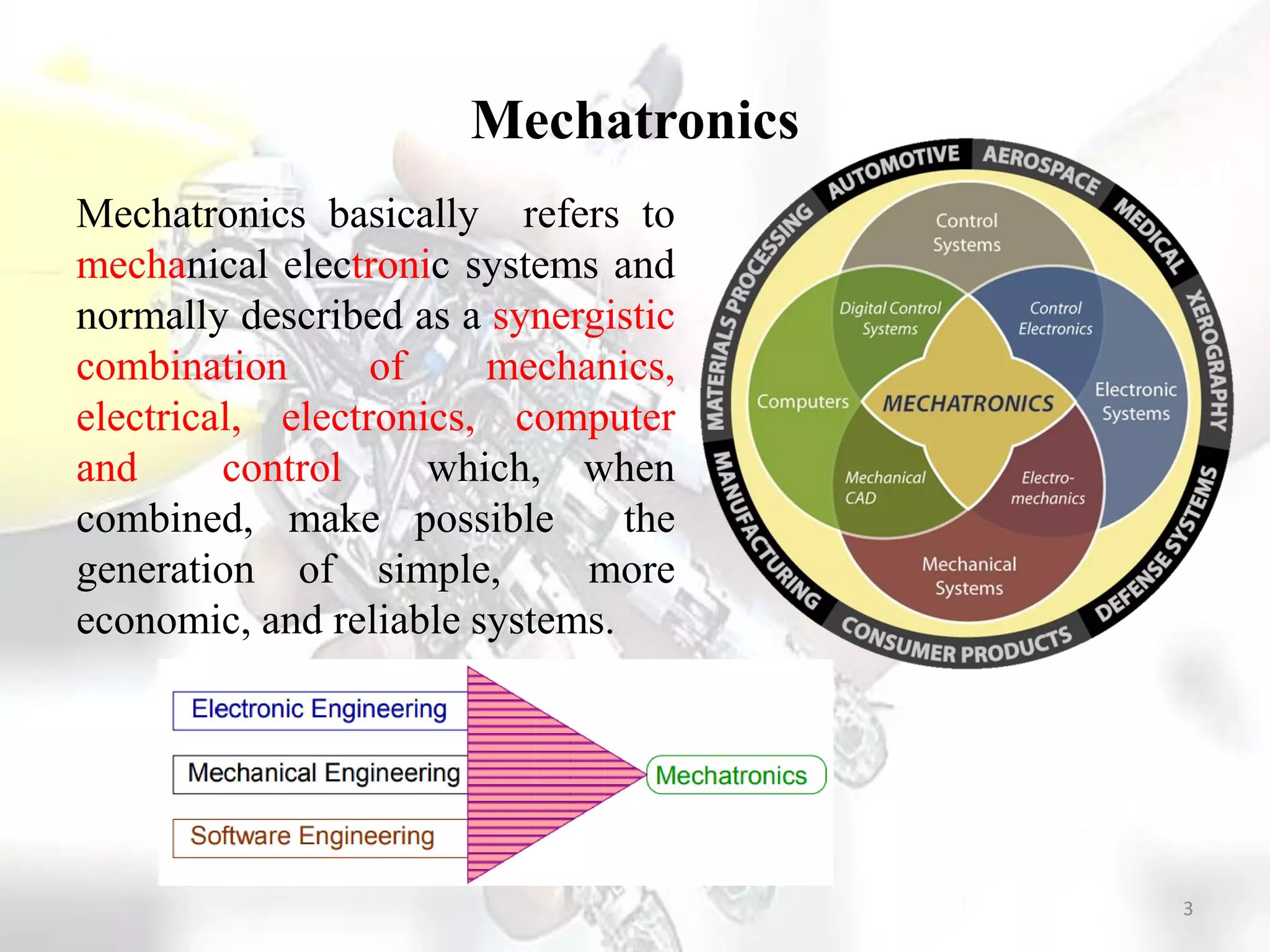
Mechatronics
Mechatronics basically refersto
mechanical electronic systems and
normally described as a synergistic
combination of mechanics,
electrical, electronics, computer
and control which, when
combined, make possible the
generation of simple, more
economic, and reliable systems.
3
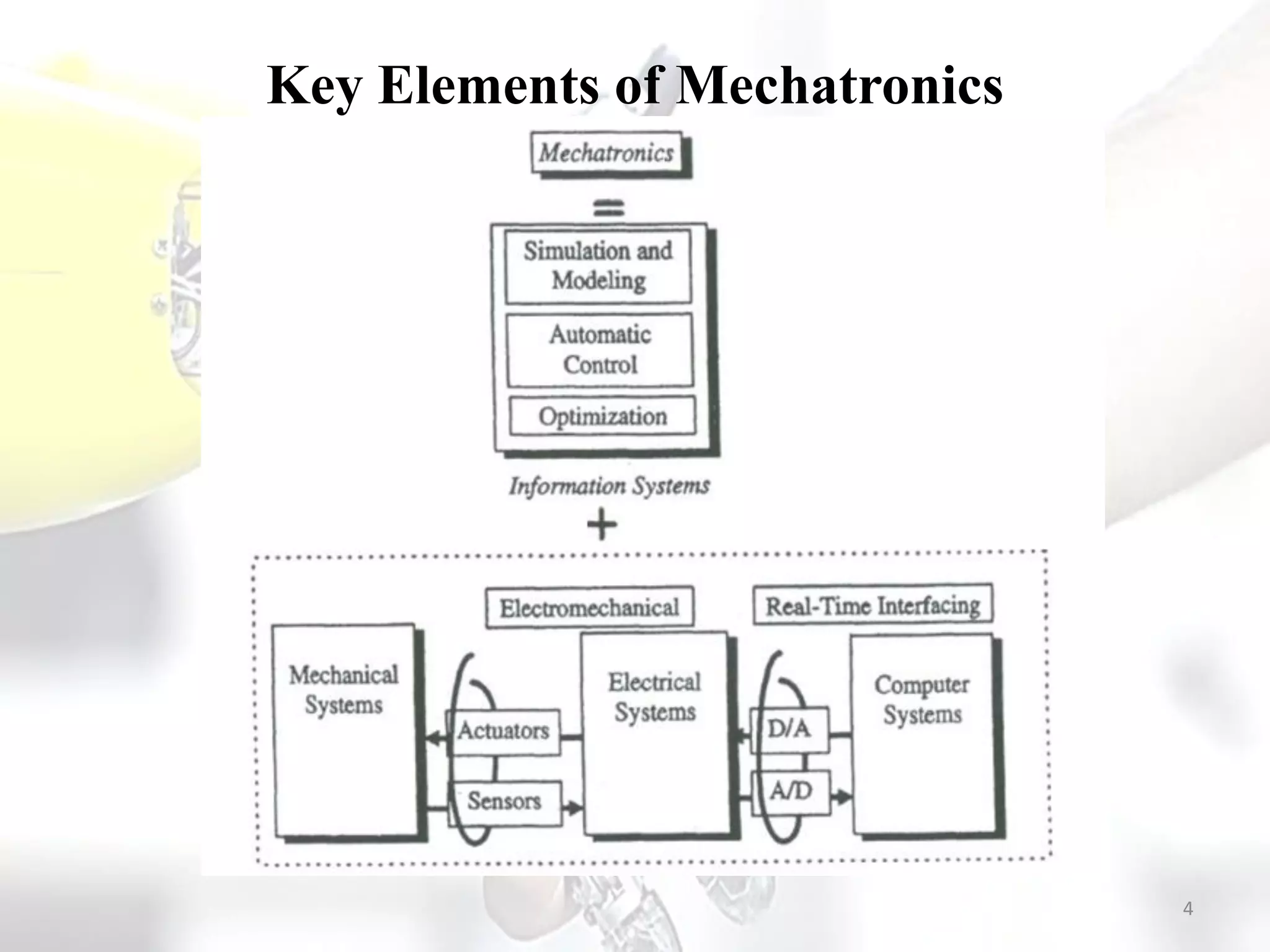
1-Information Systems
a -Modeling and Simulation
Modeling is the process of representing the behavior of a
real system by a collection of mathematical equations and logic.
Simulation is the process of solving the model and it is
performed on a computer. The process of simulation can be
divided into three sections:
1.Initialization,
2.Iteration, and
3.Termination
5
6.
1-Information Systems
c -Optimization
Optimization solves the problem of distributing limited
resources throughout a system such that pre specified aspects of
its behavior are satisfied.
It is applied to:
1.Establish the optimal system configuration
2.Identification of optimal trajectories
3.Control system design
4.Identification of model parameters
6
7.
2- Electrical Systems
Thefollowing electrical components are frequently used:
- Motors and generators
- Transducers
- Solid state devices including computers
-Circuits (signal conditioning, impedance matching,
amplifiers…)
-Contact devices (relays, circuit breakers, switches…)
7
8.
3-Sensors
Sensors are requiredto monitor the performance of
machines and processes.
Some of the more common measurement variables in
mechatronics systems are temperature, speed, position, force,
torque, and acceleration.
The characteristics that are important when one is
measuring these variables include the dynamics of the sensor,
stability, resolution, precision, robustness, size, and signal
processing.
8
9.
4- Actuators
Actuation involvesa physical acting on the process, such
as the ejection of a workpiece from a conveyor system initiated
by a sensor. Actuators are usually electrical, mechanical, fluid
power or pneumatic based. They transform electrical inputs into
mechanical outputs such as force, angle, and position.
Actuators can be classified into three general groups.
-Electromagnetic actuators, (e.g., AC and DC electrical
motors, stepper motors, electromagnets)
-Fluid power actuators, (e.g., hydraulics, pneumatics)
- Unconventional actuators (e.g., piezoelectric,
magnetostrictive, memory metal)
9
10.
5- Computer Systems
Computersystem hardware is usually restricted to
computer-specific circuits and devices. These include logic
networks, flip flops, counters, timers, triggers, integrated
circuits, and microprocessors.
-Assembly language was the first step toward a higher-
Ievel language
-For more powerful (higher-level) programming
languages to be used, compilers were developed. Some of the
most well-known high-level languages are BASIC, FORTRAN,
C, and Pascal.
-Visual languages, including Matrixx, EasyS, SimuLink,
VisSim, and LabView.
10
11.
6- Real-Time Interfacing
Itis process of fusing and synchronizing model, sensor,
and actuator information is called real- time interfacing or
hardware-in-the-loop simulation.
For mechatronics applications real-time interfacing
includes analog to digital (A/D) and digital to analog (D/ A)
conversion, analog signal conditioning circuits, and sampling
theory.
The main purpose of the real-time interface system is to
provide data acquisition and control function for the computer.
11
12.
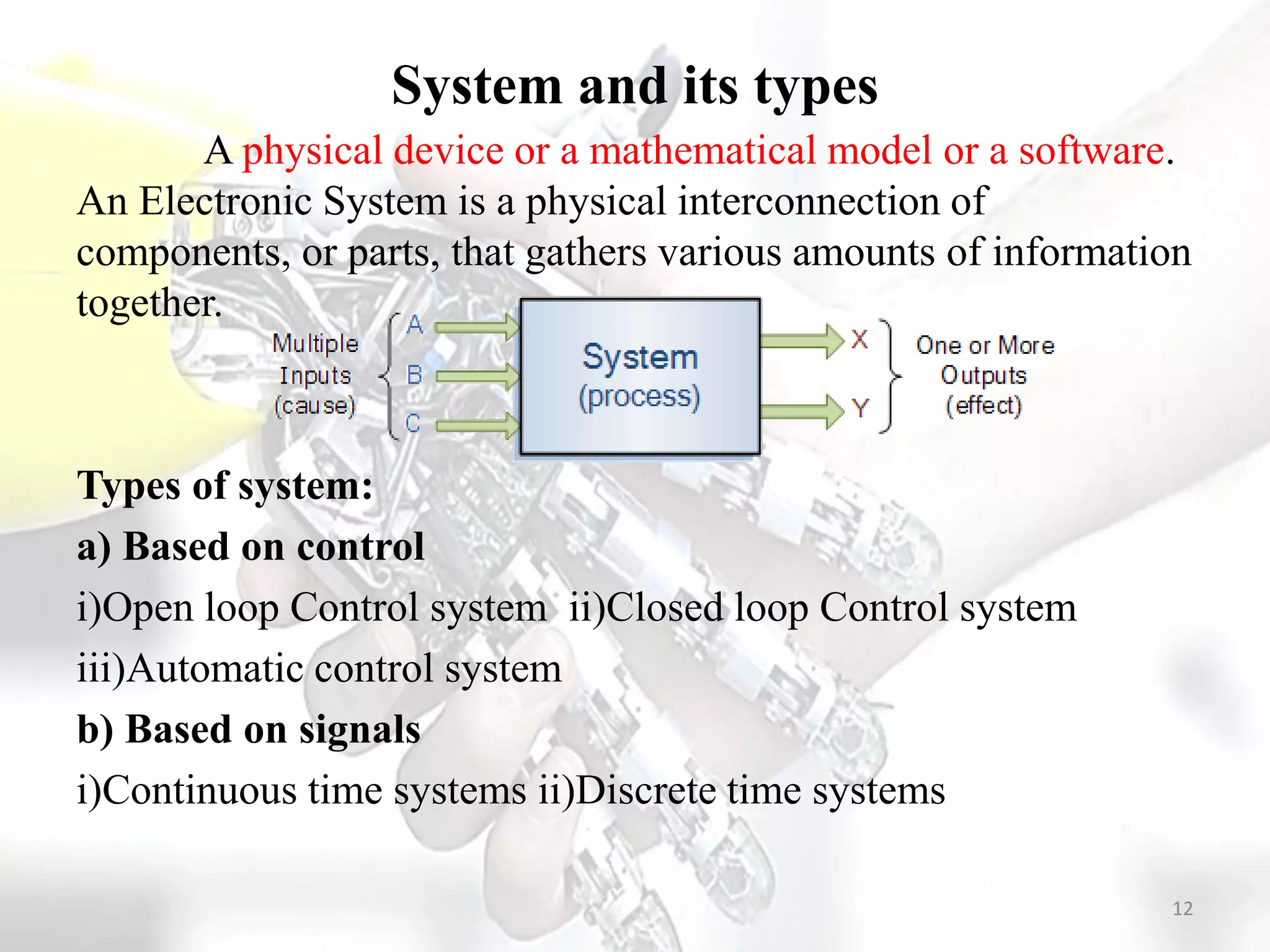
System and itstypes
A physical device or a mathematical model or a software.
An Electronic System is a physical interconnection of
components, or parts, that gathers various amounts of information
together.
Types of system:
a) Based on control
i)Open loop Control system ii)Closed loop Control system
iii)Automatic control system
b) Based on signals
i)Continuous time systems ii)Discrete time systems
12
13.
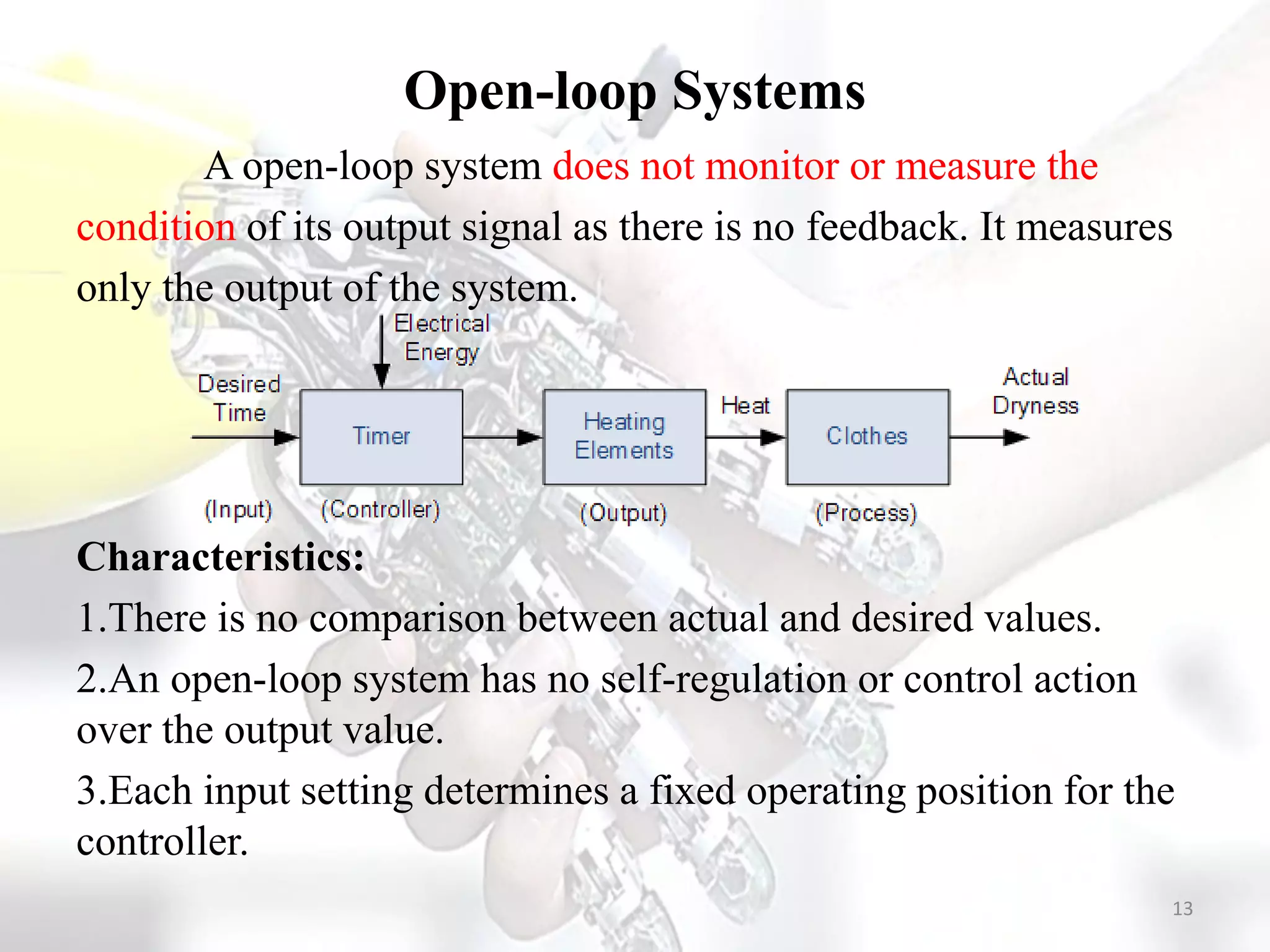
Open-loop Systems
A open-loopsystem does not monitor or measure the
condition of its output signal as there is no feedback. It measures
only the output of the system.
Characteristics:
1.There is no comparison between actual and desired values.
2.An open-loop system has no self-regulation or control action
over the output value.
3.Each input setting determines a fixed operating position for the
controller.
13
14.
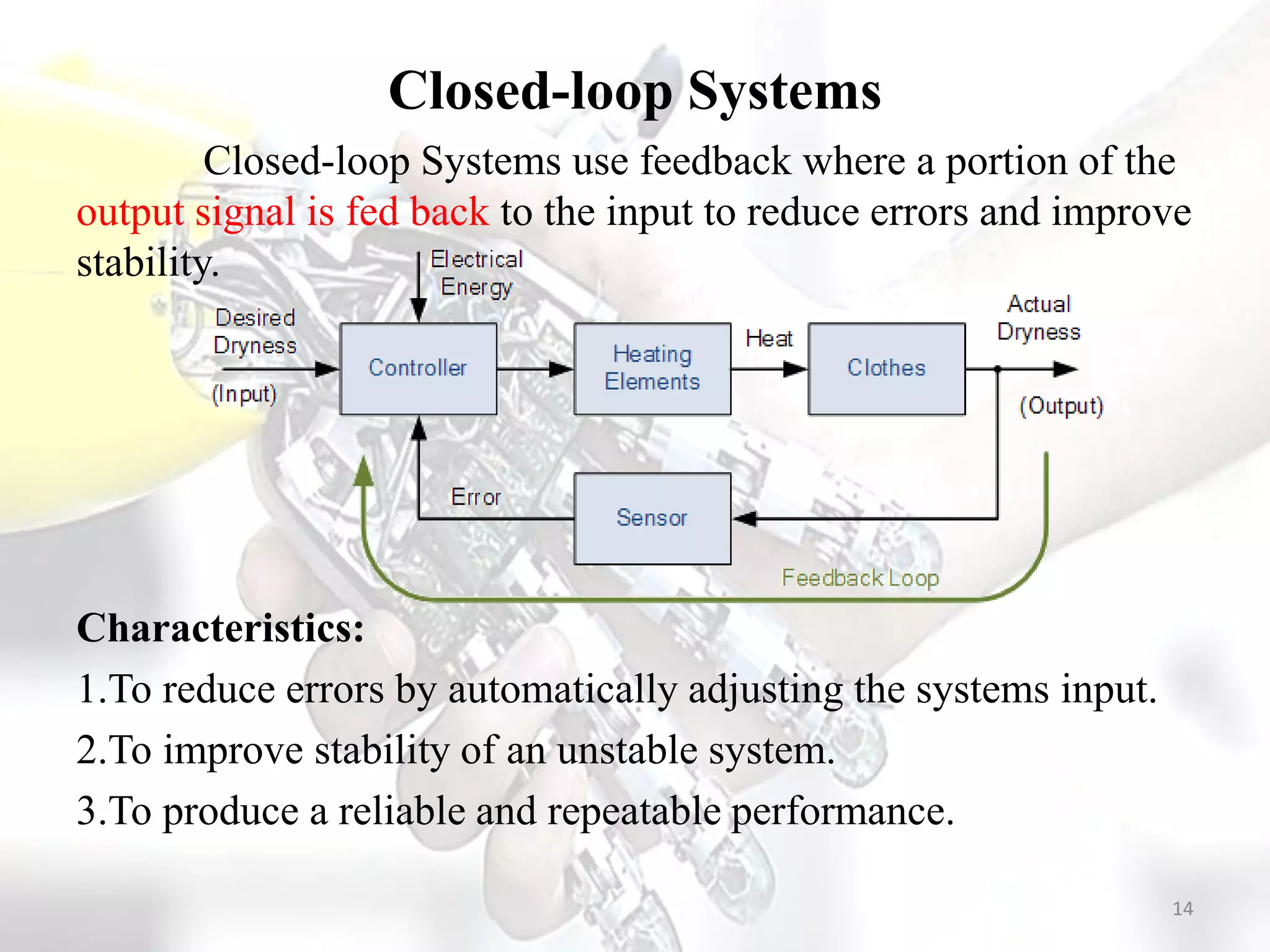
Closed-loop Systems
Closed-loop Systemsuse feedback where a portion of the
output signal is fed back to the input to reduce errors and improve
stability.
Characteristics:
1.To reduce errors by automatically adjusting the systems input.
2.To improve stability of an unstable system.
3.To produce a reliable and repeatable performance.
14
15.
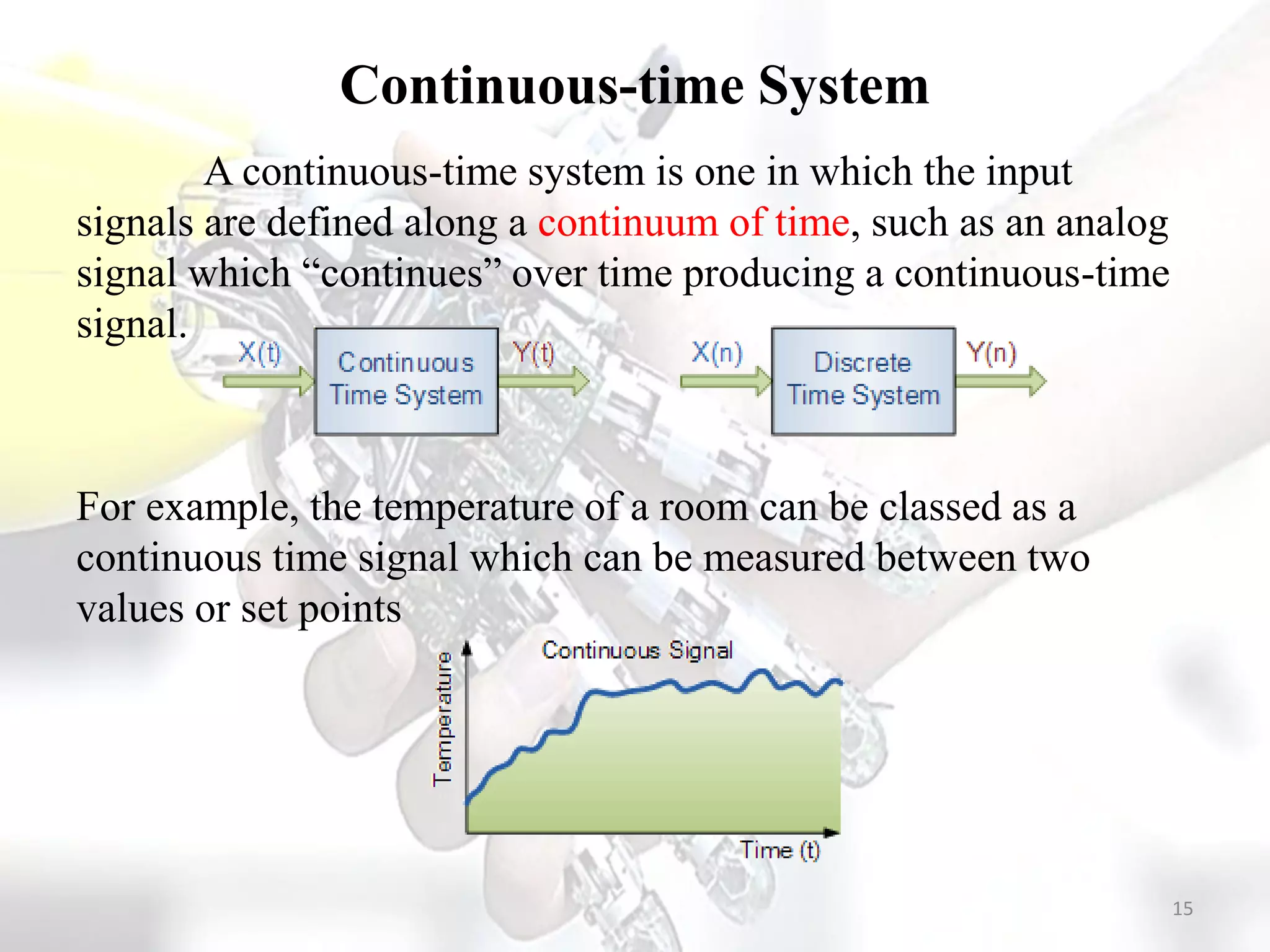
Continuous-time System
A continuous-timesystem is one in which the input
signals are defined along a continuum of time, such as an analog
signal which “continues” over time producing a continuous-time
signal.
For example, the temperature of a room can be classed as a
continuous time signal which can be measured between two
values or set points
15
16.
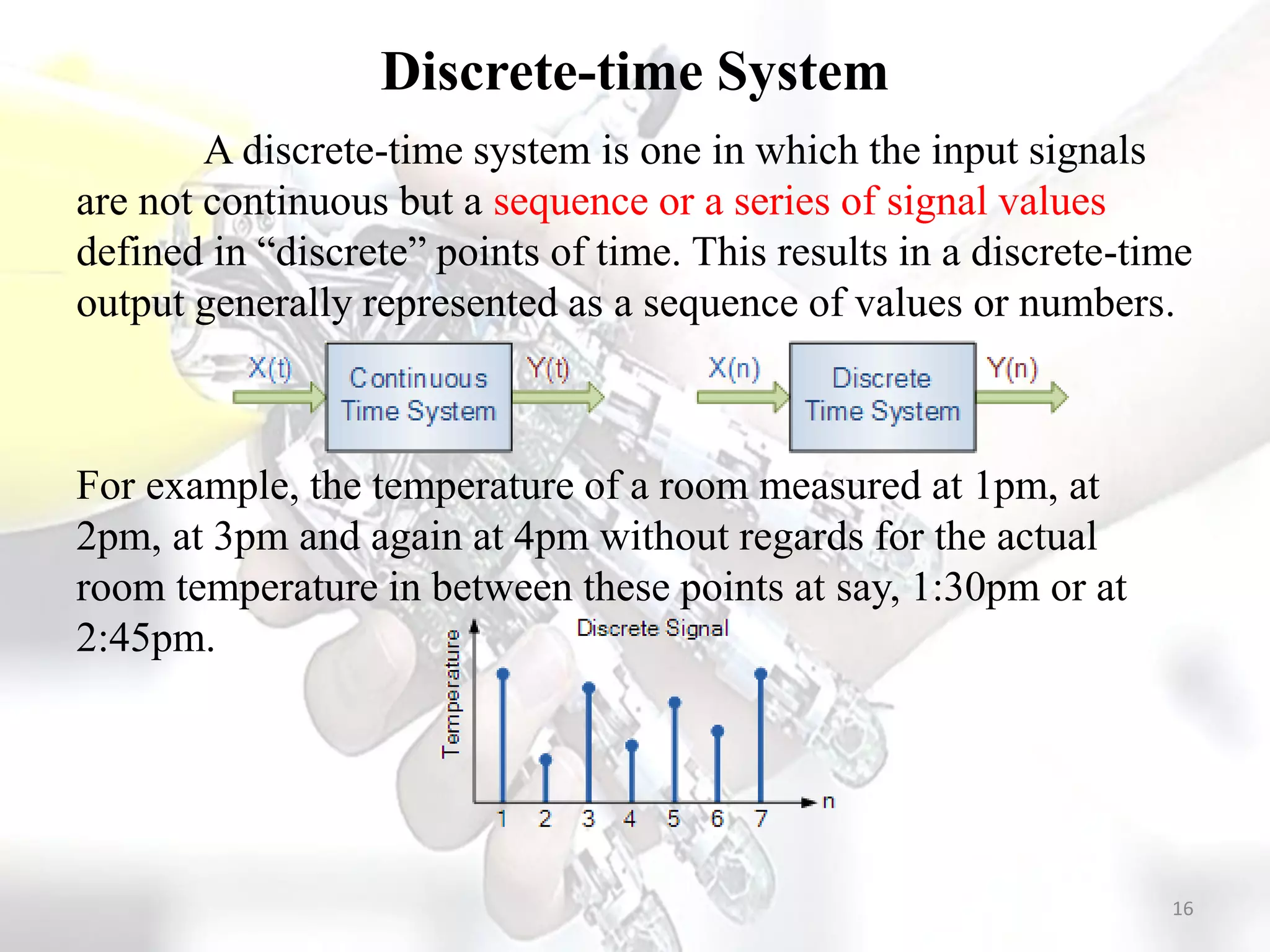
Discrete-time System
A discrete-timesystem is one in which the input signals
are not continuous but a sequence or a series of signal values
defined in “discrete” points of time. This results in a discrete-time
output generally represented as a sequence of values or numbers.
For example, the temperature of a room measured at 1pm, at
2pm, at 3pm and again at 4pm without regards for the actual
room temperature in between these points at say, 1:30pm or at
2:45pm.
16
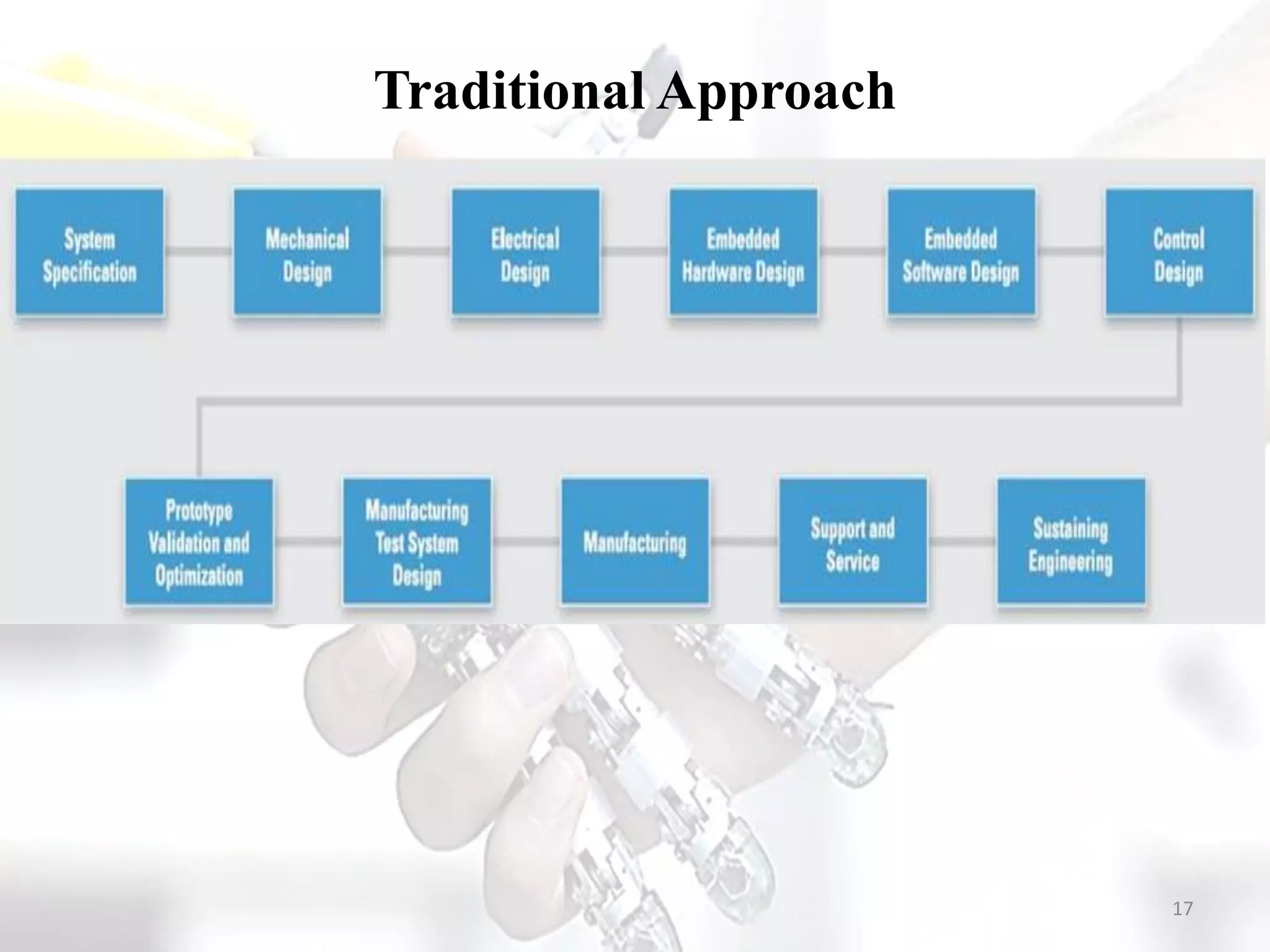
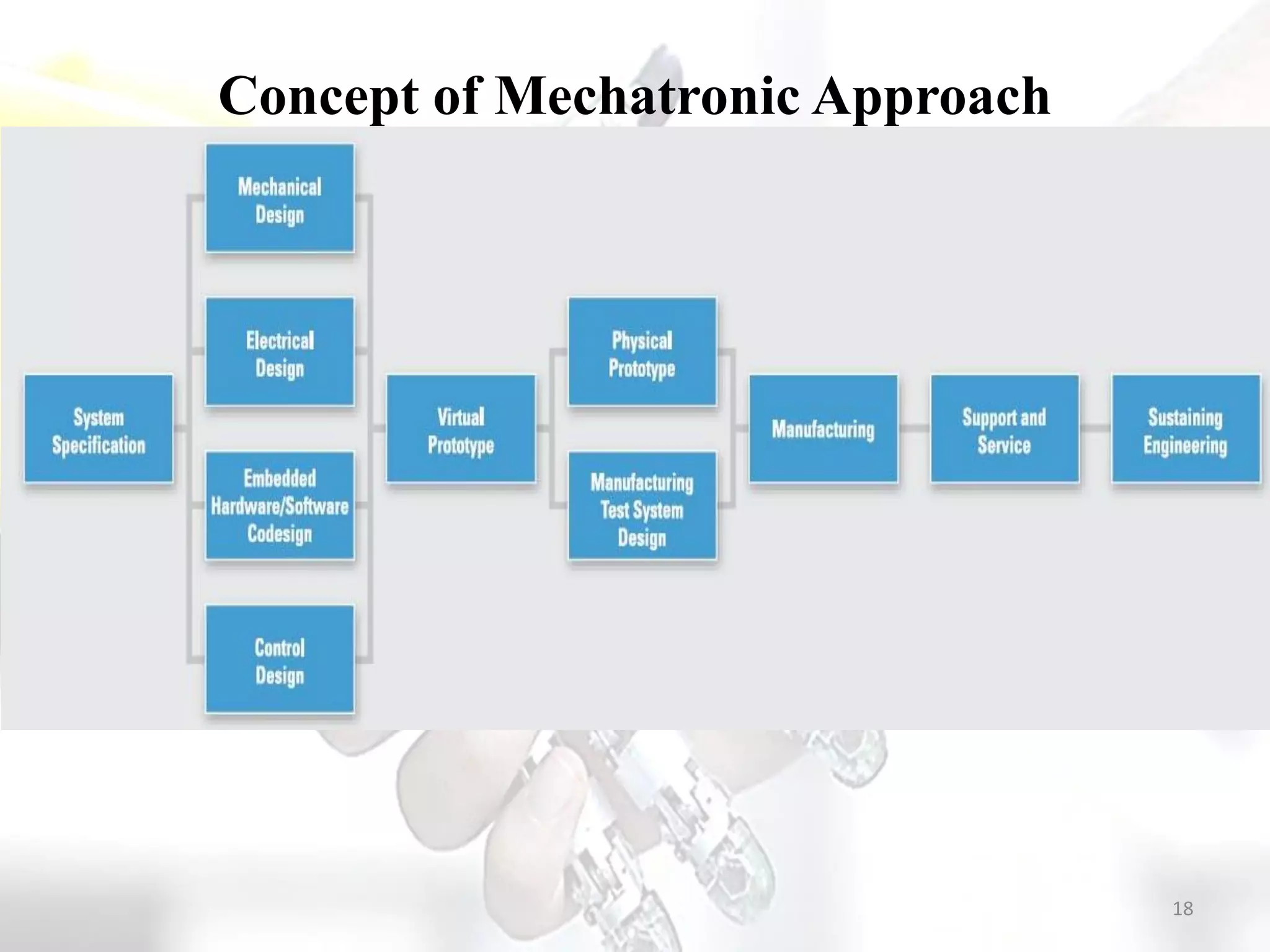
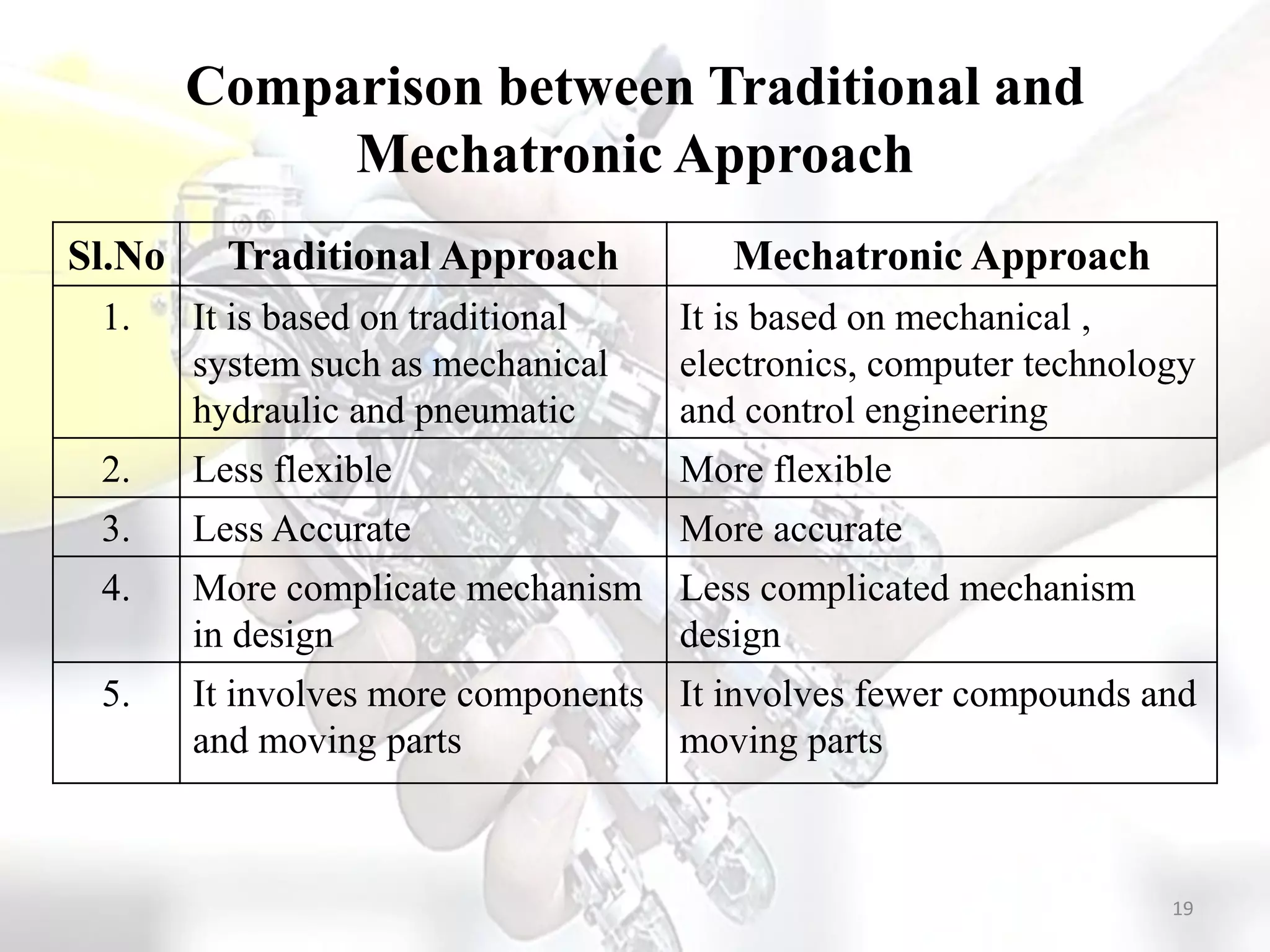
Comparison between Traditionaland
Mechatronic Approach
Sl.No Traditional Approach Mechatronic Approach
1. It is based on traditional
system such as mechanical
hydraulic and pneumatic
It is based on mechanical ,
electronics, computer technology
and control engineering
2. Less flexible More flexible
3. Less Accurate More accurate
4. More complicate mechanism
in design
Less complicated mechanism
design
5. It involves more components
and moving parts
It involves fewer compounds and
moving parts
19