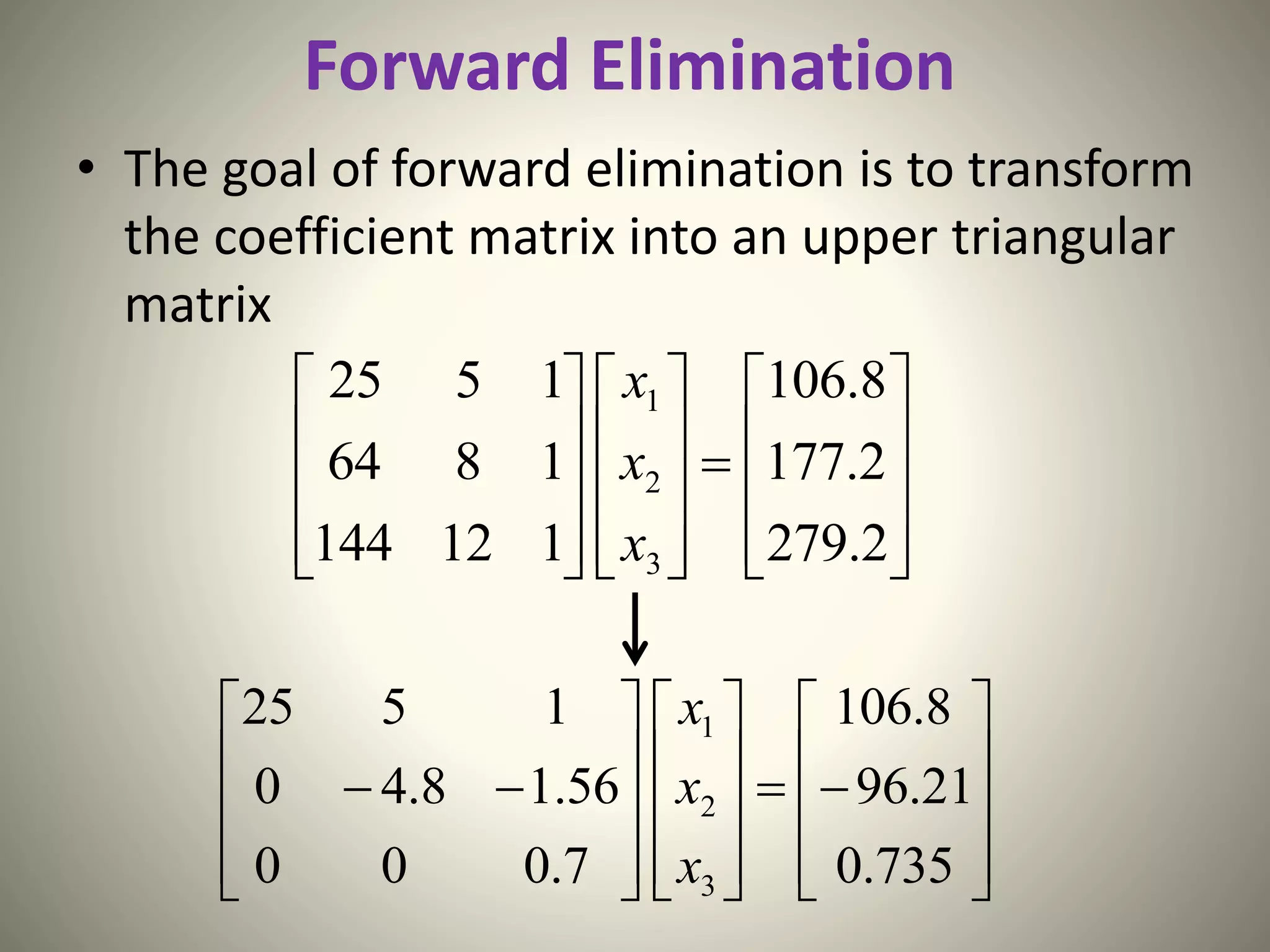
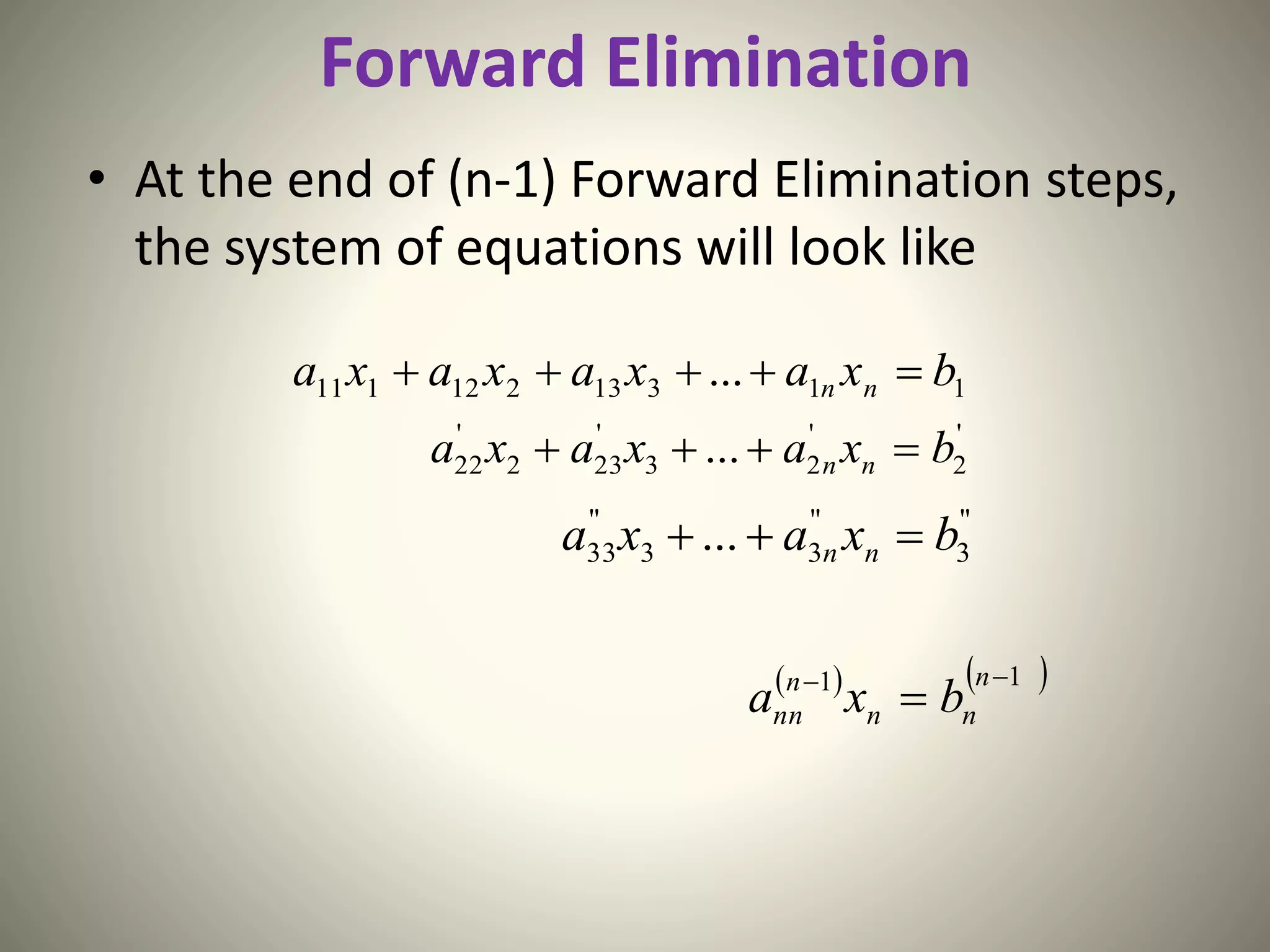
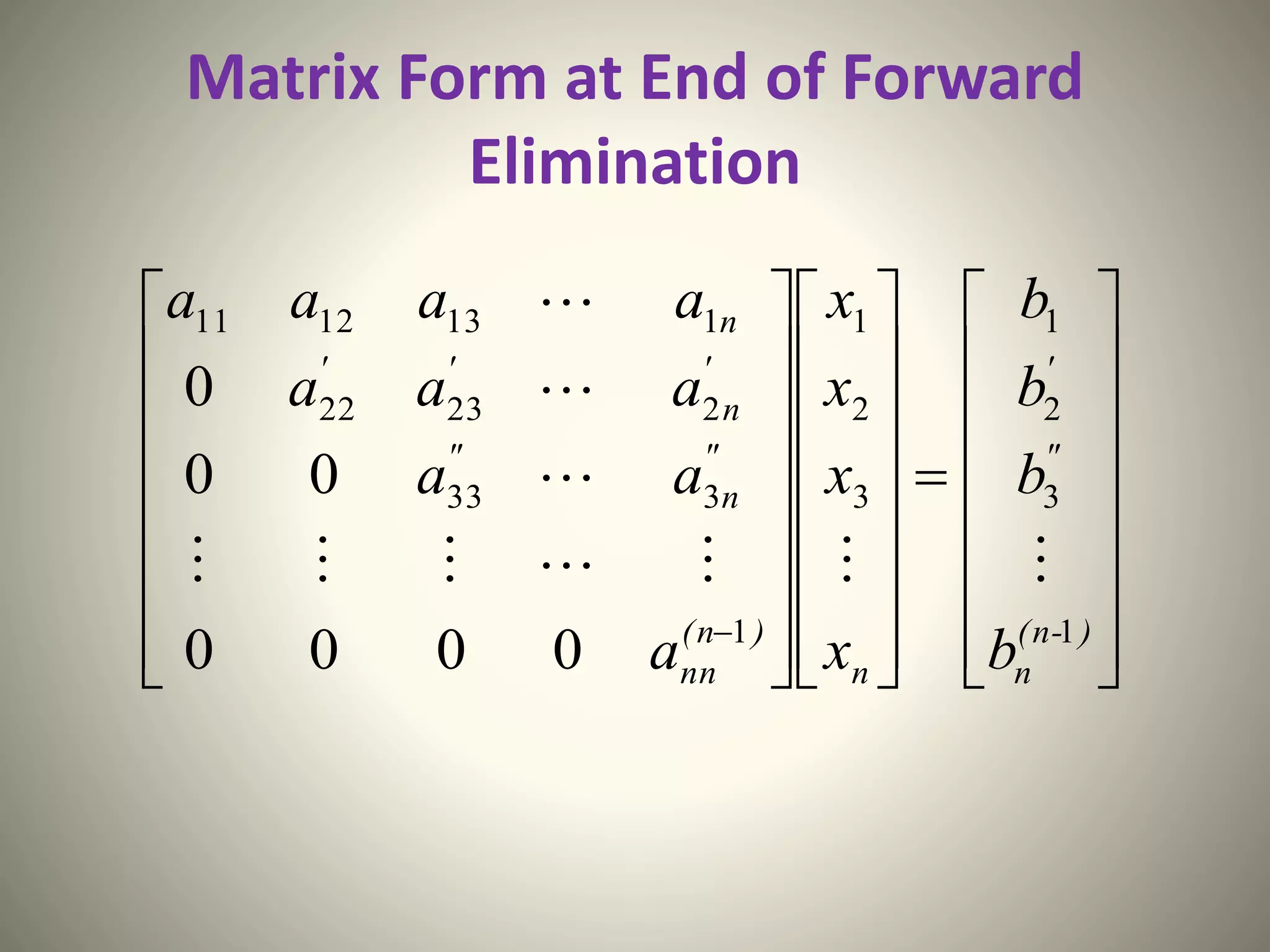
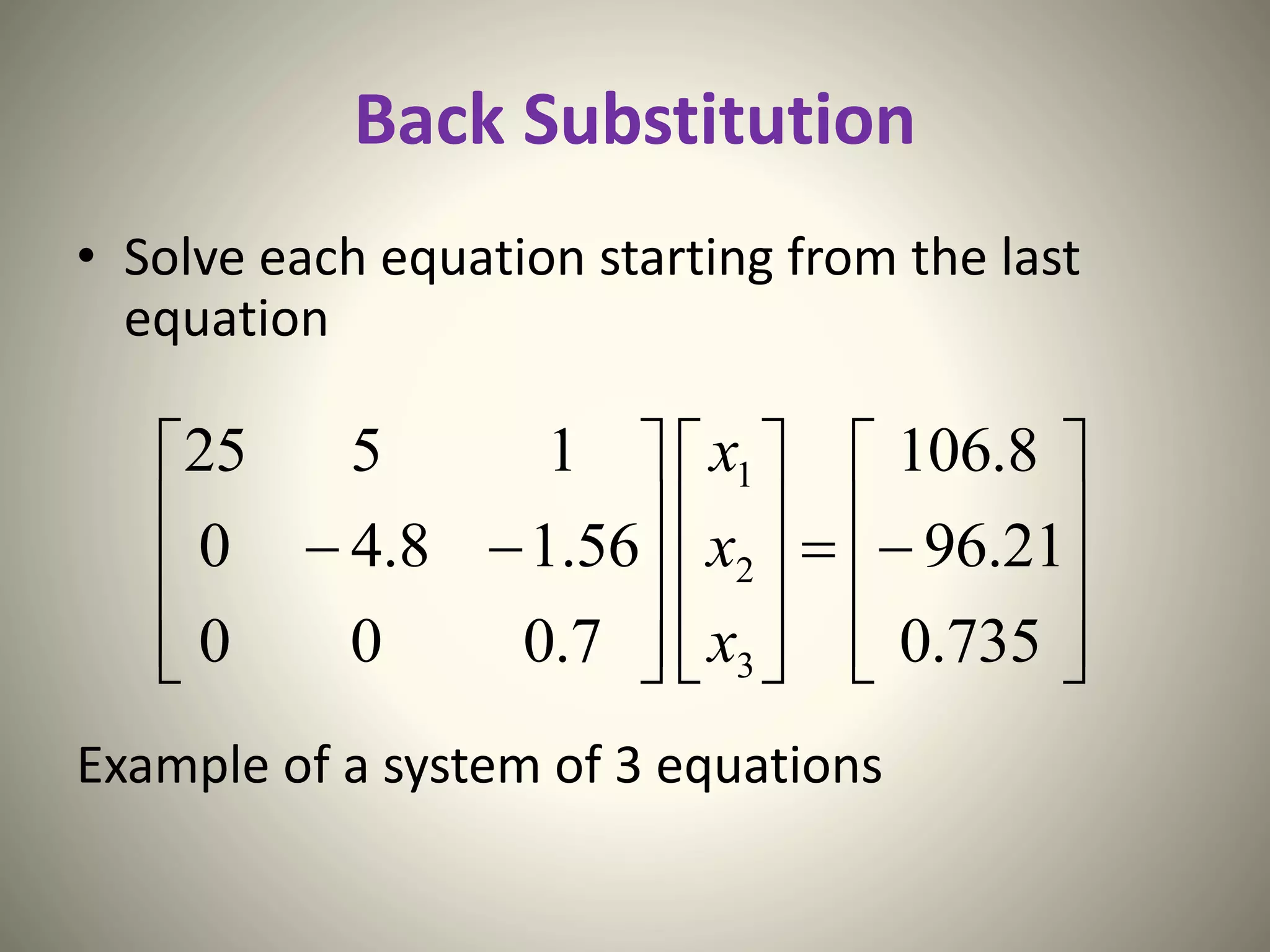
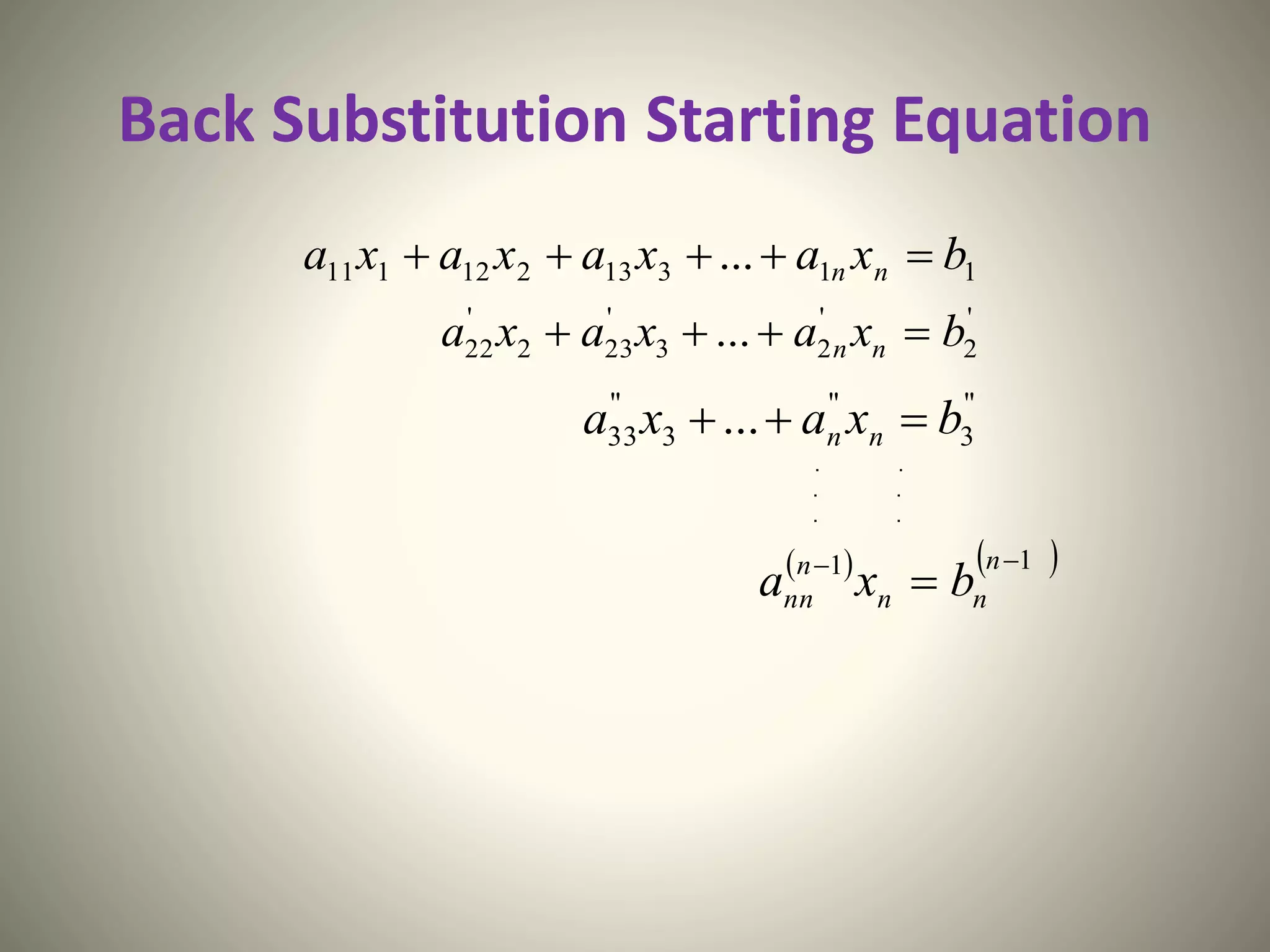
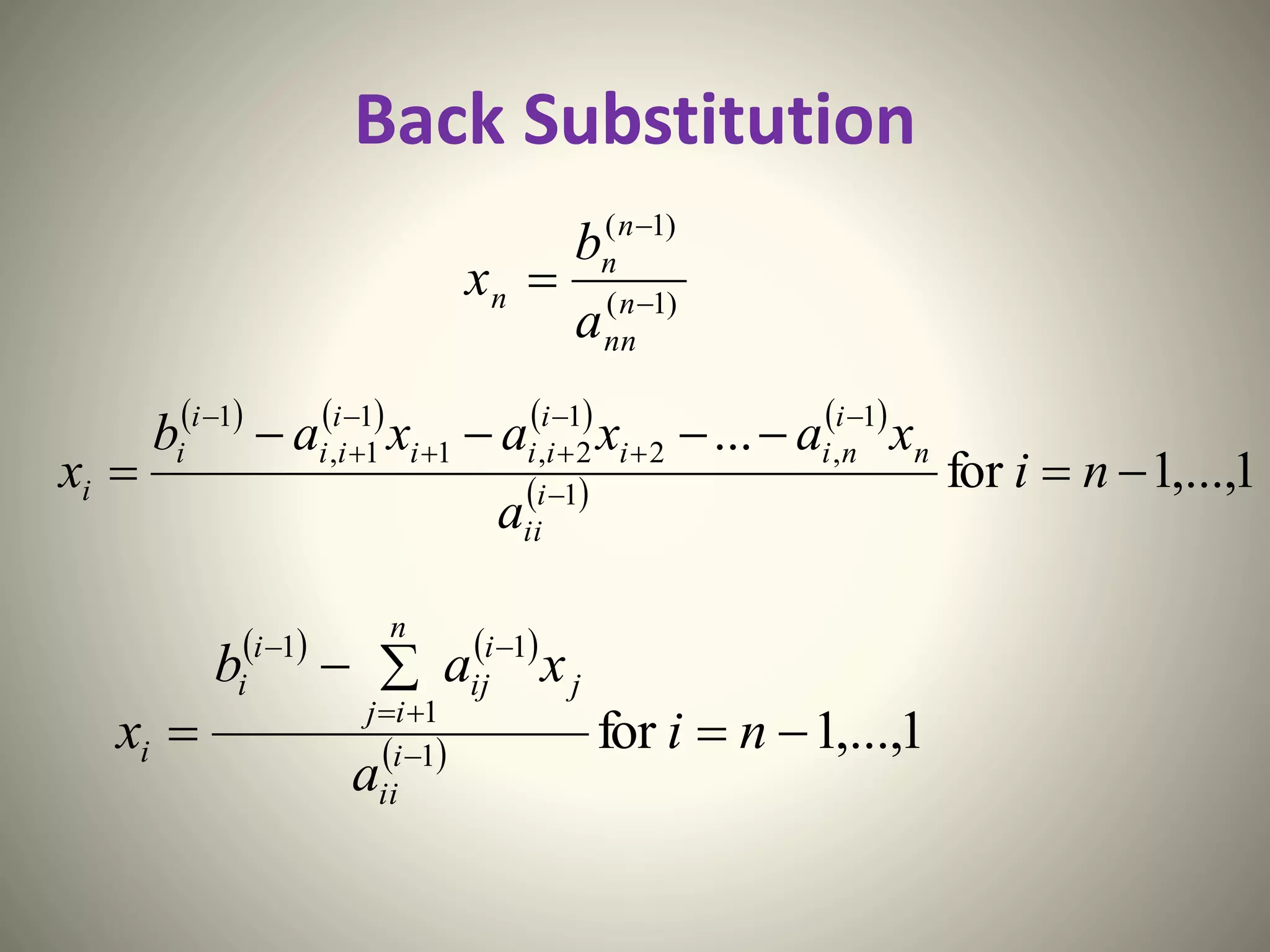
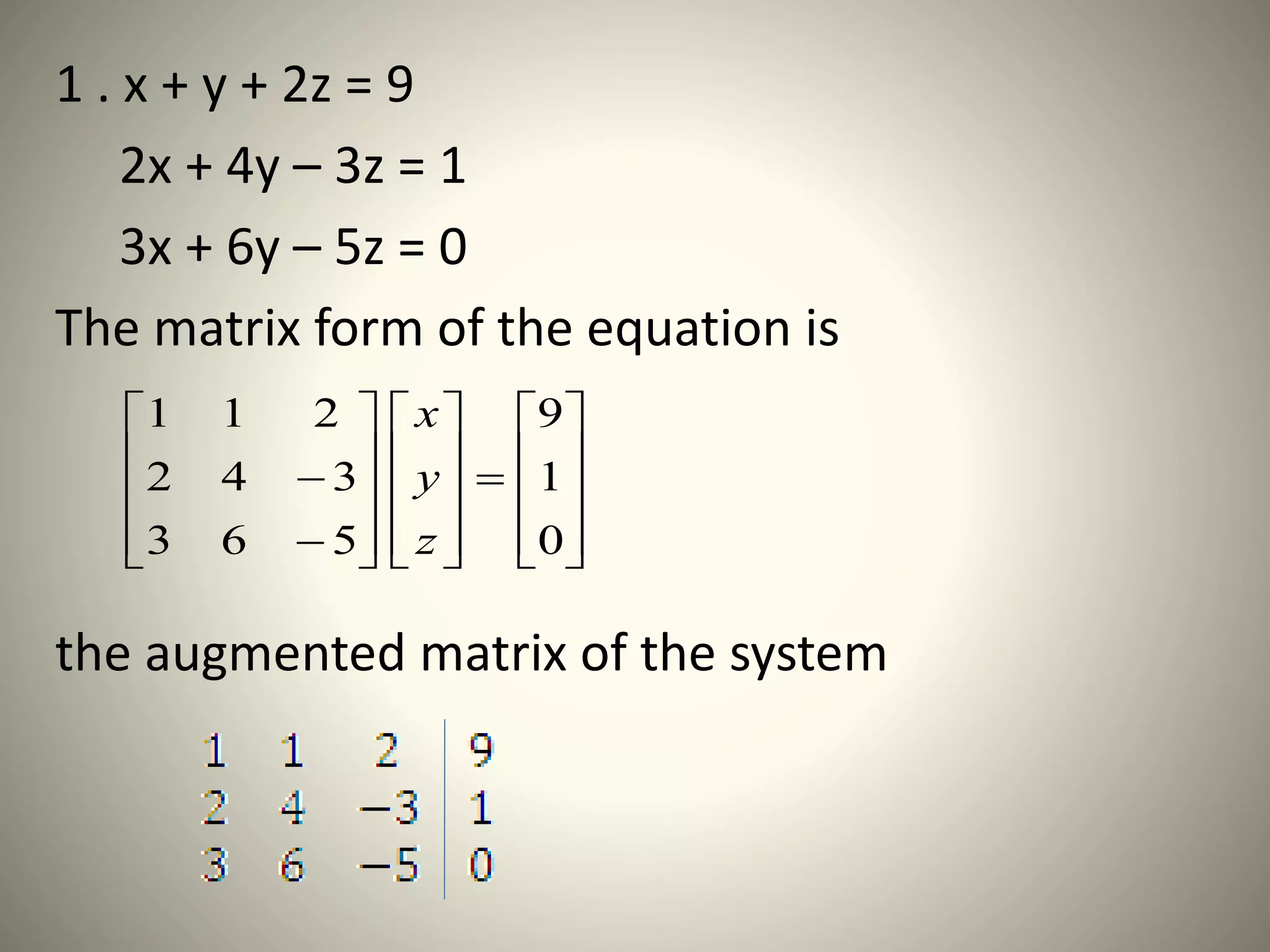
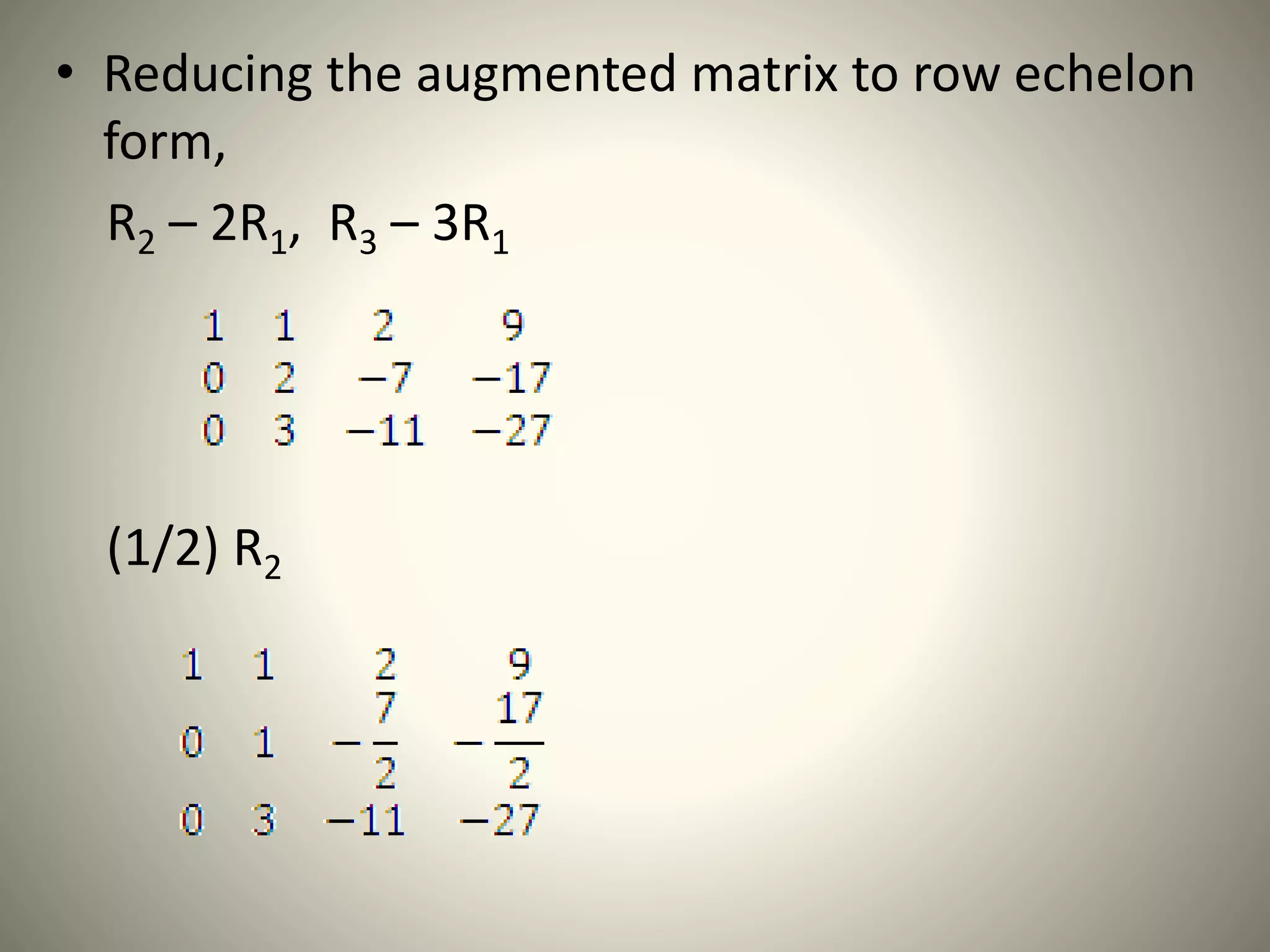
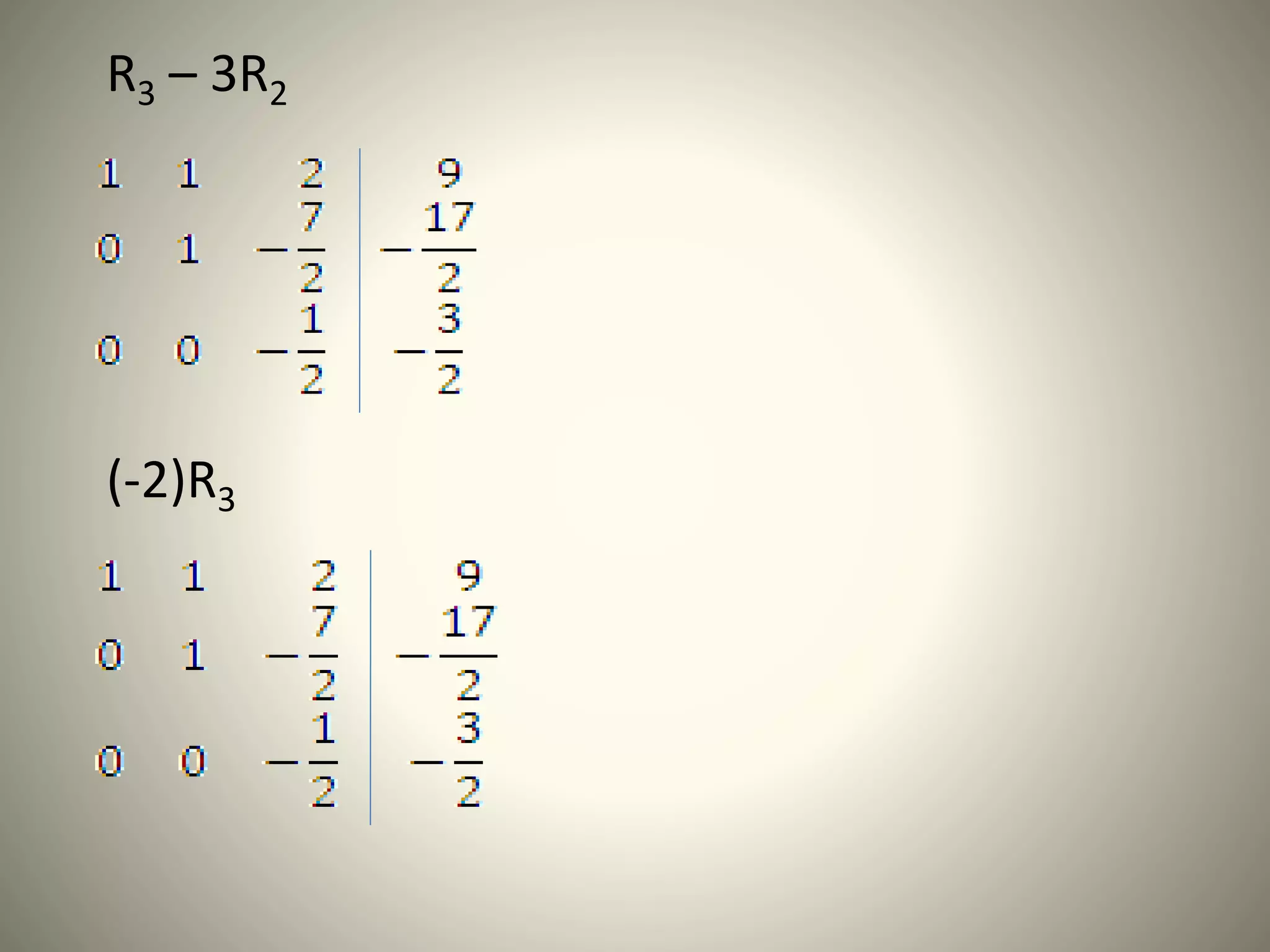
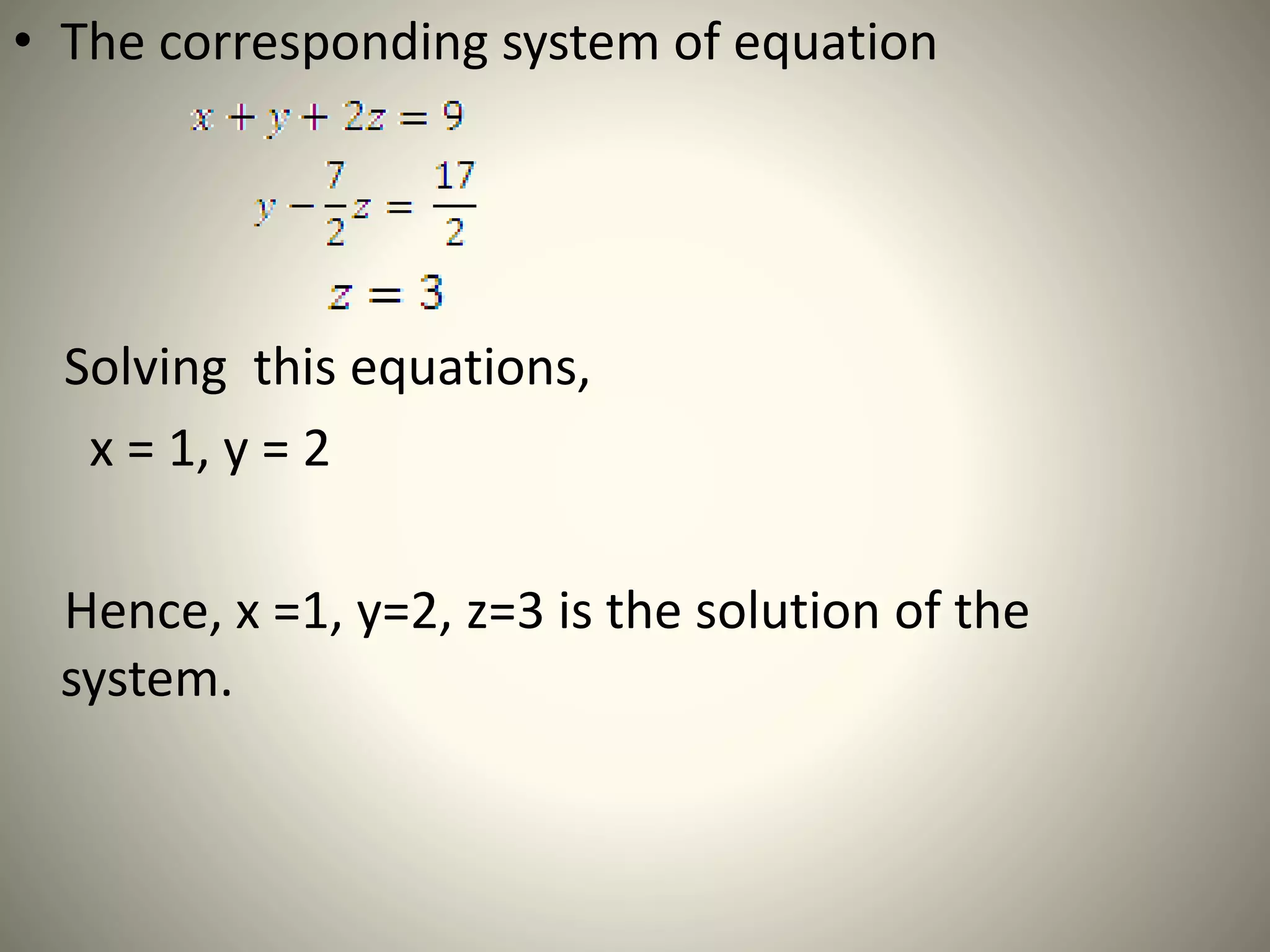
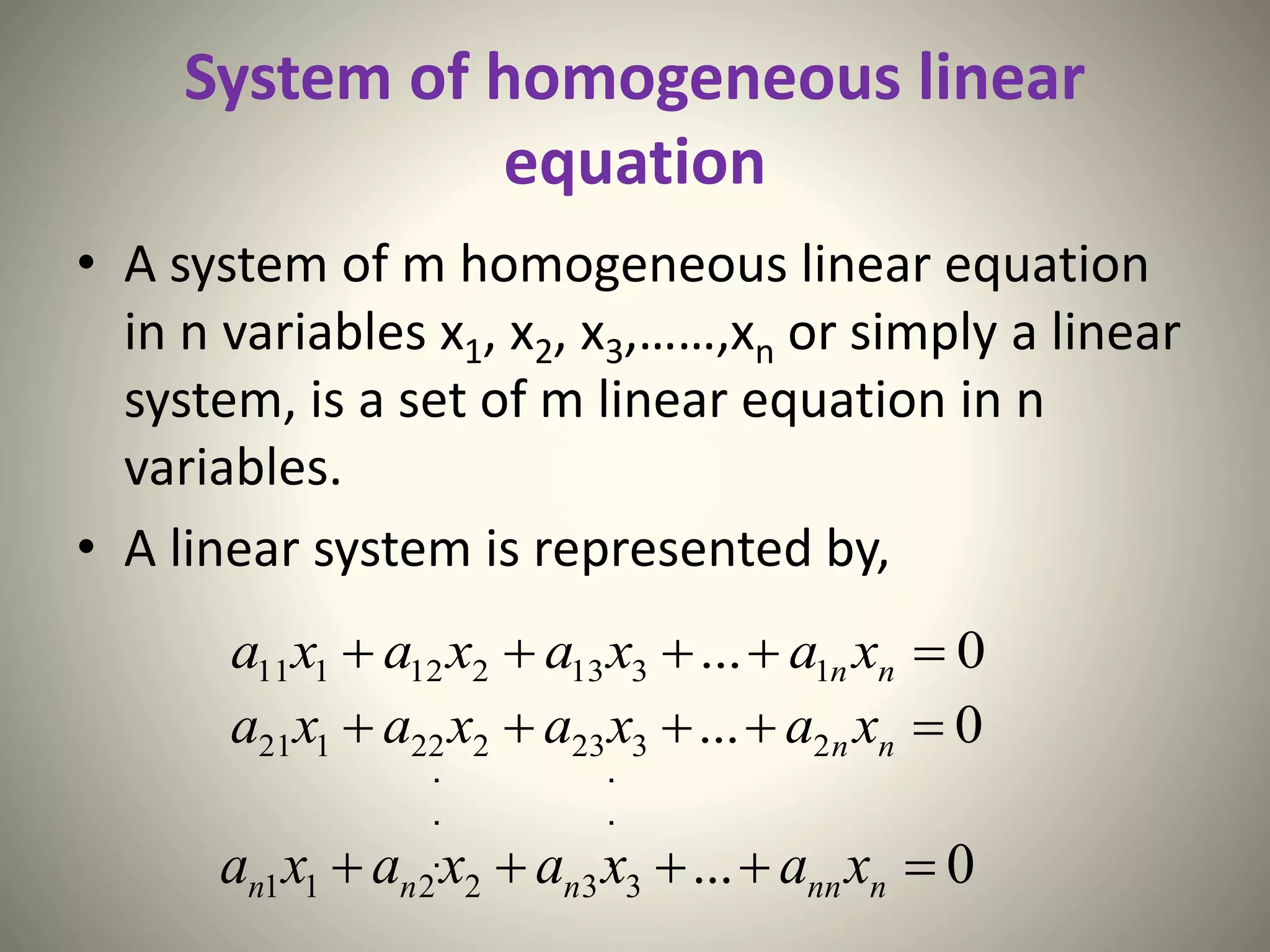
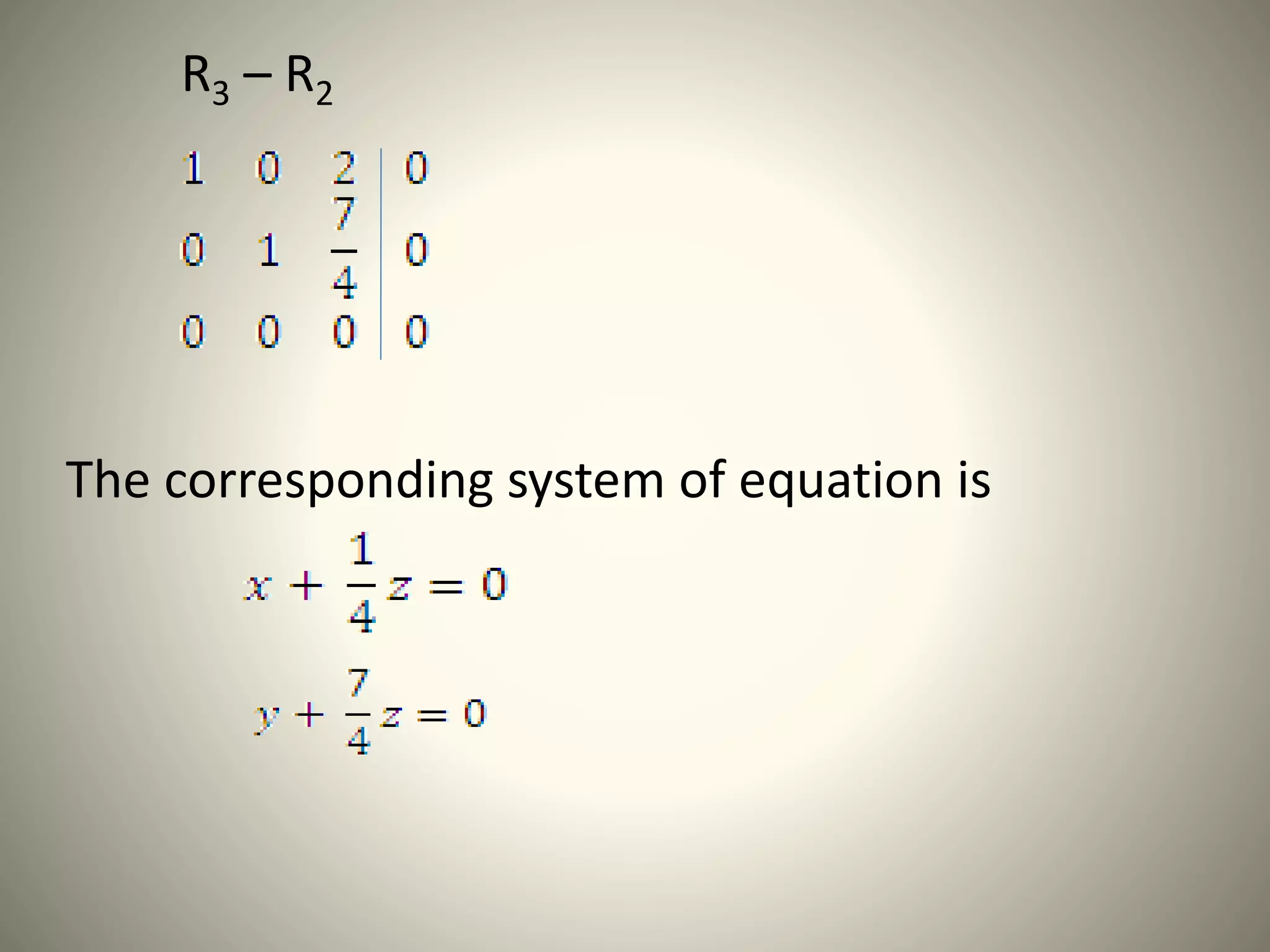

The document discusses the Gaussian elimination method for solving homogeneous and non-homogeneous linear systems of equations. It describes how to form the augmented matrix and use elementary row operations to reduce it to row echelon form. This allows the equations to be solved using back-substitution. For homogeneous systems, the solutions are either the trivial solution where all variables are zero, or there are infinite solutions when the determinant of the coefficient matrix is zero.