Downloaded 96 times
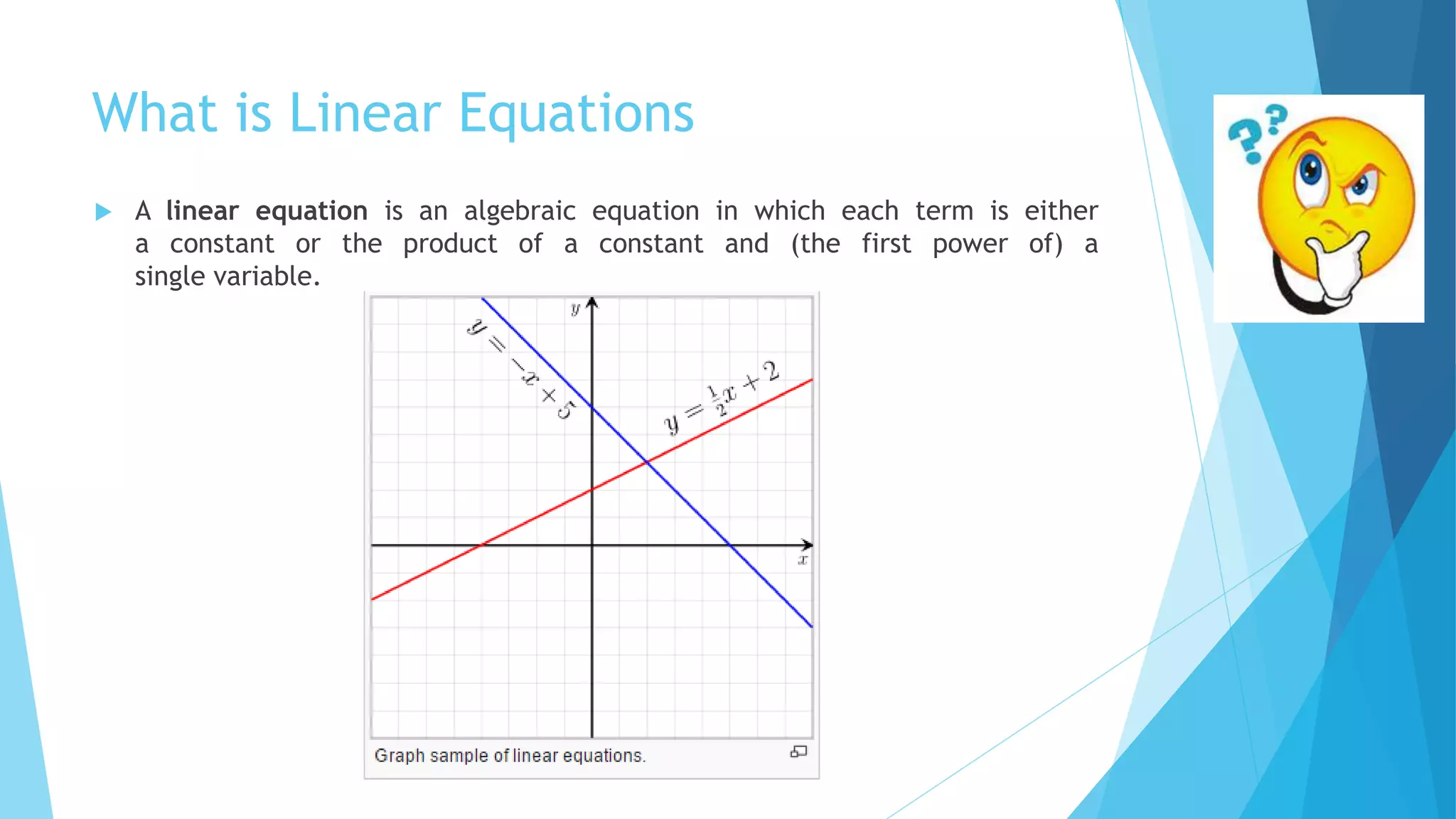
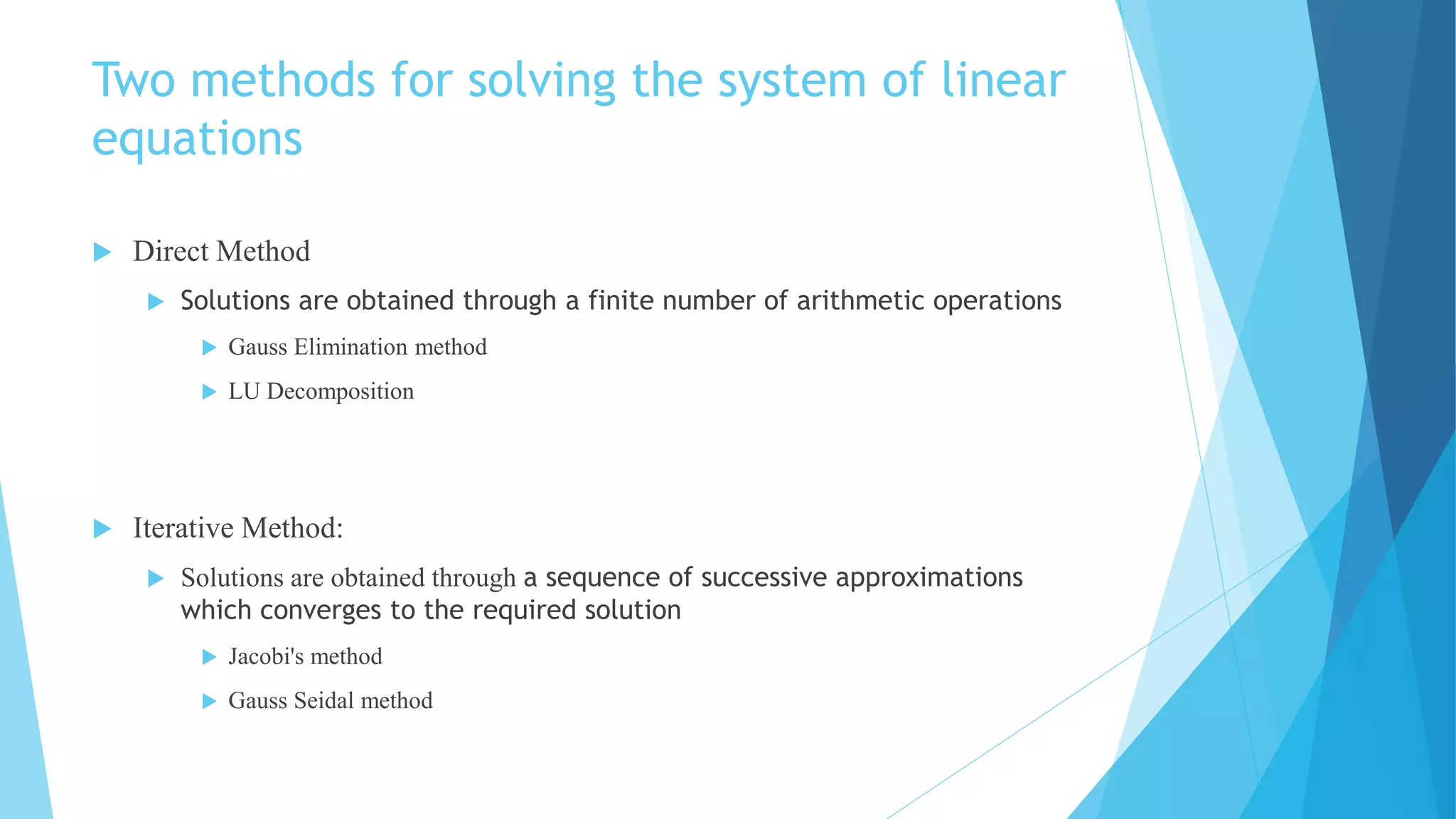
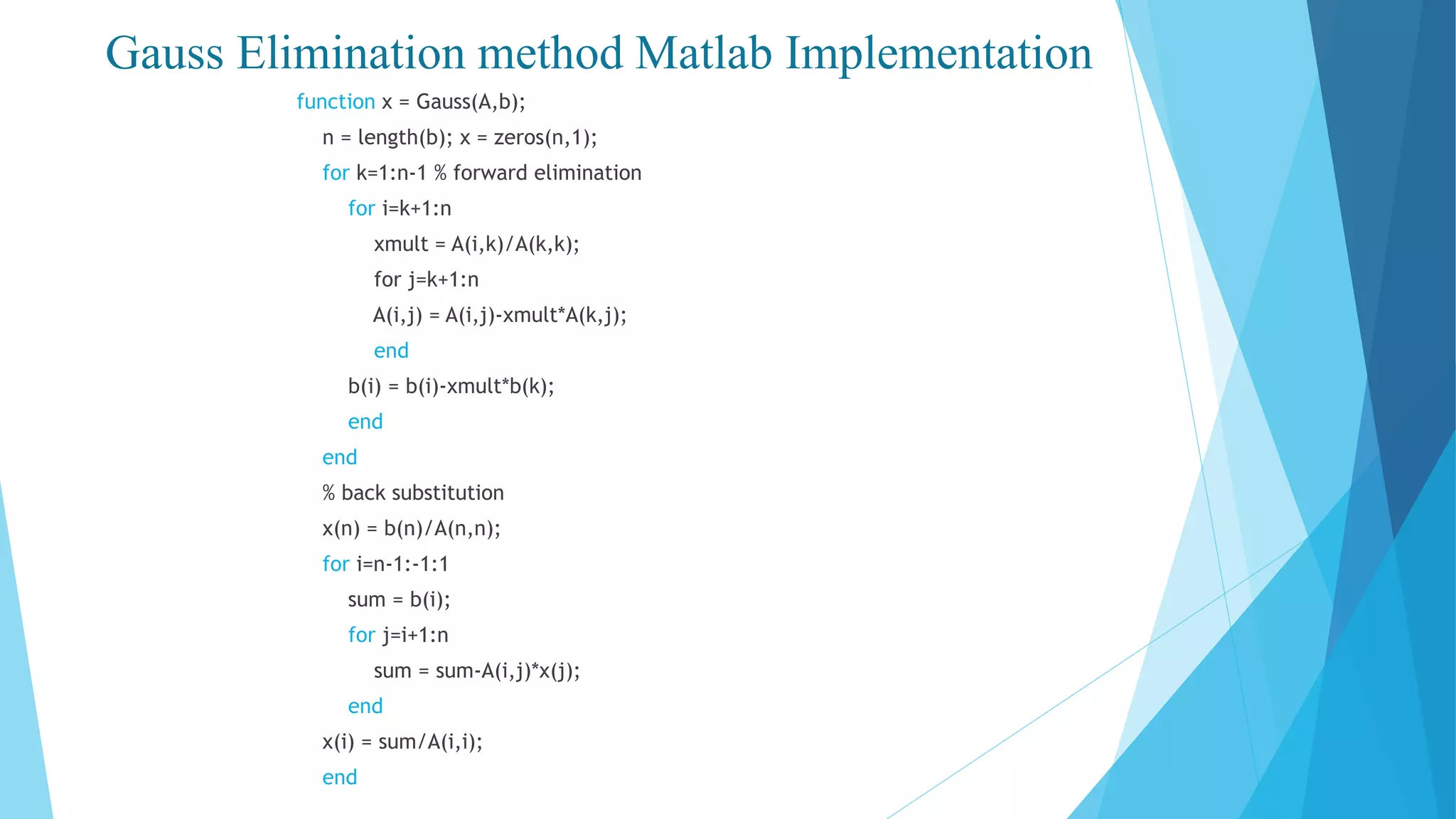
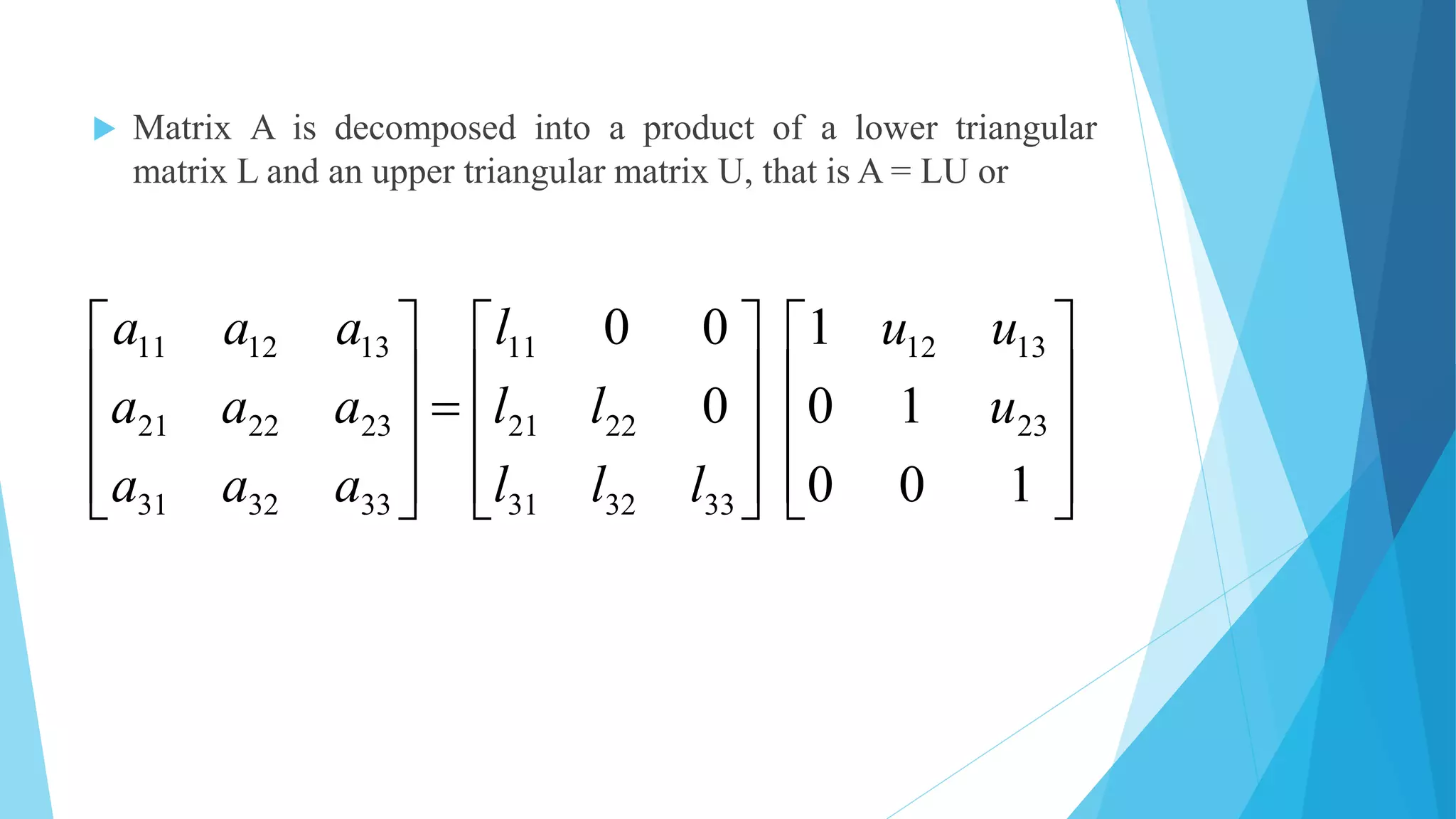
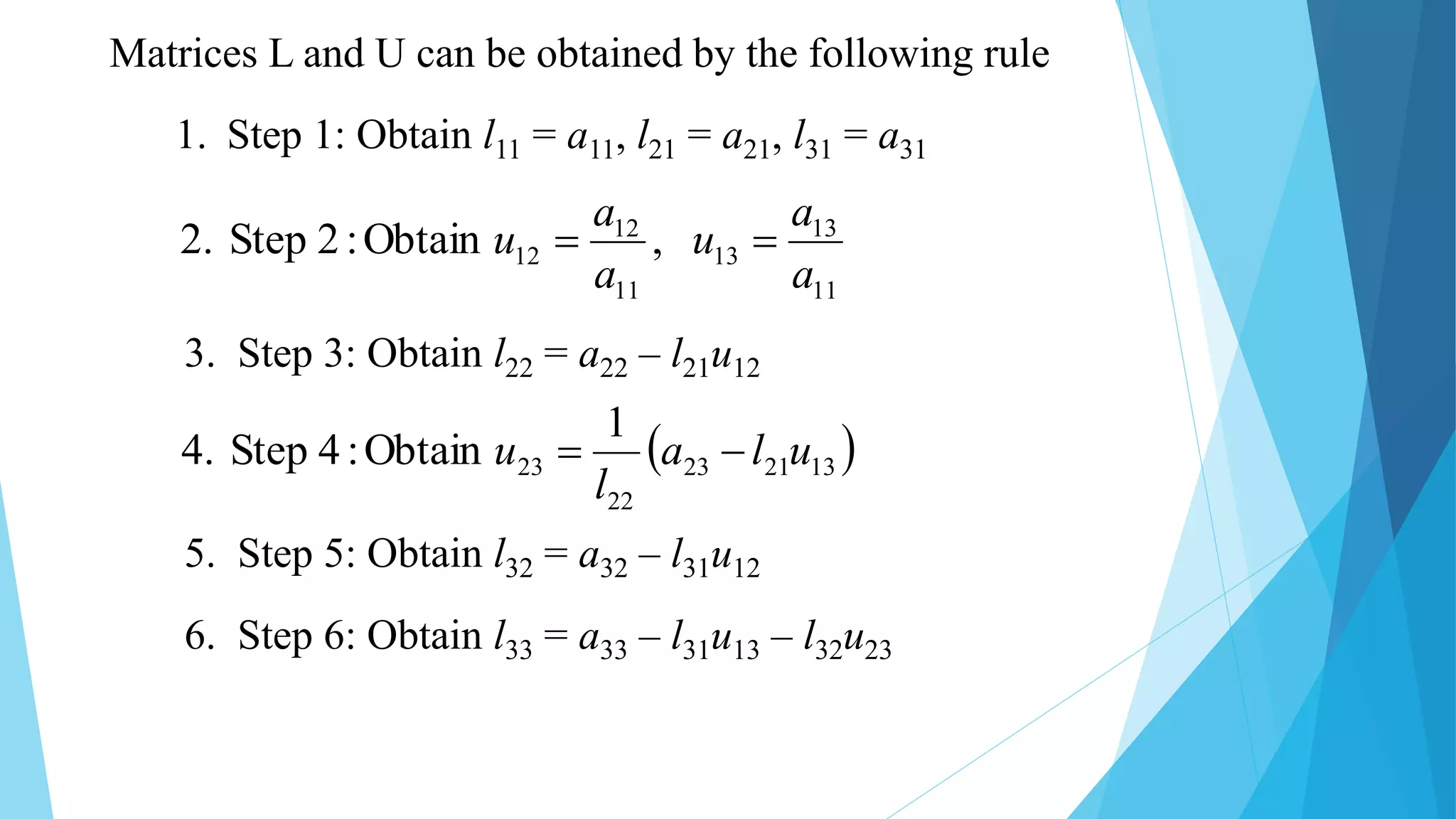
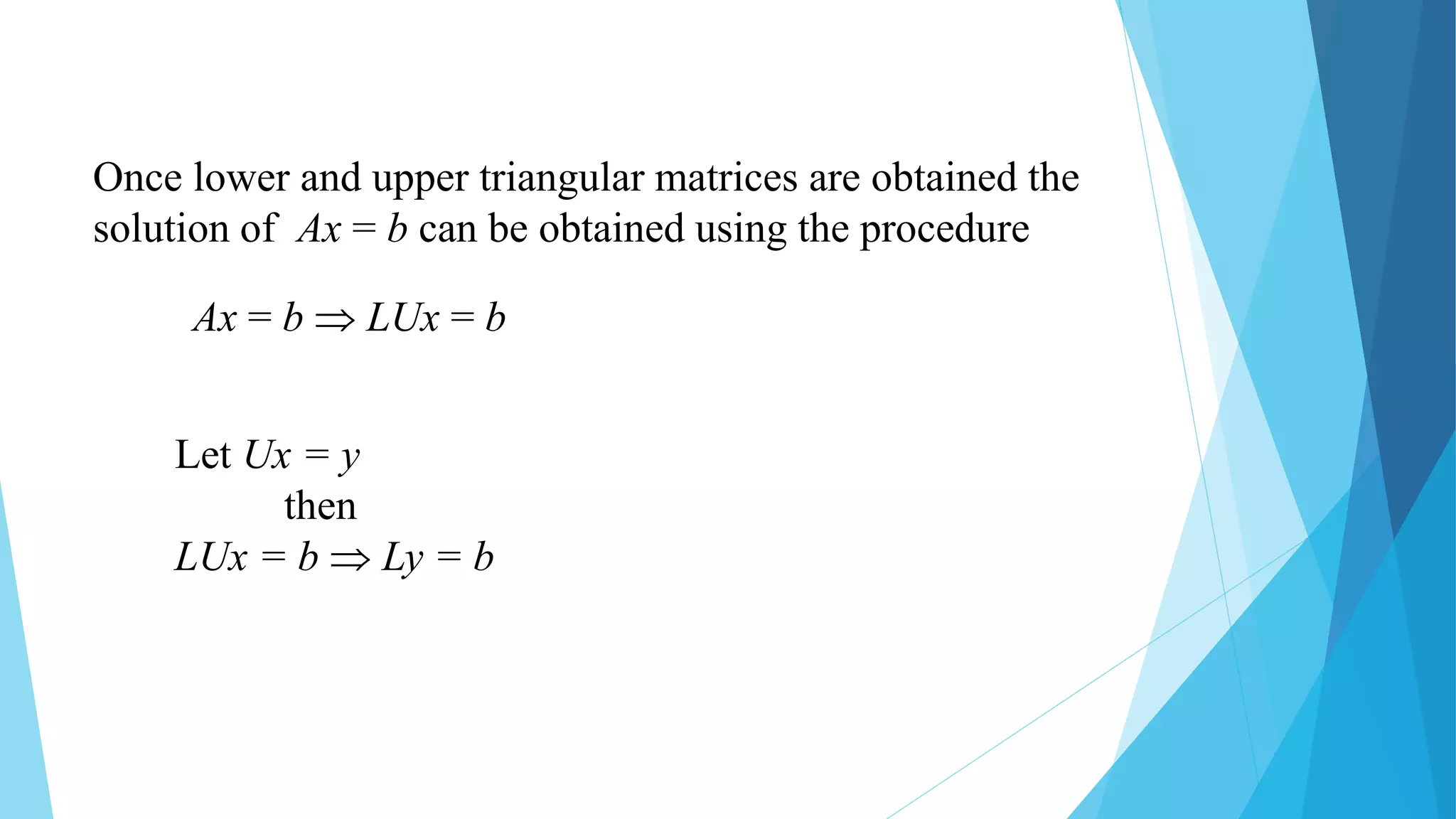
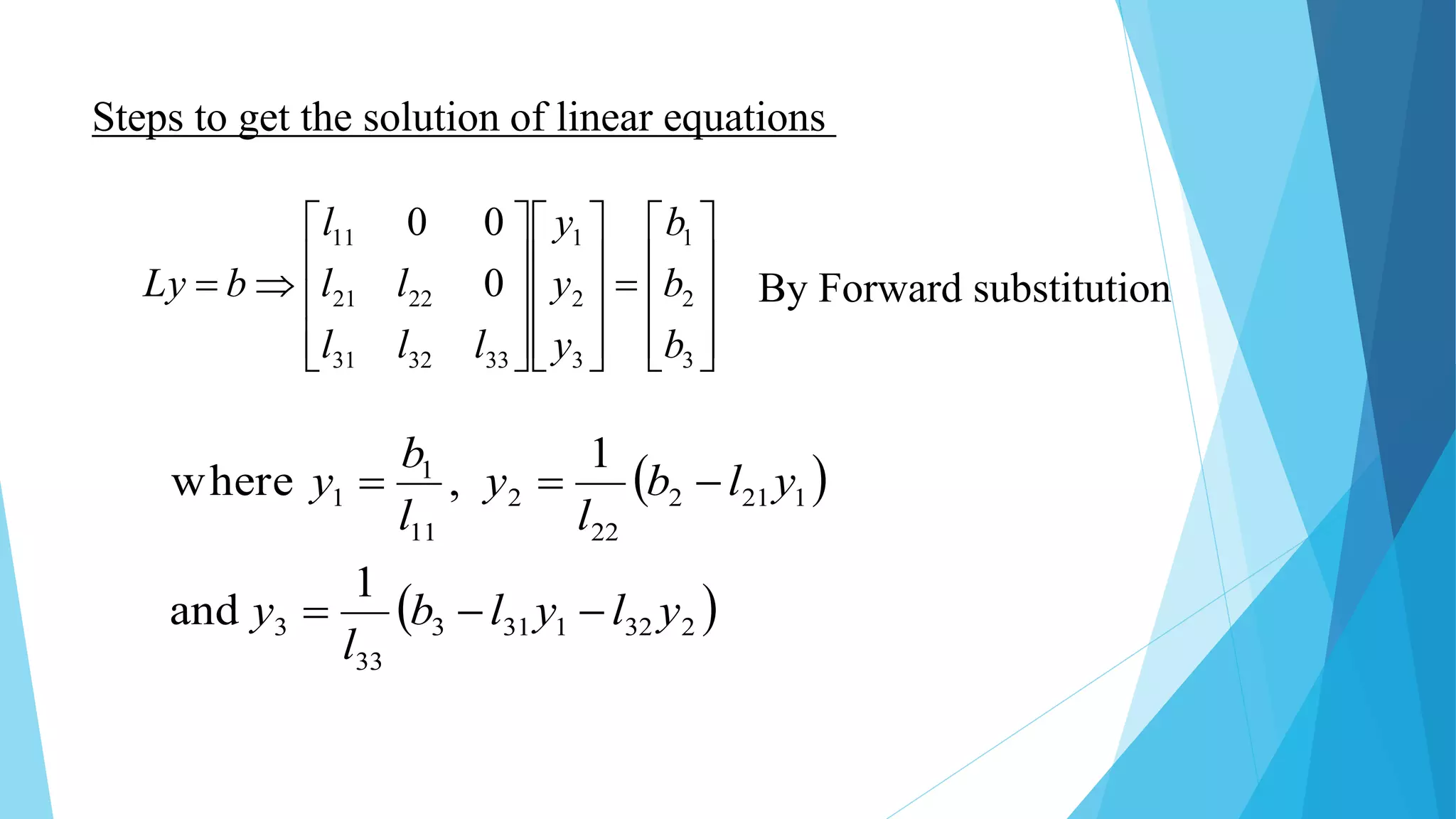
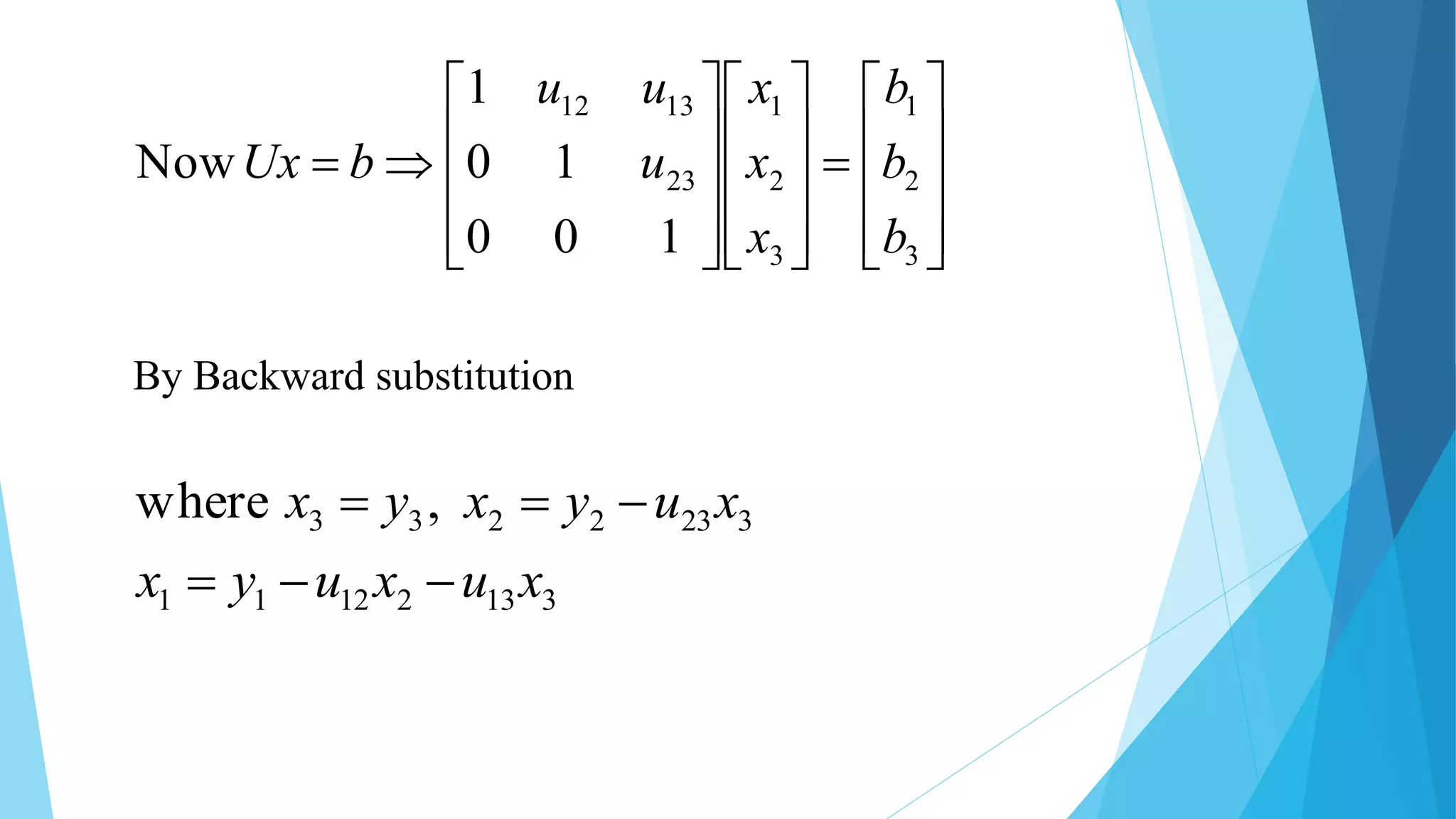
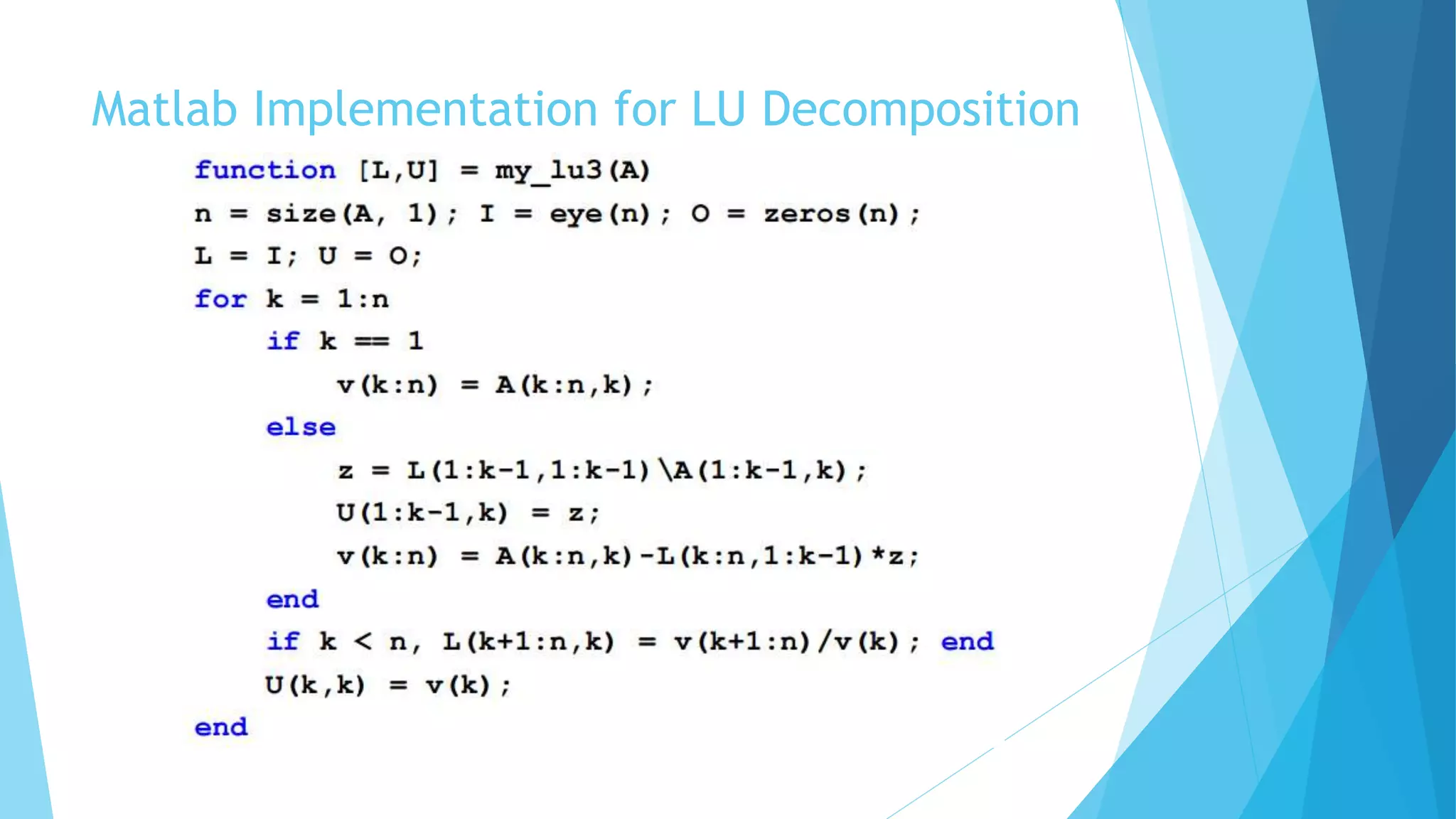
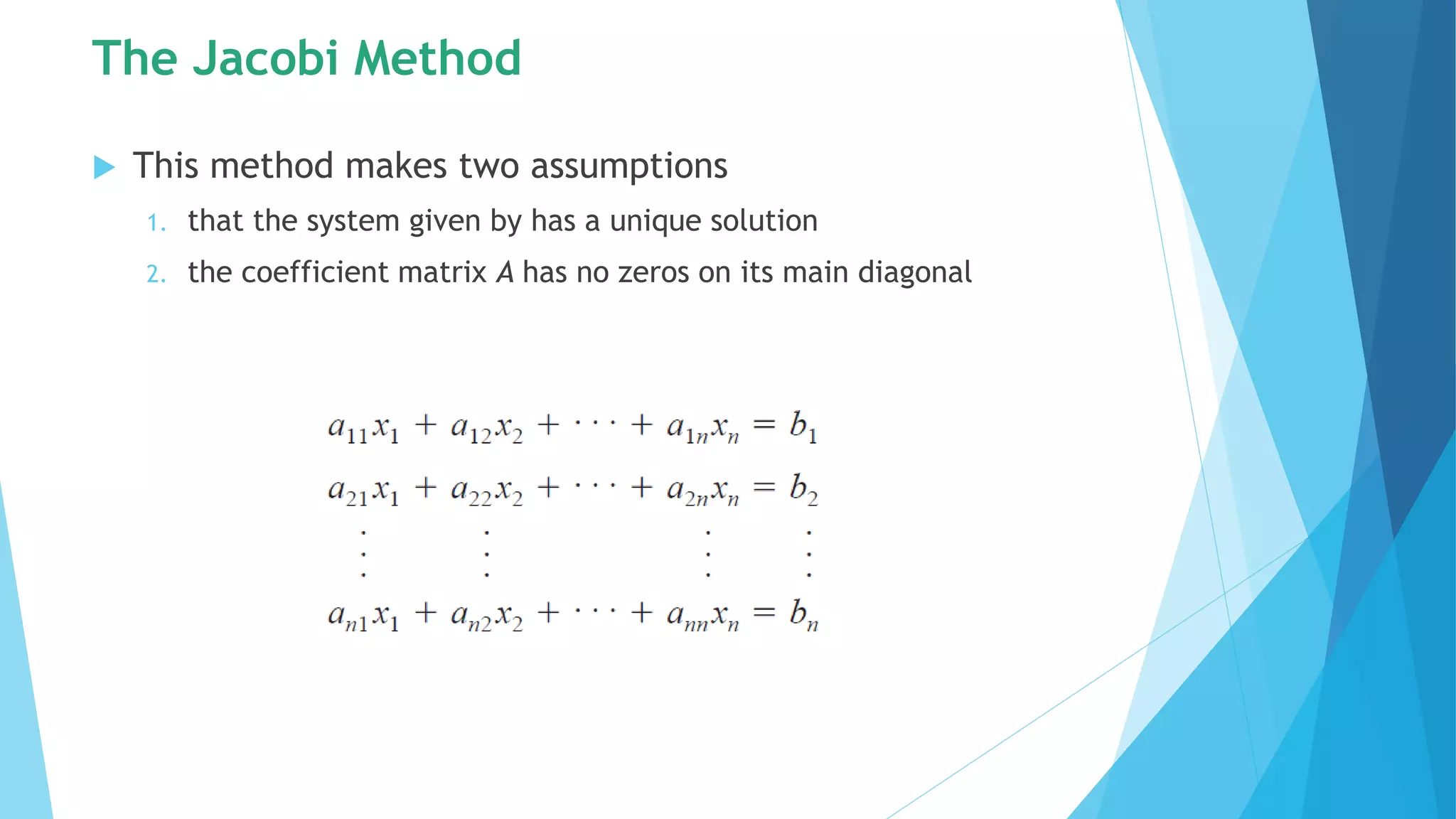
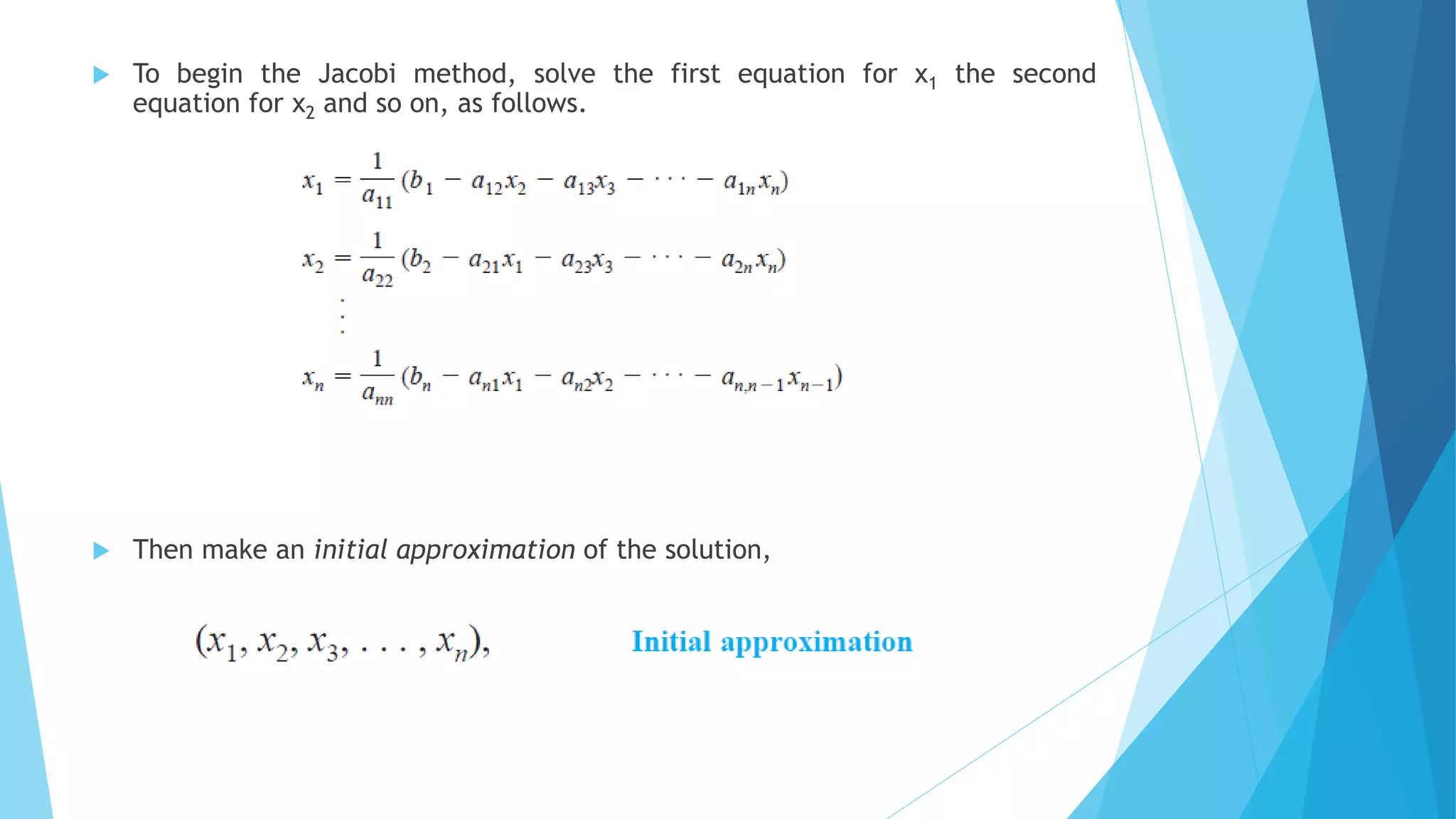
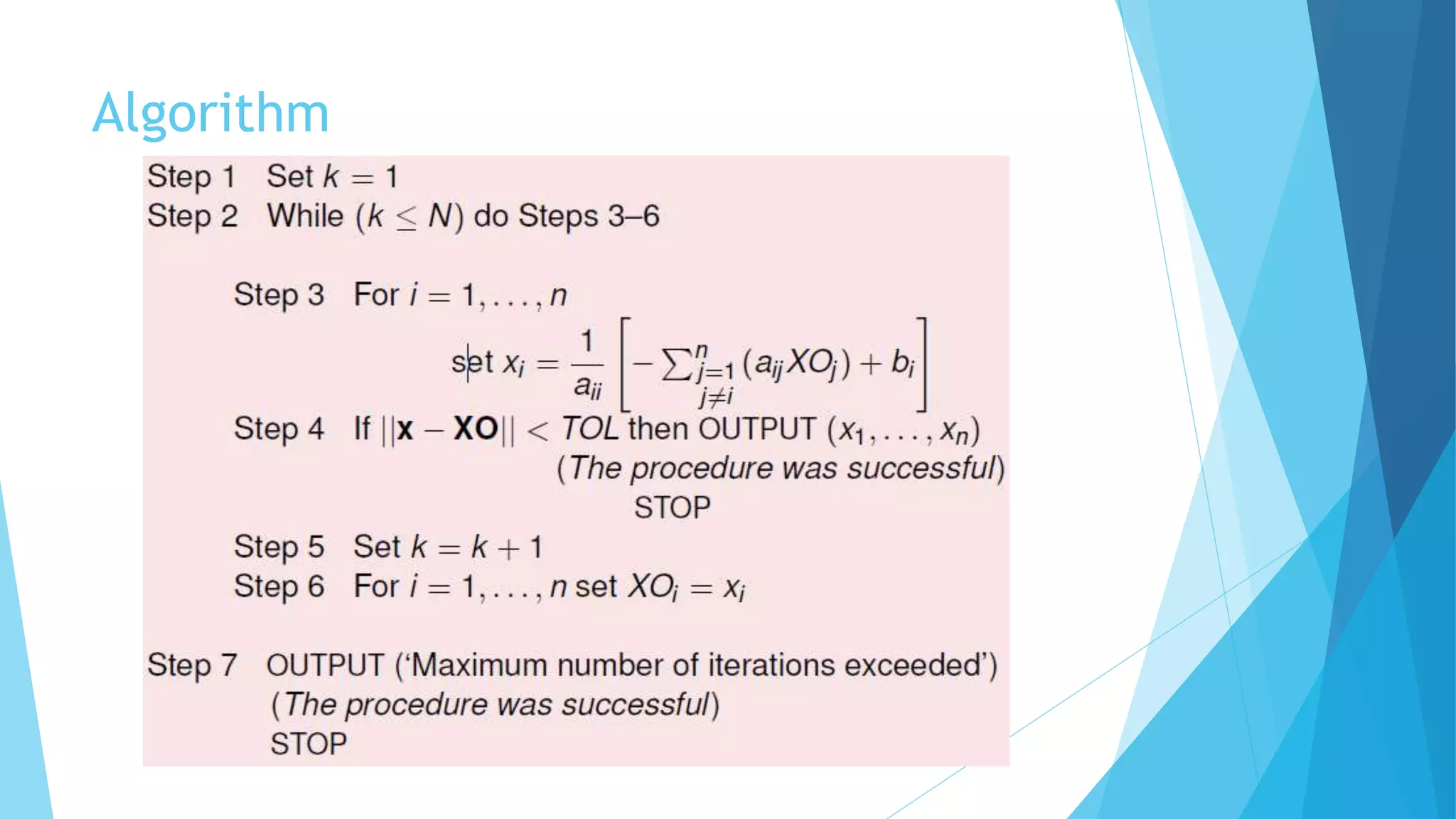
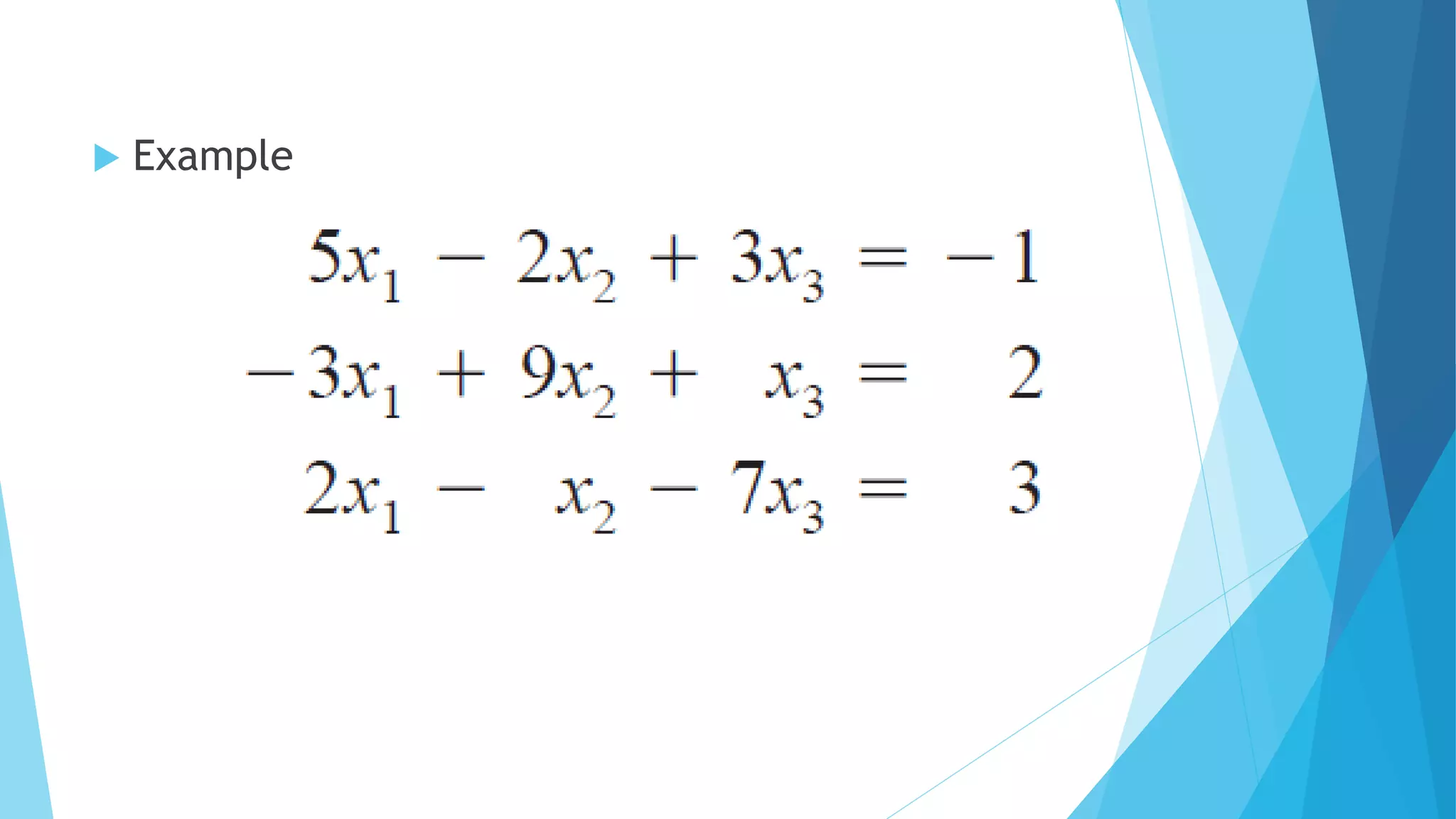
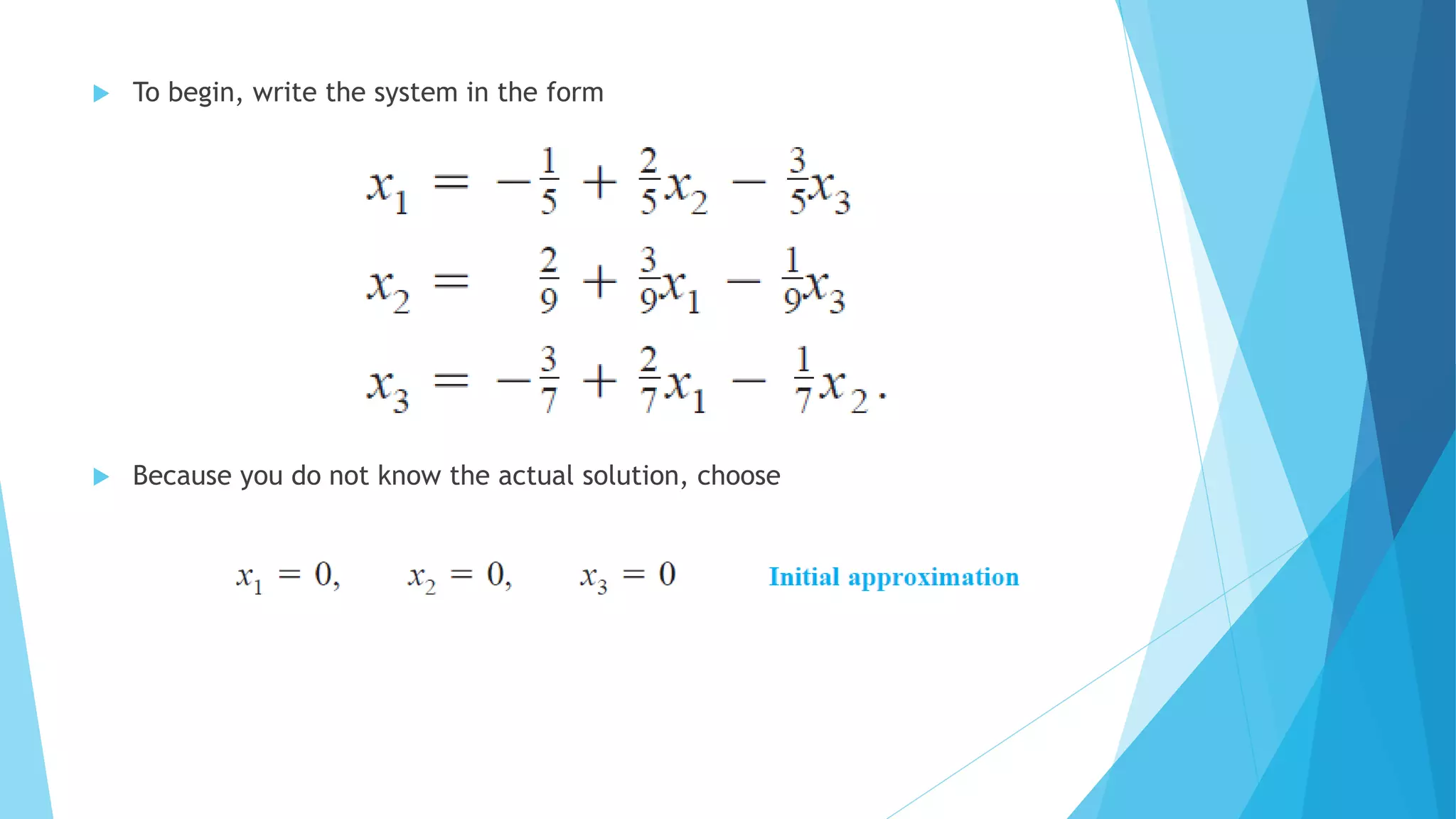
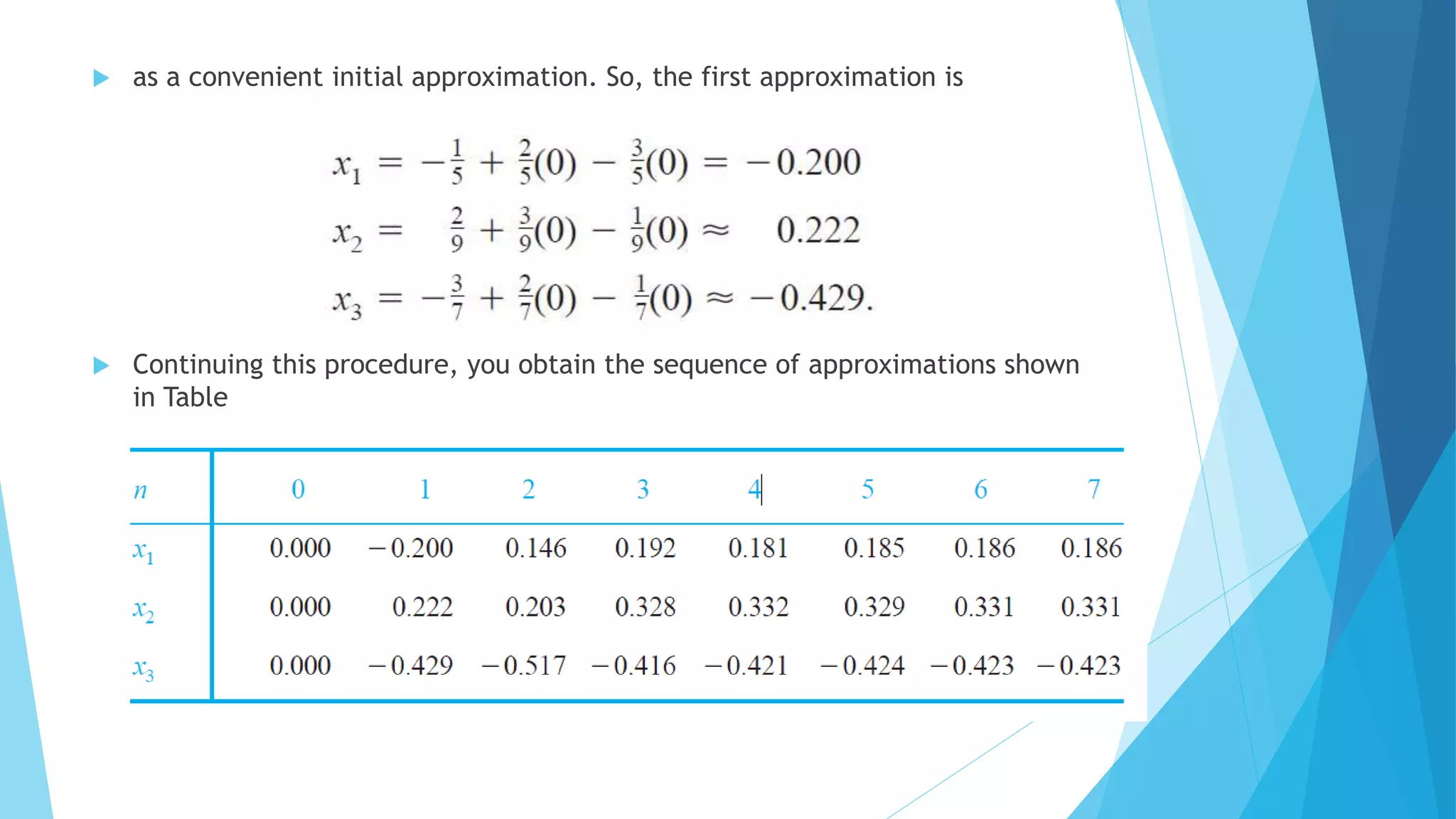
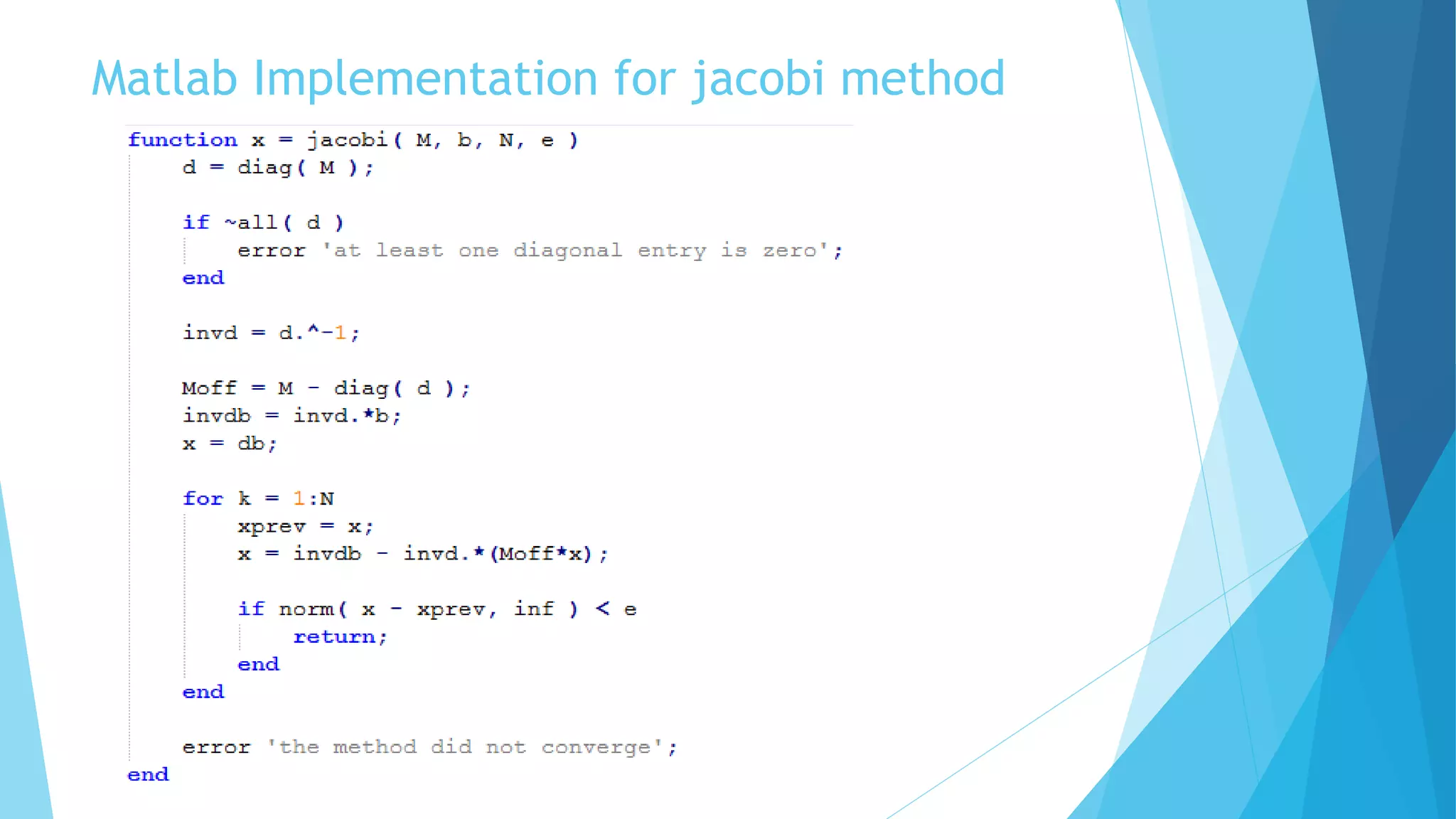
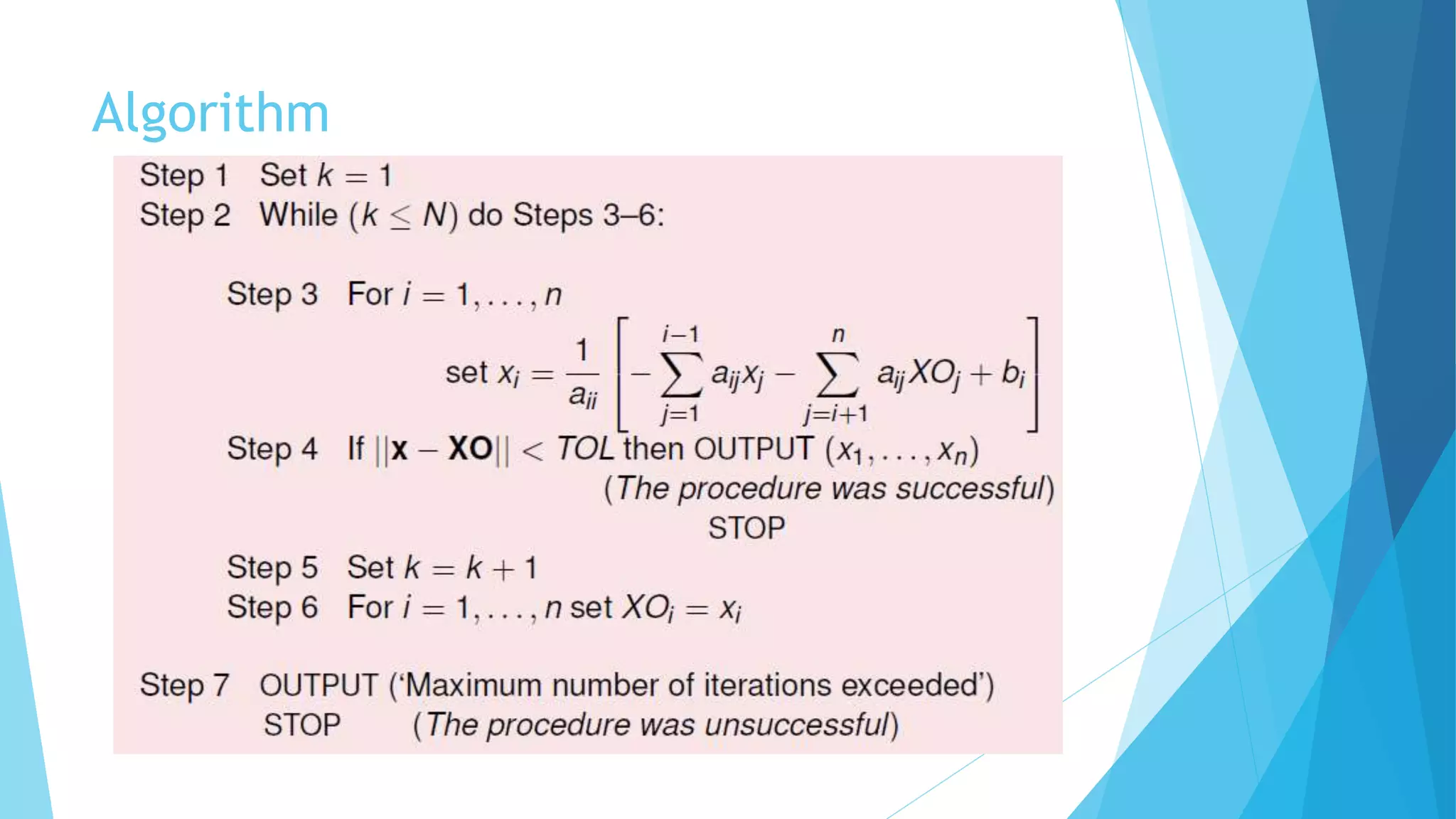
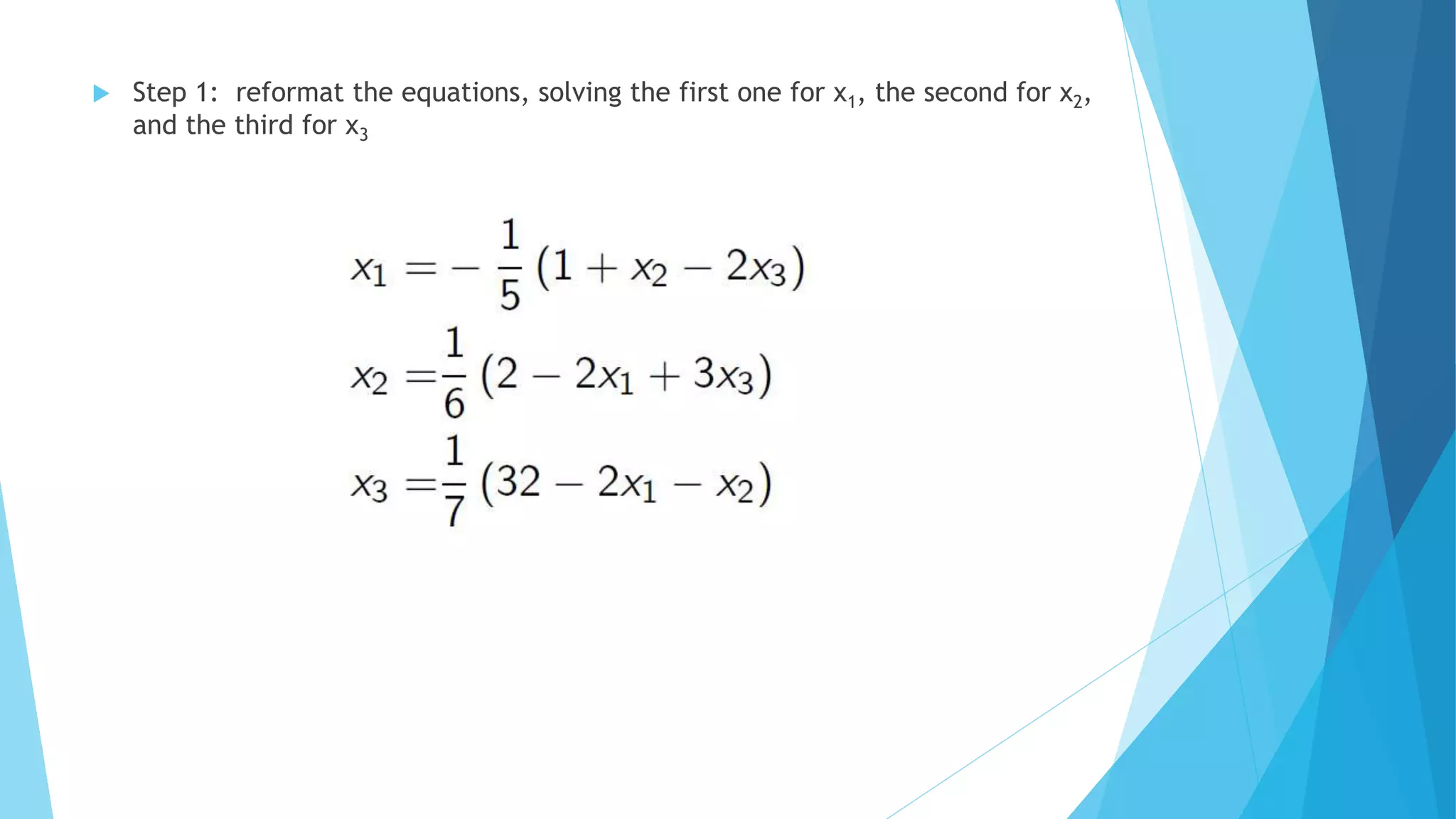
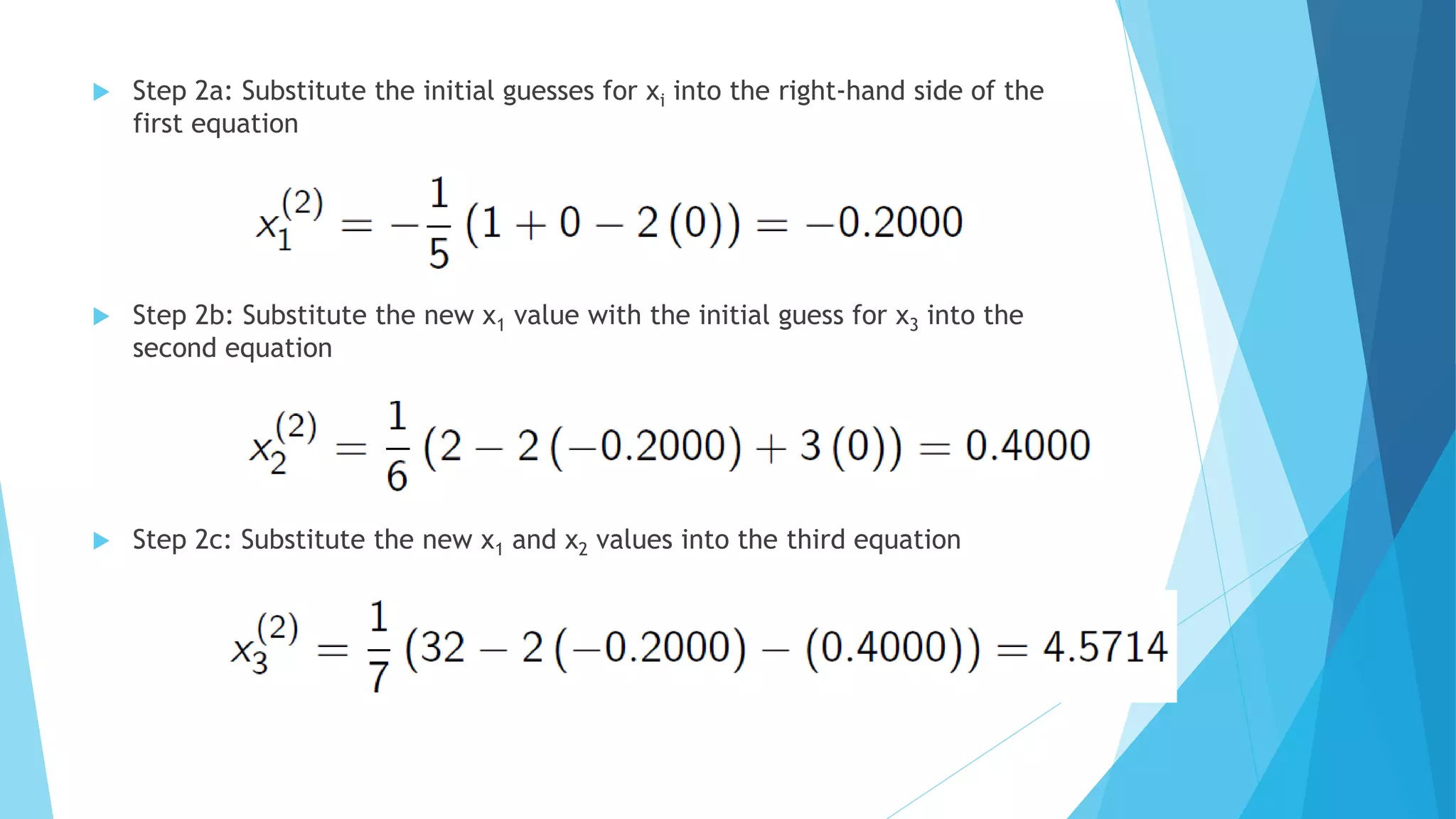
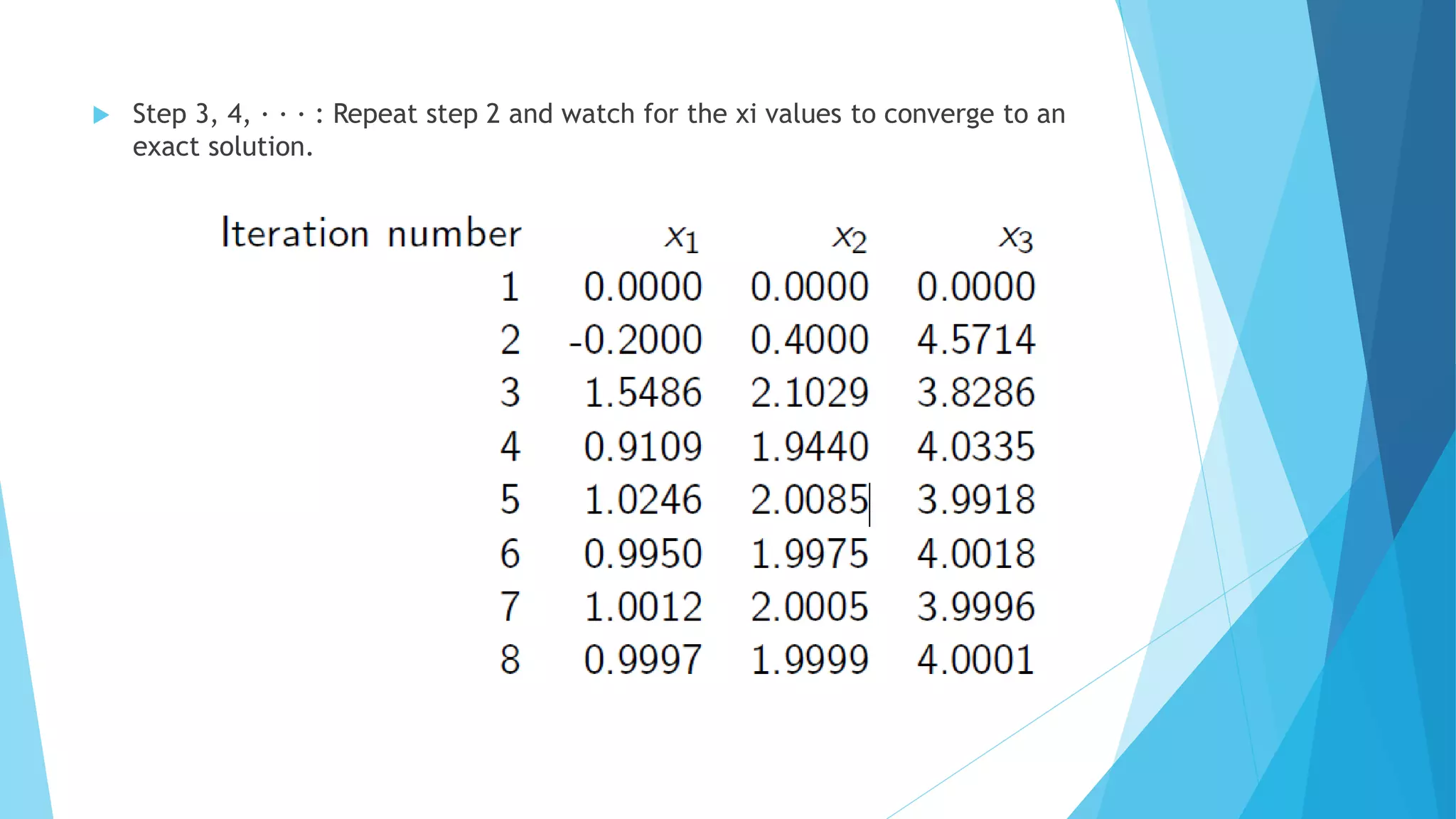
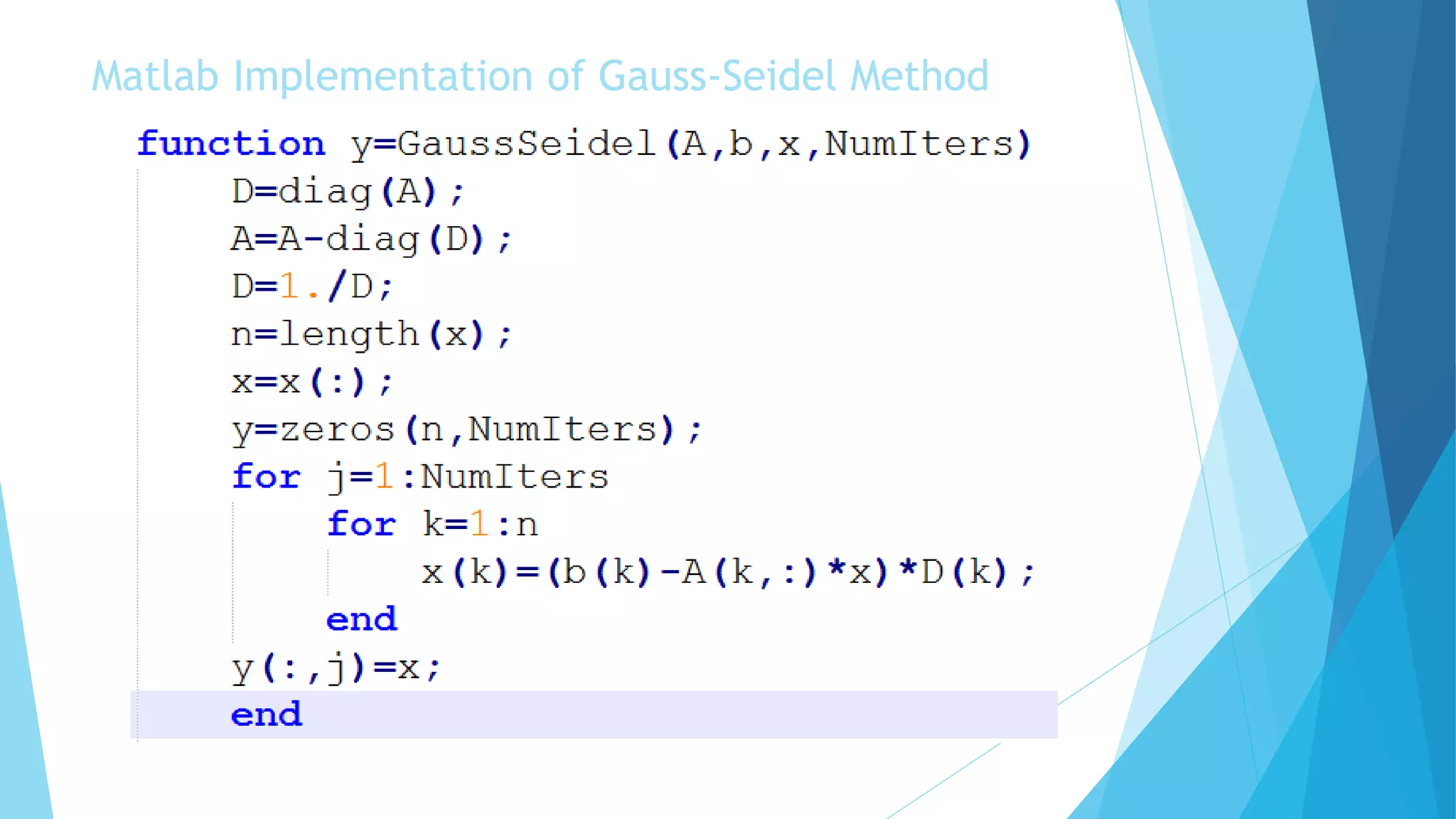

This document discusses methods for solving systems of linear equations. It describes direct methods like Gauss elimination and LU decomposition that obtain solutions in a finite number of steps. It also describes iterative methods like Jacobi's method and Gauss-Seidel method that obtain solutions through successive approximations that converge to the required solution. Pseudocode and MATLAB implementations are provided for various algorithms.