Downloaded 225 times




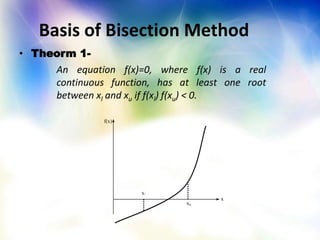
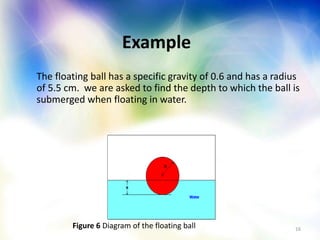
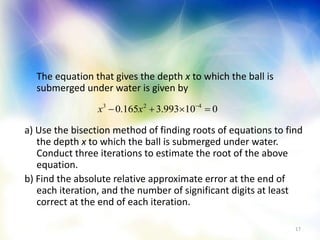
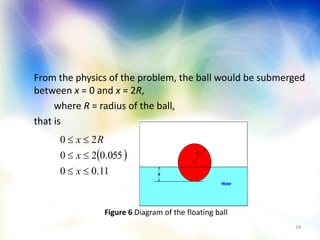
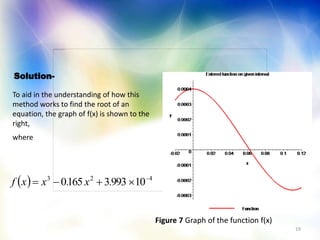
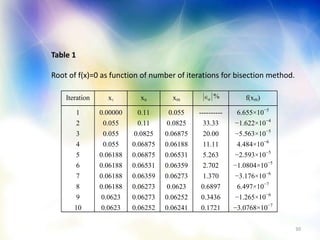
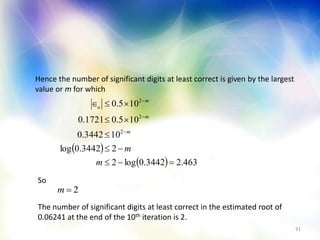
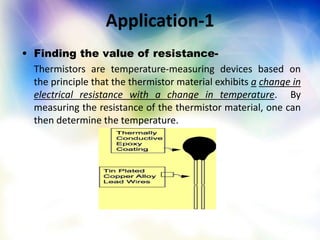
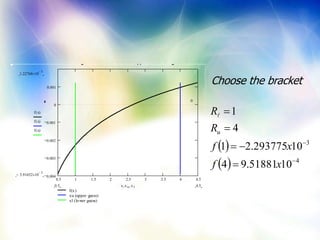
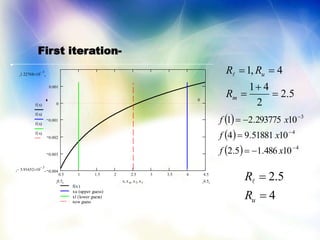
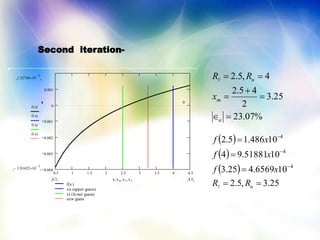
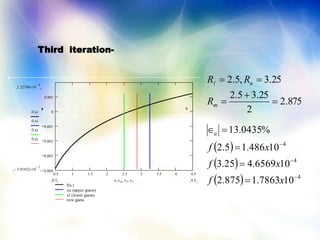
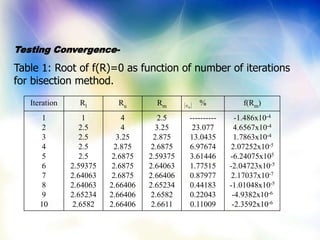



The document provides information about the bisection method for finding roots of non-linear equations. It defines the bisection method, outlines its basis and key steps, and provides an example of using the method to find the depth at which a floating ball is submerged in water. Over 10 iterations, the bisection method converges on an estimated root of 0.06241 for the example equation, with 2 significant digits found to be correct after the final iteration. The document also discusses an application of using the bisection method to find resistance of a thermistor at a given temperature.



























































![CH-2_5 ROOTS_OF_NON_LINEAR_EQ [Compatibility Mode].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/ch-25rootsofnonlineareqcompatibilitymode-260123171244-4215d39d-thumbnail.jpg?width=640&height=640&fit=bounds)

























