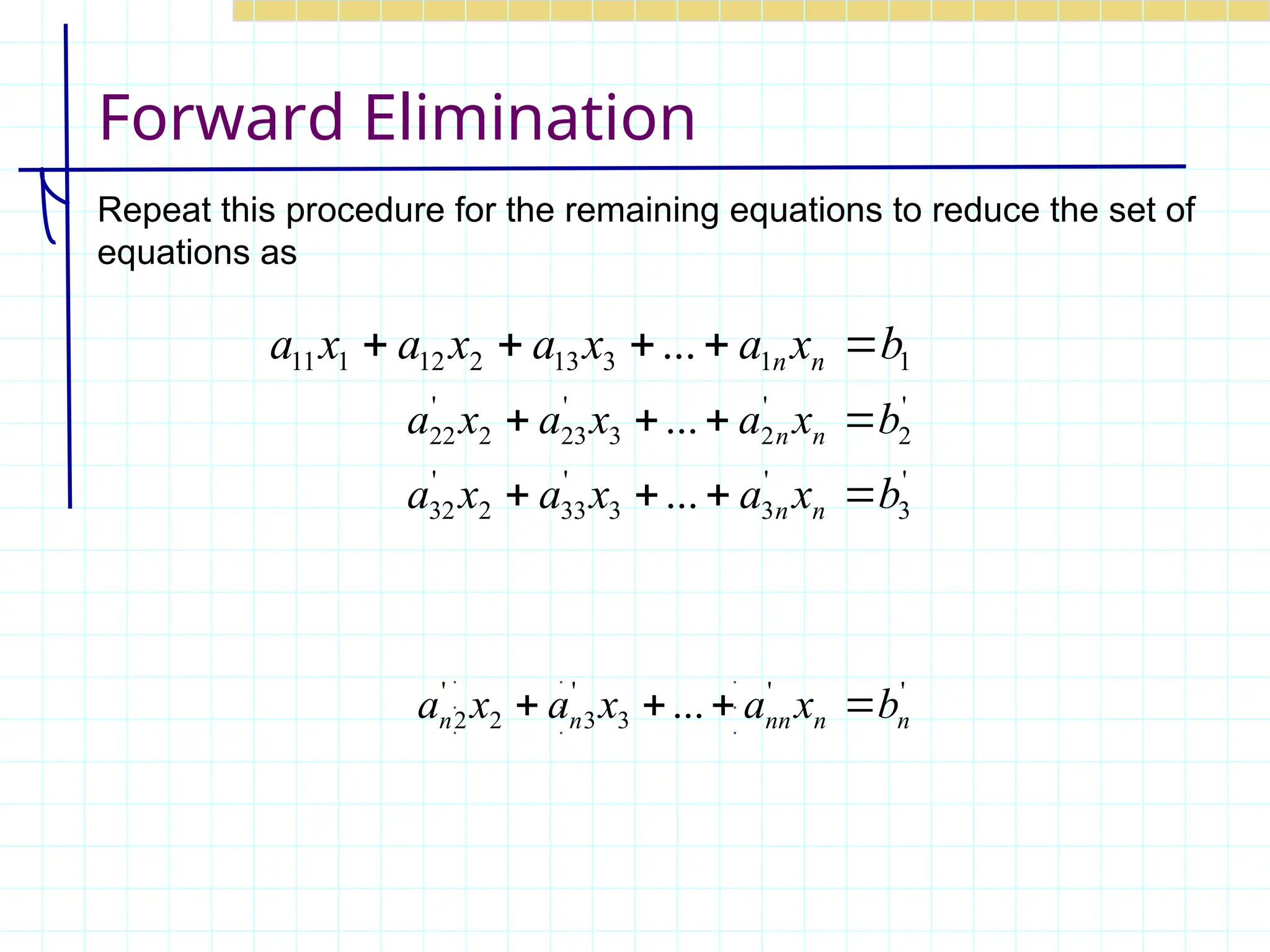
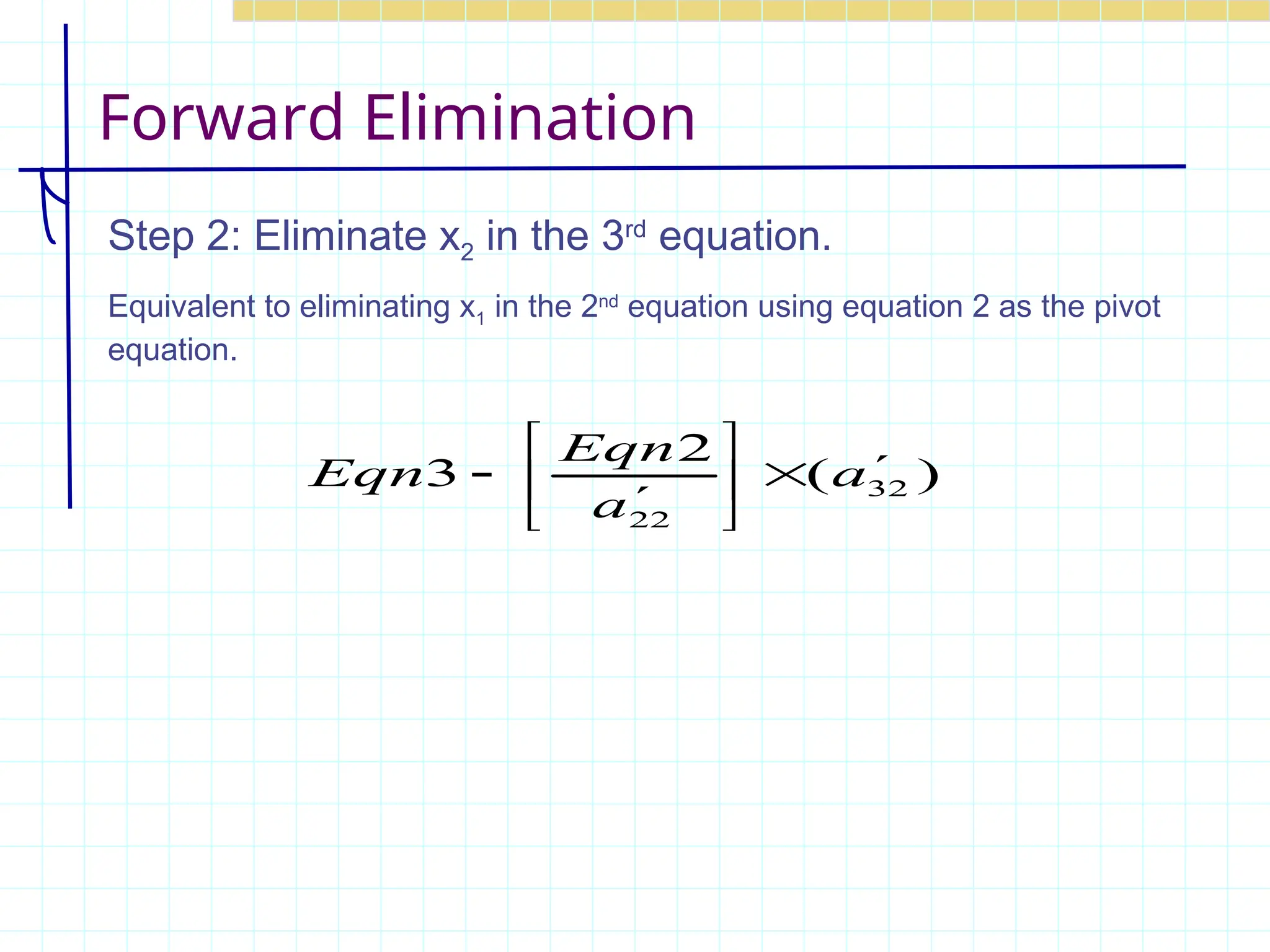
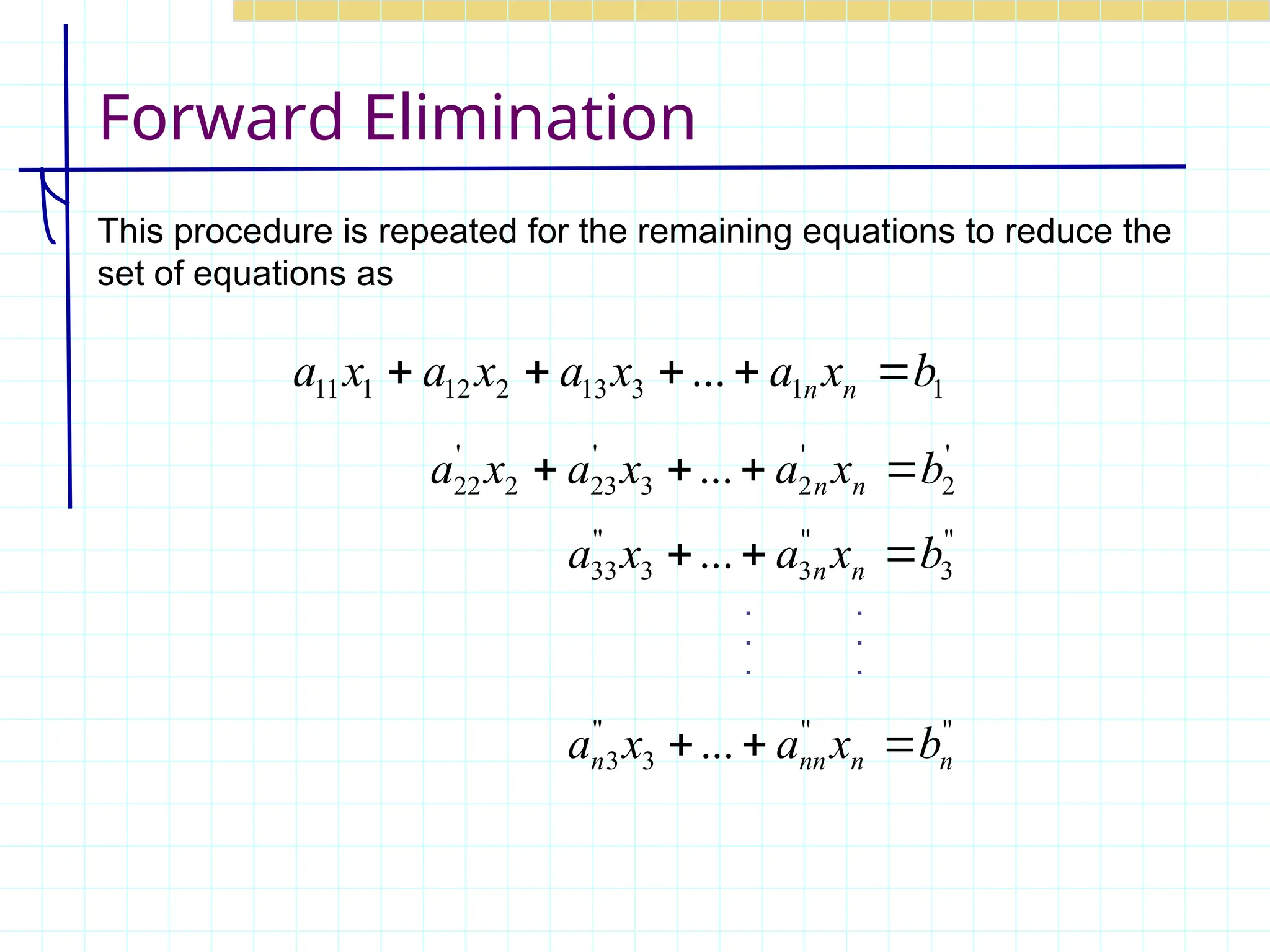
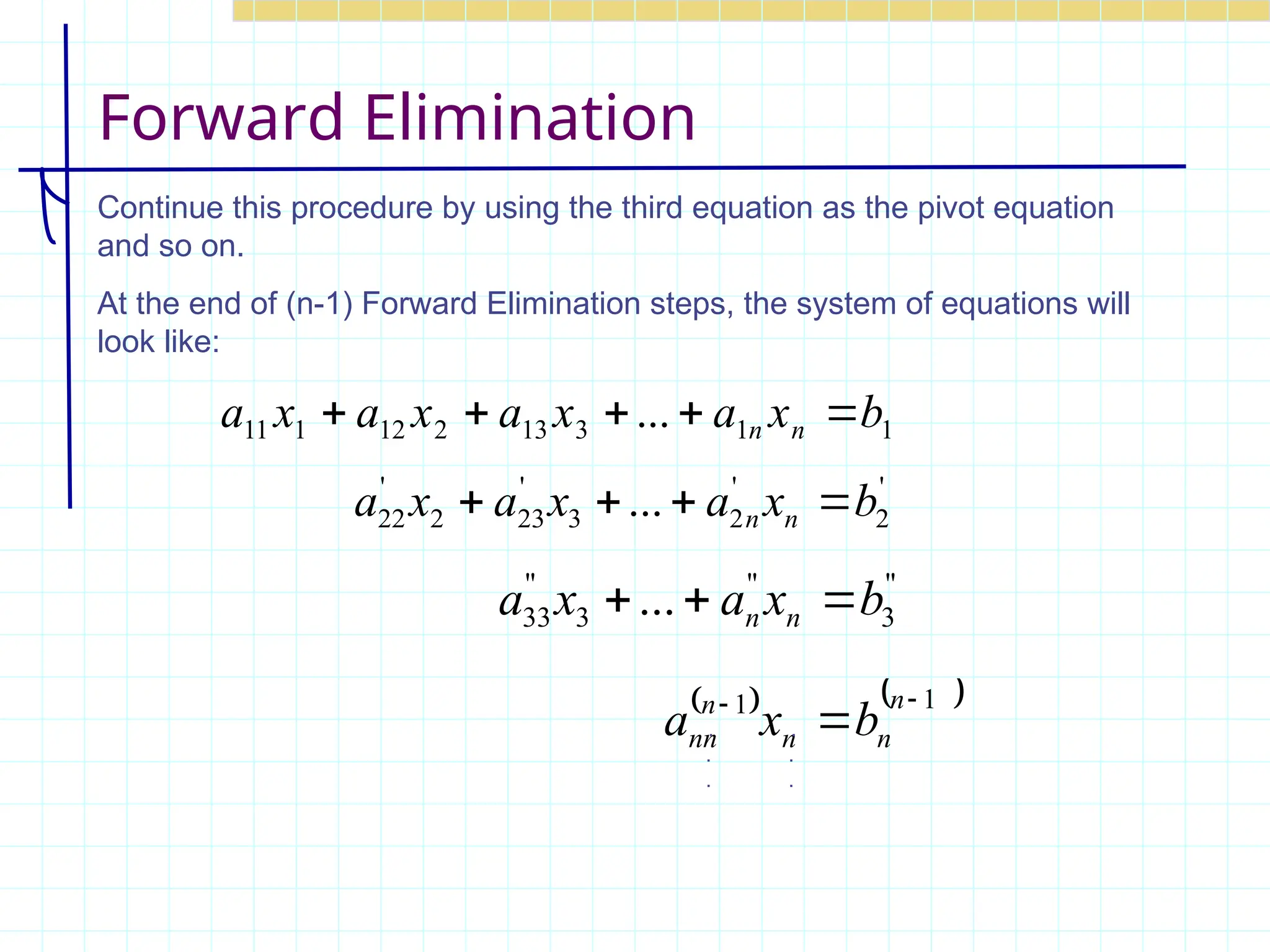
The document provides an overview of Gaussian elimination, a numerical method for solving simultaneous linear equations represented in matrix form. It explains concepts such as matrix rank, consistency of equations, and details the elimination and back substitution processes involved in solving the equations. Examples illustrate the steps taken to achieve solutions through this method.
![Basic Principles
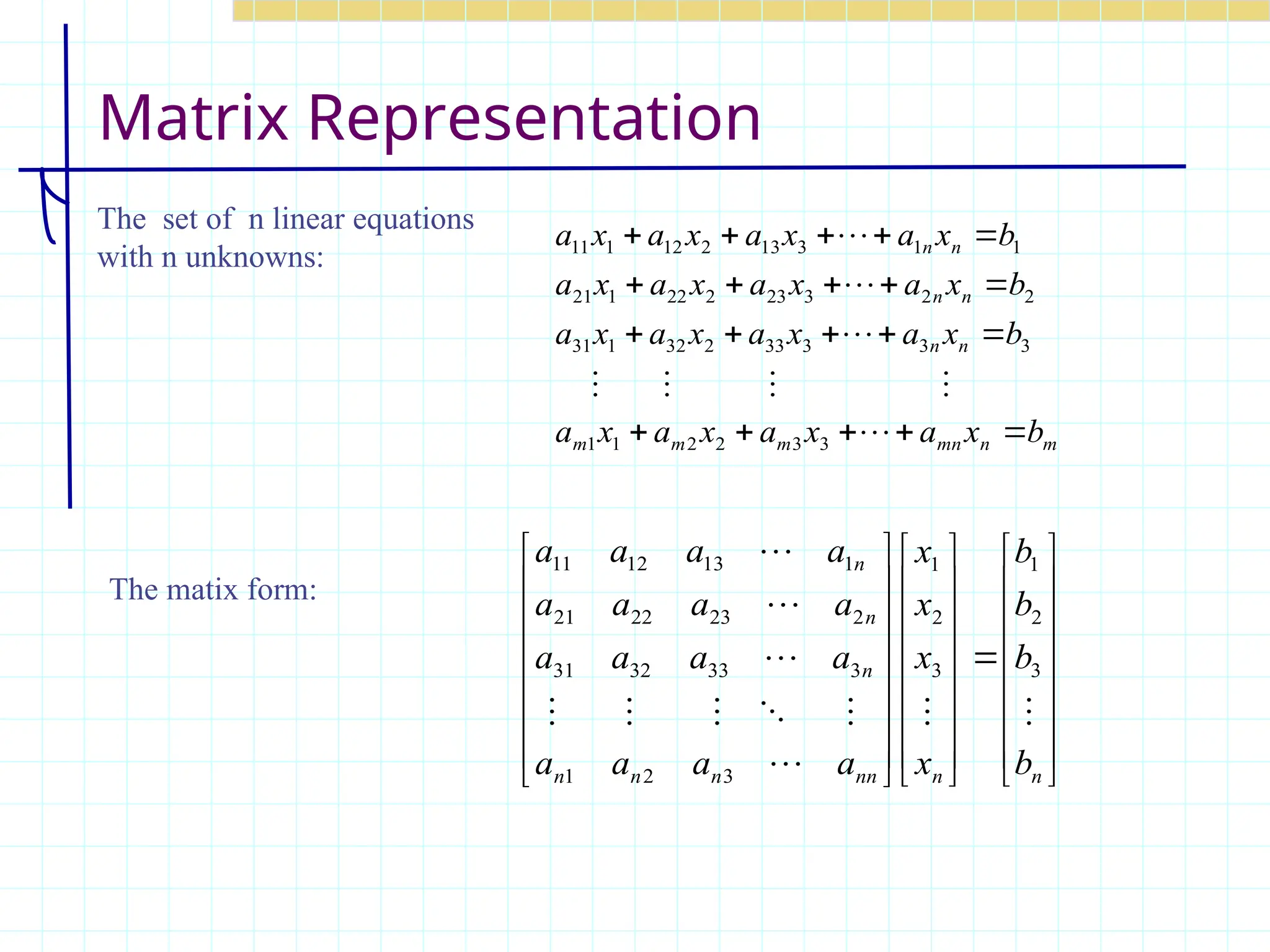
• The general description of a set of linear equations in the matrix
form: [A][X] = [B]
• Where, [A] is ( m x n ) matrix, the [X] is a ( n x 1 ) vector, and
the [B] is a (m x 1 ) vector.
• Where m in no. of rows and n is no. of columns.
• How we solve such a system:
• Write the equations in natural form
• Identify unknowns and order them
• Isolate unknowns
• Write equations in matrix form](https://image.slidesharecdn.com/lec10gausselimination1-240819130116-d06ba98c/75/lec-10-gauss-elimination-mathematics-note-for-engineering-subject-3-2048.jpg)
![Types of Matrix Formulation
If m = n The solution of [A]{x} ={b} with n unknowns and m(n) equations
If m > n The system is overdetermined system (Least Square Problems)
If m < n The system is underdetermined system (Optimization Problems)
m
n
mn
m
m
m
n
n
n
n
n
n
b
x
a
x
a
x
a
x
a
b
x
a
x
a
x
a
x
a
b
x
a
x
a
x
a
x
a
b
x
a
x
a
x
a
x
a
3
3
2
2
1
1
3
3
3
33
2
32
1
31
2
2
3
23
2
22
1
21
1
1
3
13
2
12
1
11
Suppose we have an ( m x n ) Array](https://image.slidesharecdn.com/lec10gausselimination1-240819130116-d06ba98c/75/lec-10-gauss-elimination-mathematics-note-for-engineering-subject-4-2048.jpg)
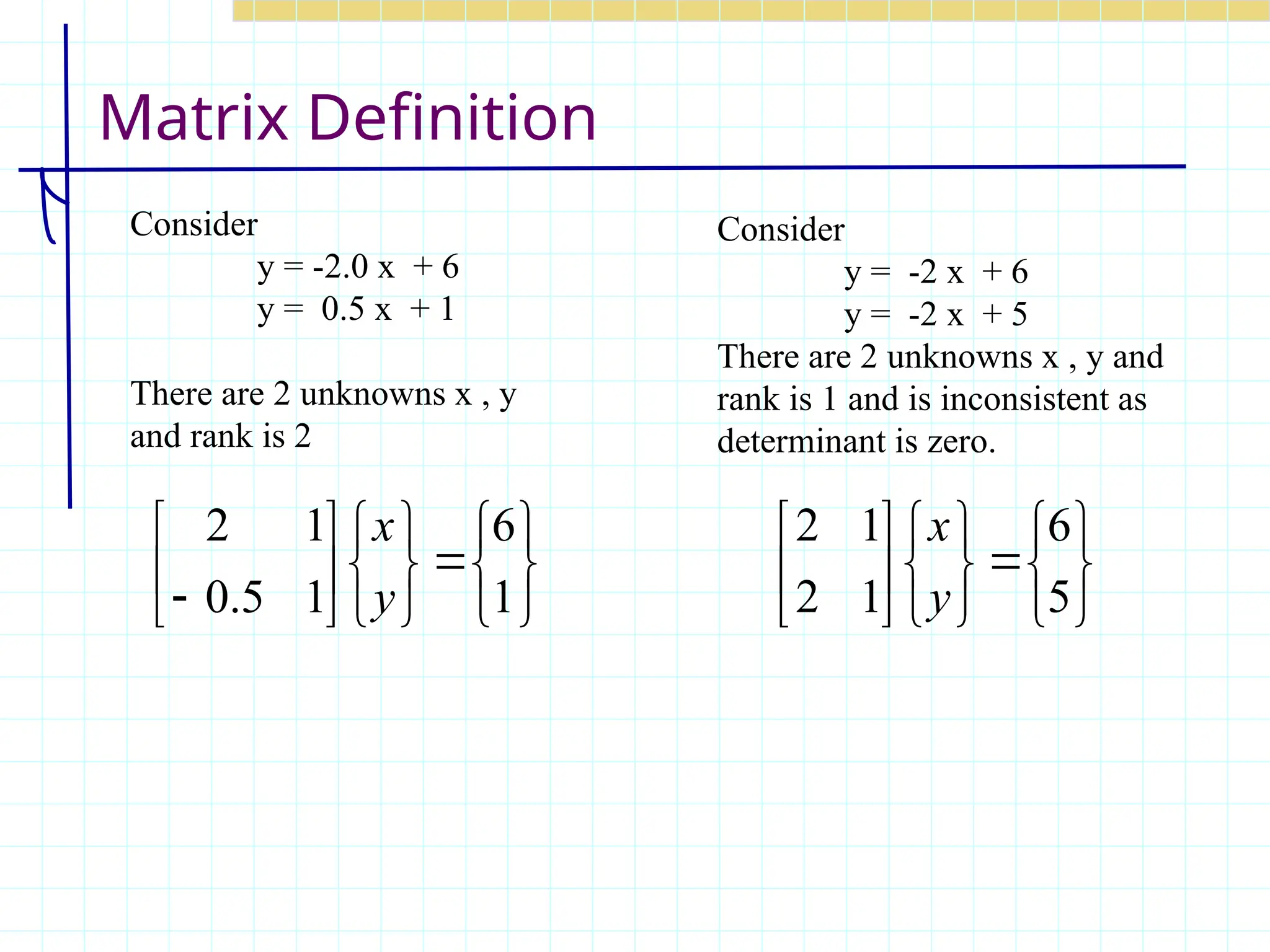
![Matrix
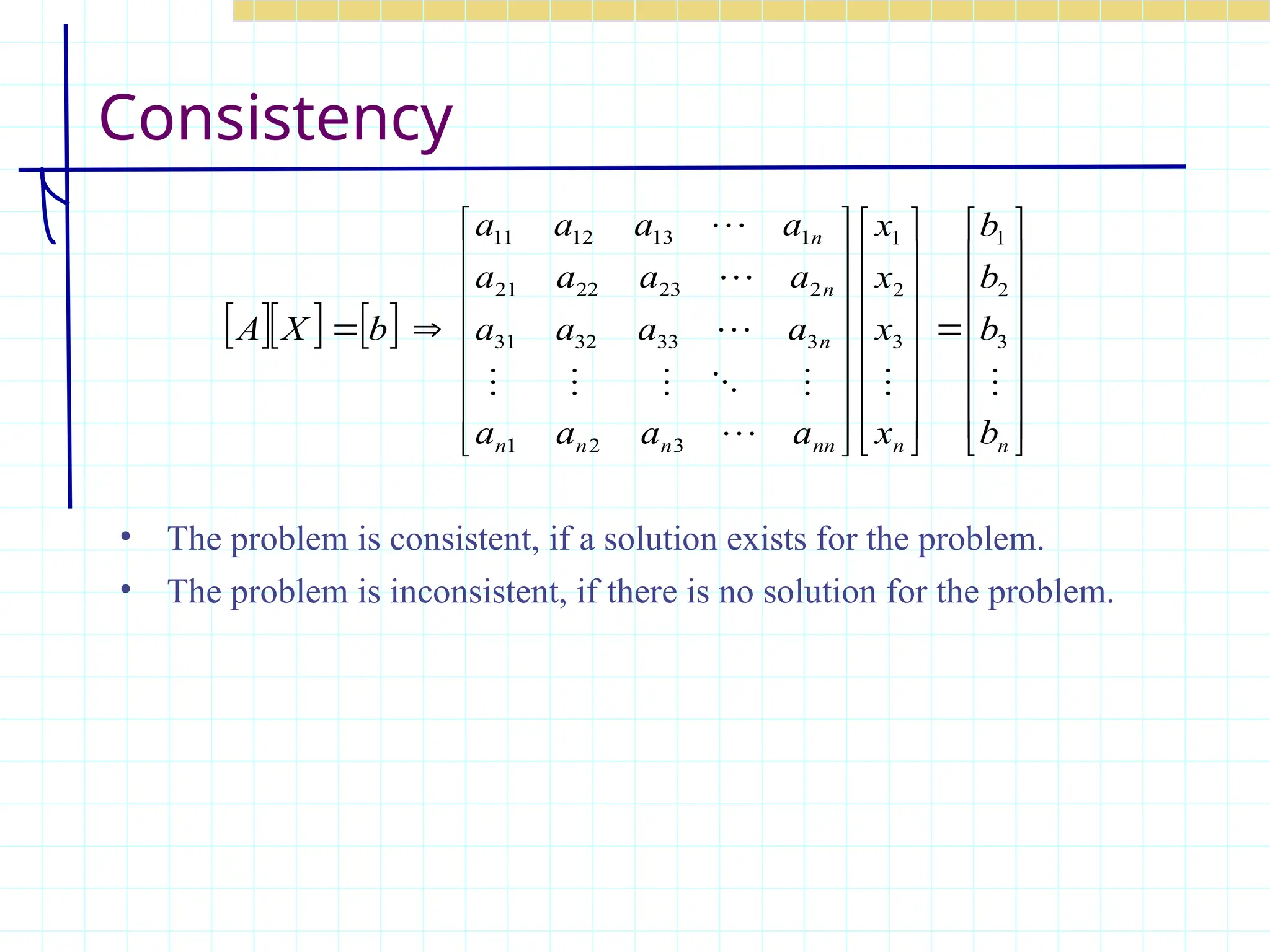
For an n x n system, rank(A) = n automatically
guarantees
that the system is consistent.
• The columns of A are linearly independent
• The rows of A are linearly independent
• rank(A) = n
• det(A) != 0
• A-1
exists;
• The solution to [A]{x} ={b} exist and is unique.](https://image.slidesharecdn.com/lec10gausselimination1-240819130116-d06ba98c/75/lec-10-gauss-elimination-mathematics-note-for-engineering-subject-8-2048.jpg)
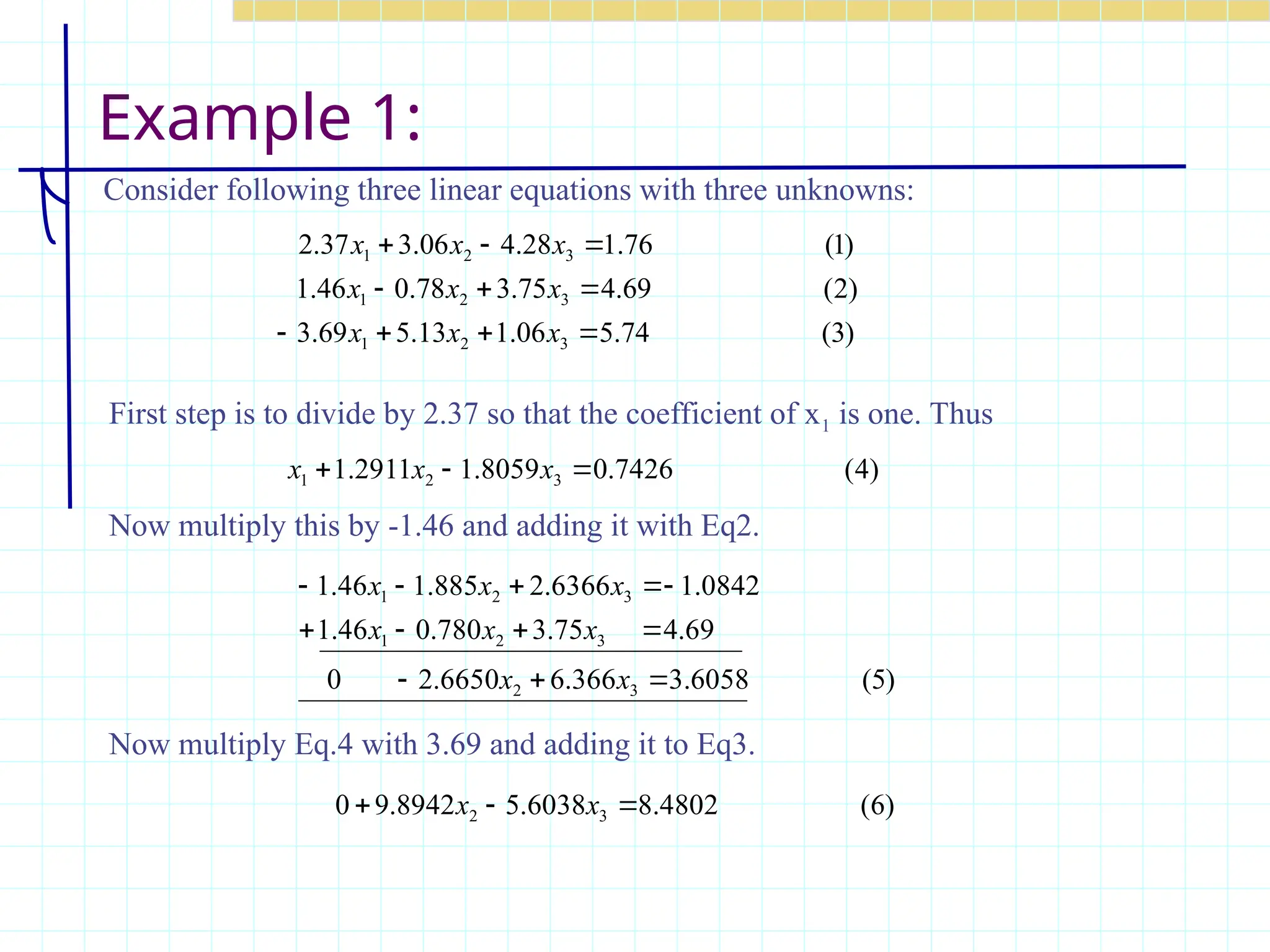
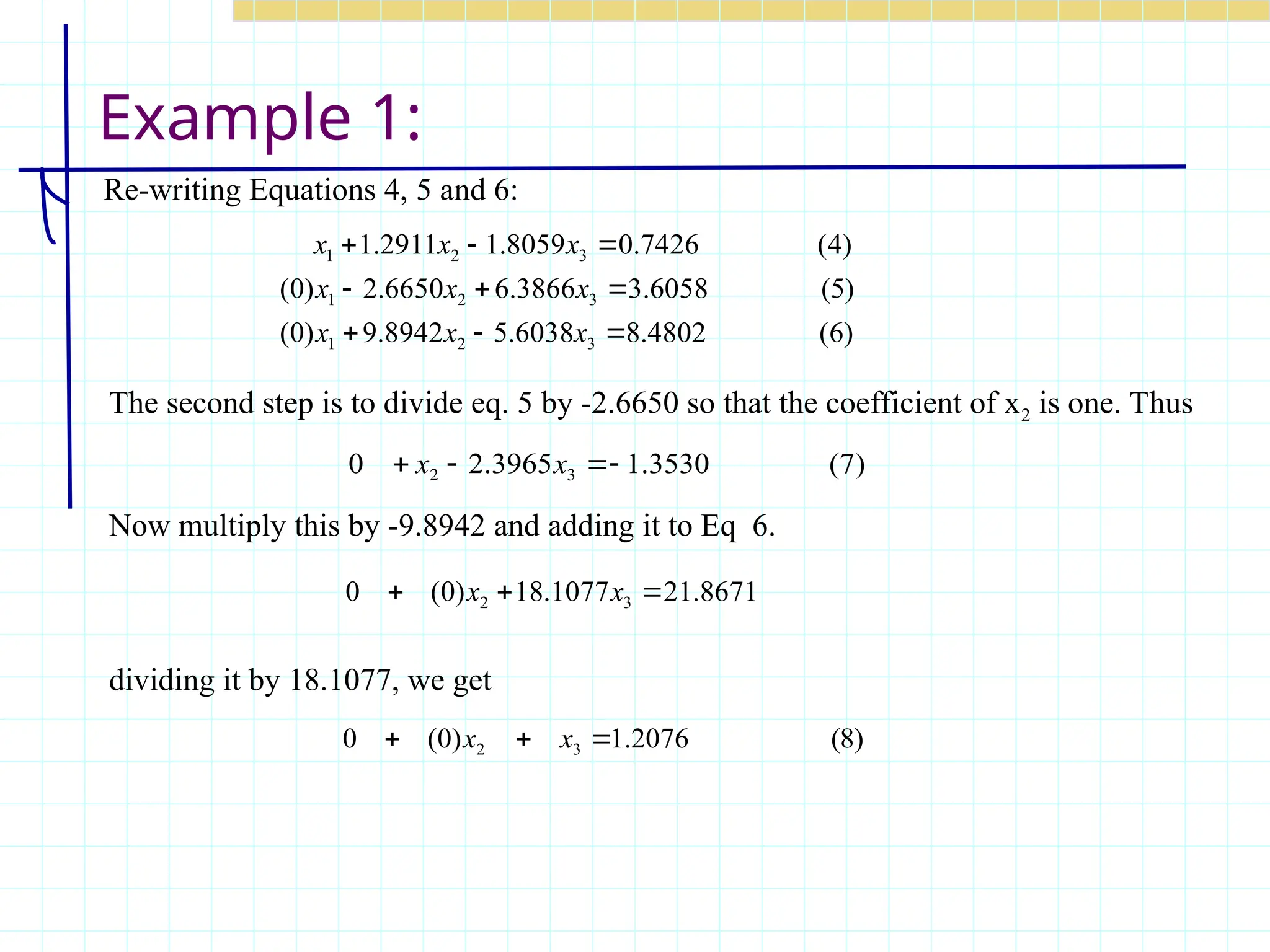
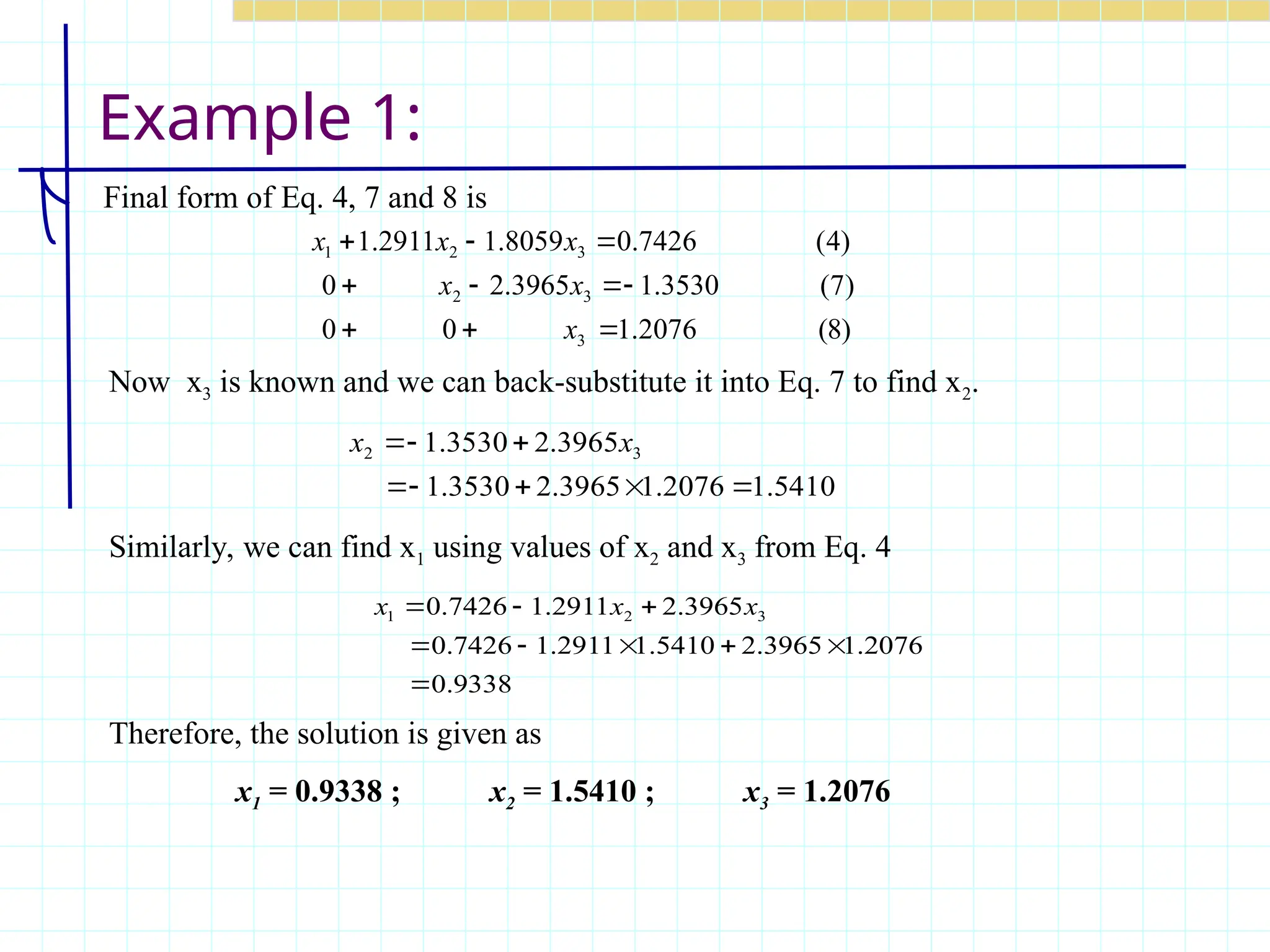
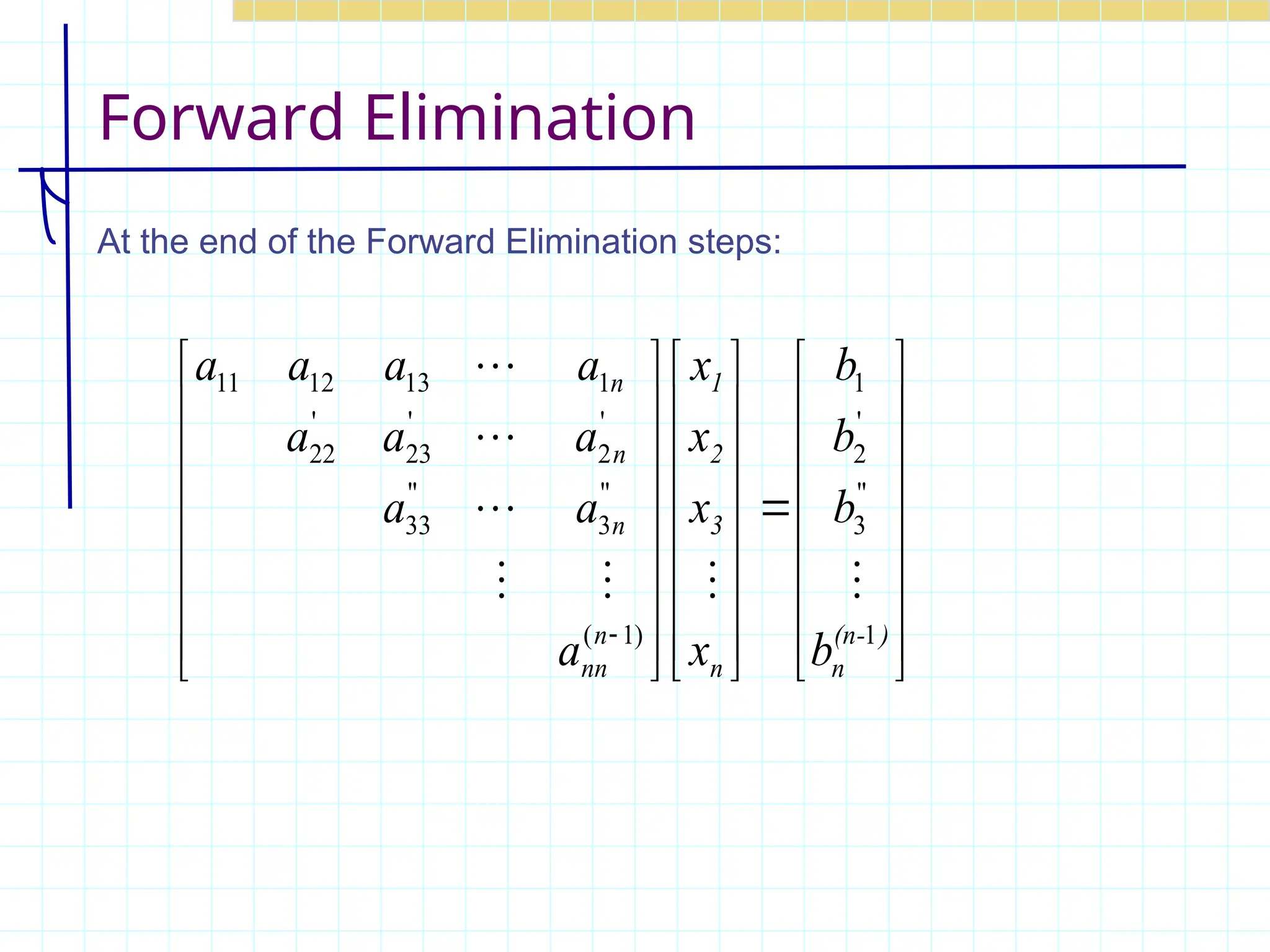
![Gaussian Elimination
Gaussian Elimination is one of the most popular techniques for
solving simultaneous linear equations of the form: [A][X] =[b]
The method consists of 2 steps
1. Forward Elimination of Unknowns.
2. Back Substitution
Let us learn the method first by examples:
m
n
mn
m
m
m
n
n
n
n
n
n
b
x
a
x
a
x
a
x
a
b
x
a
x
a
x
a
x
a
b
x
a
x
a
x
a
x
a
b
x
a
x
a
x
a
x
a
3
3
2
2
1
1
3
3
3
33
2
32
1
31
2
2
3
23
2
22
1
21
1
1
3
13
2
12
1
11](https://image.slidesharecdn.com/lec10gausselimination1-240819130116-d06ba98c/75/lec-10-gauss-elimination-mathematics-note-for-engineering-subject-10-2048.jpg)
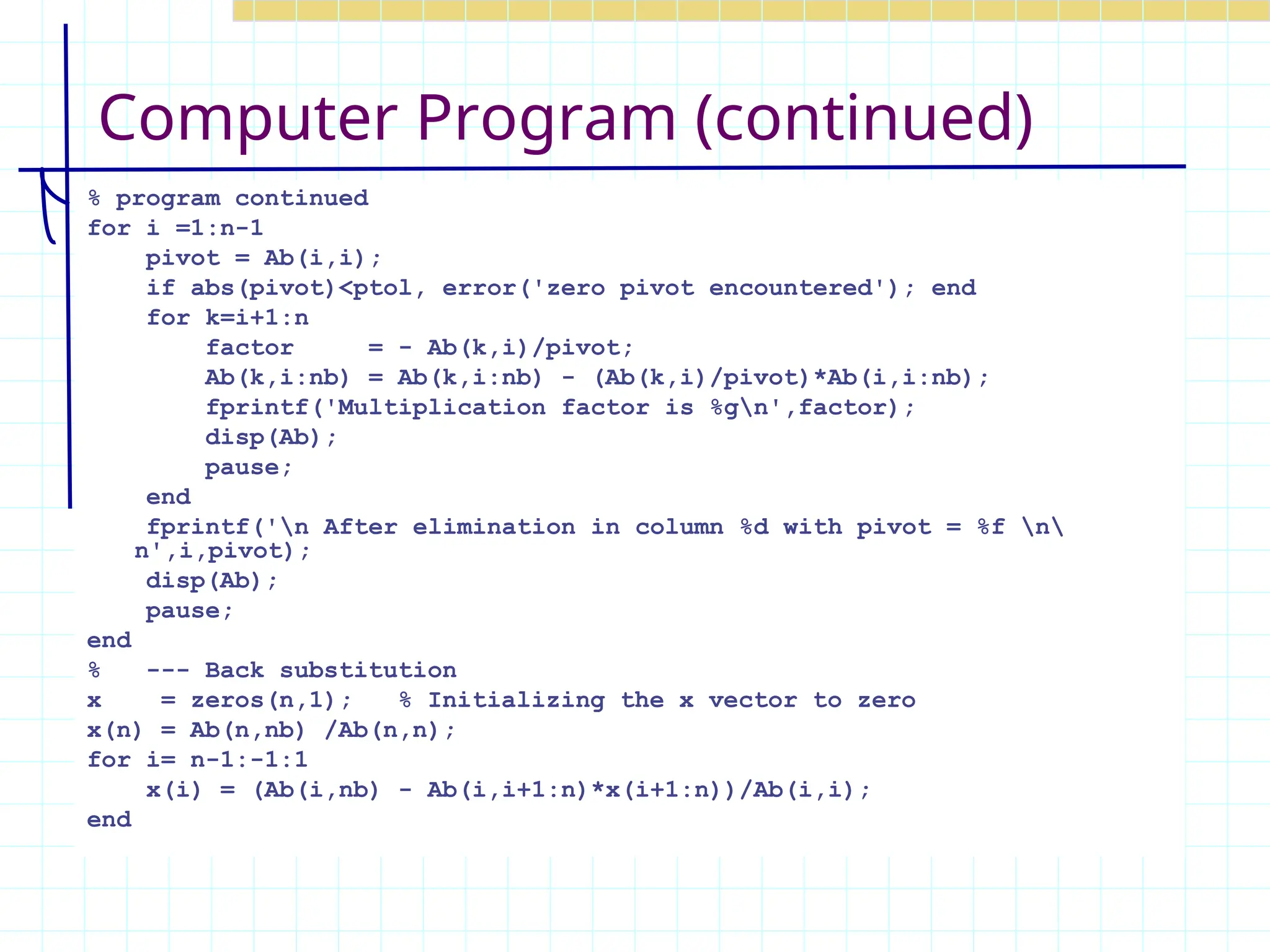
![Computer Program
function x = gaussE(A,b,ptol)
% GEdemo Show steps in Gauss elimination and back substitution
% No pivoting is used.
%
% Synopsis: x = GEdemo(A,b)
% x = GEdemo(A,b,ptol)
%
% Input: A,b = coefficient matrix and right hand side vector
% ptol = (optional) tolerance for detection of zero pivot
% Default: ptol = 50 * eps
%
% Output: x = solution vector, if solution exists
A=[25 5 1; 64 8 1; 144 12 1]
b=[106.8; 177.2; 279.2]
if nargin<3, ptol = 50*eps; end
[m,n] = size(A);
if m~=n, error('A matrix needs to be square'); end
nb = n+1; Ab = [A b]; % Augmented system
fprintf('n Begin forward elimination with Augmented system;n'); disp(Ab);
% --- Elimination](https://image.slidesharecdn.com/lec10gausselimination1-240819130116-d06ba98c/75/lec-10-gauss-elimination-mathematics-note-for-engineering-subject-26-2048.jpg)