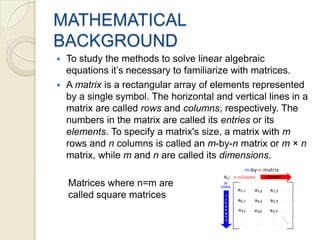
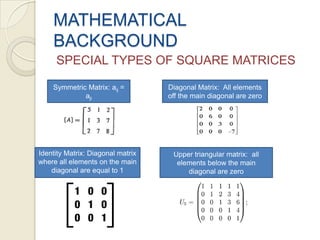
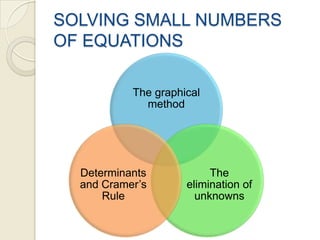
1. This document discusses methods for solving linear algebraic equations and operations involving matrices. It covers topics such as matrix definitions, types of matrices, matrix operations, representing equations in matrix form, and methods for solving systems of linear equations including graphical methods, determinants, Cramer's rule, elimination, Gauss-Jordan, LU decomposition, and calculating the matrix inverse.
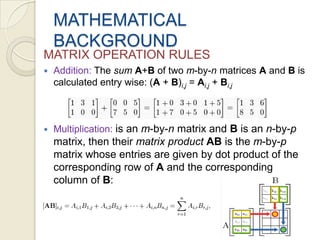
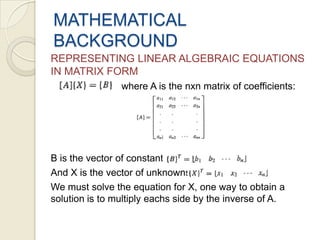
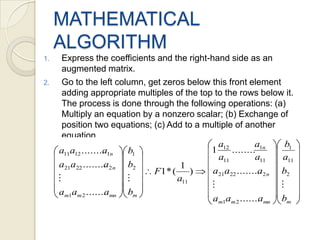
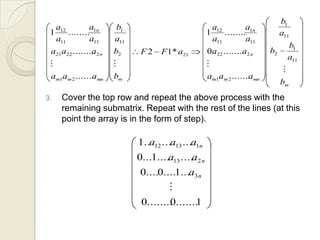
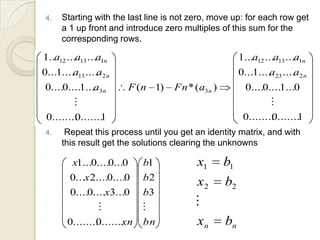
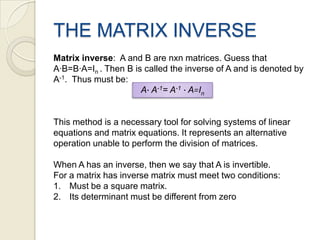
2. Key matrix operations include addition, multiplication, and rules for inverting a matrix. Methods for solving systems of equations include graphical techniques, determinants, Cramer's rule, elimination, Gauss, Gauss-Jordan, and LU decomposition.
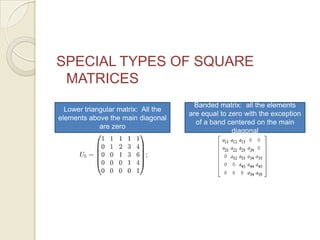
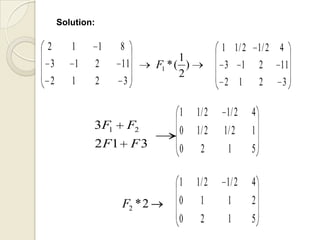
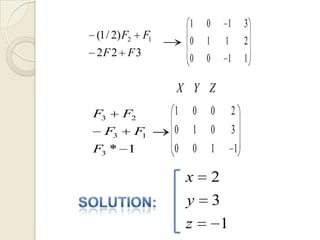
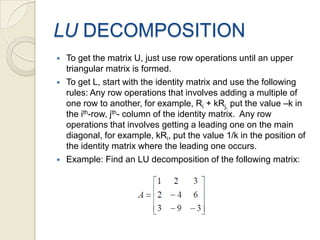
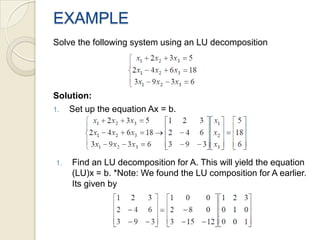
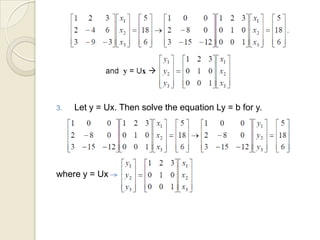
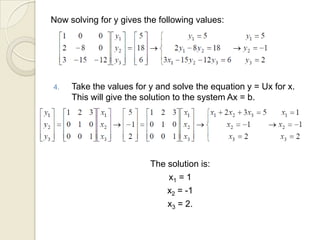
3. LU decomposition involves writing a matrix as the product of a lower and upper triangular matrix, which can