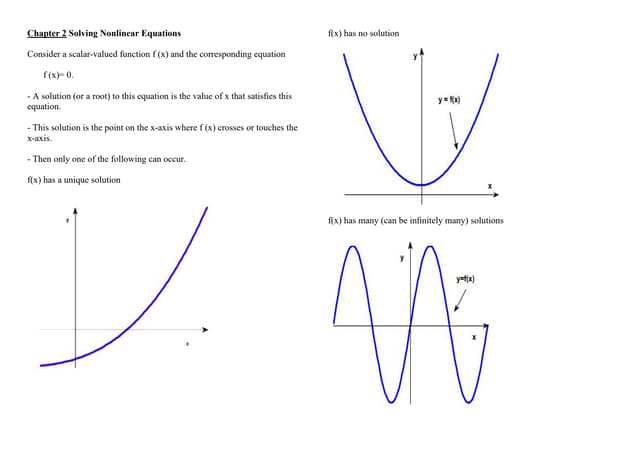
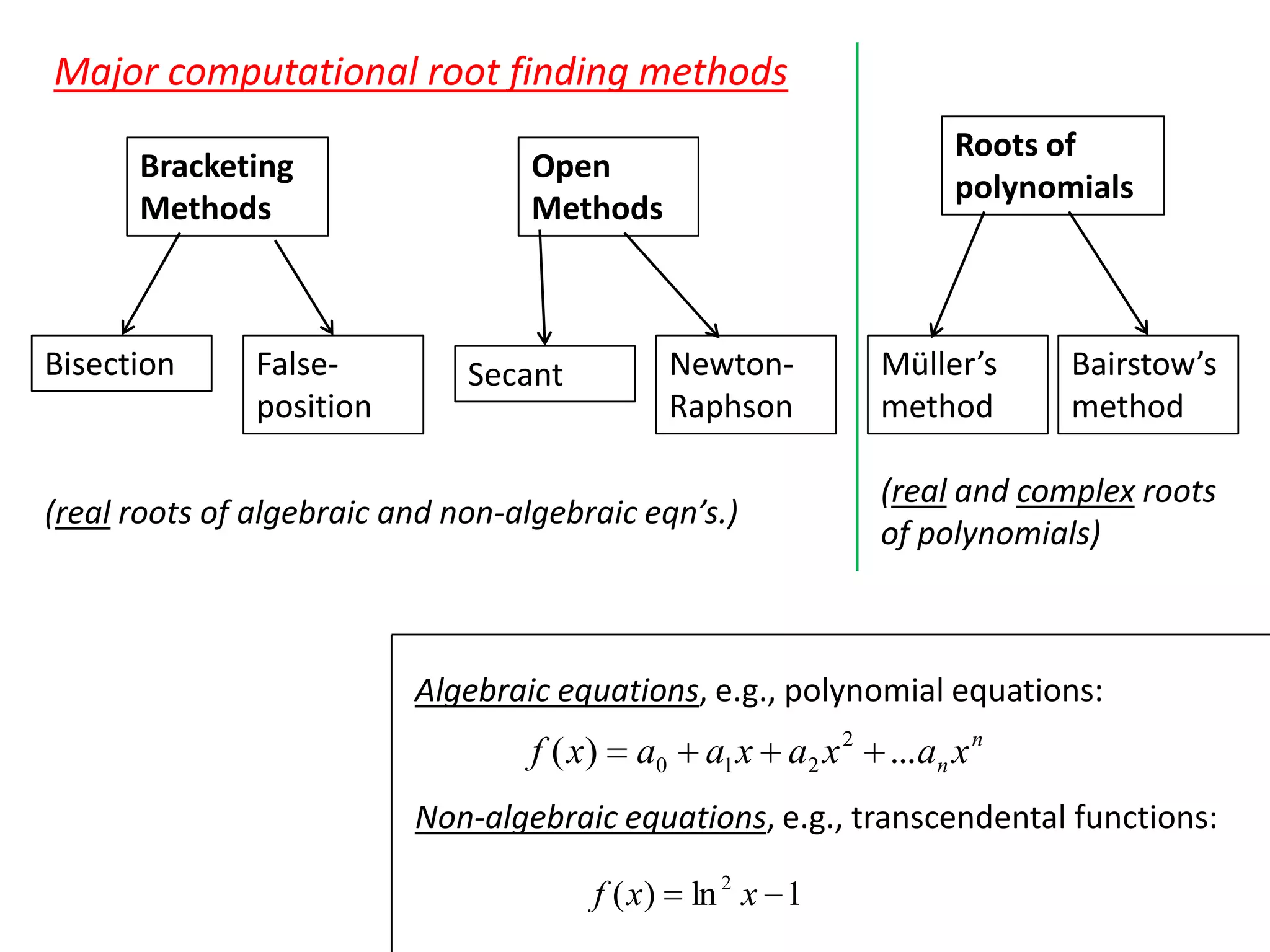
The document discusses various numerical methods for finding roots of functions, including:
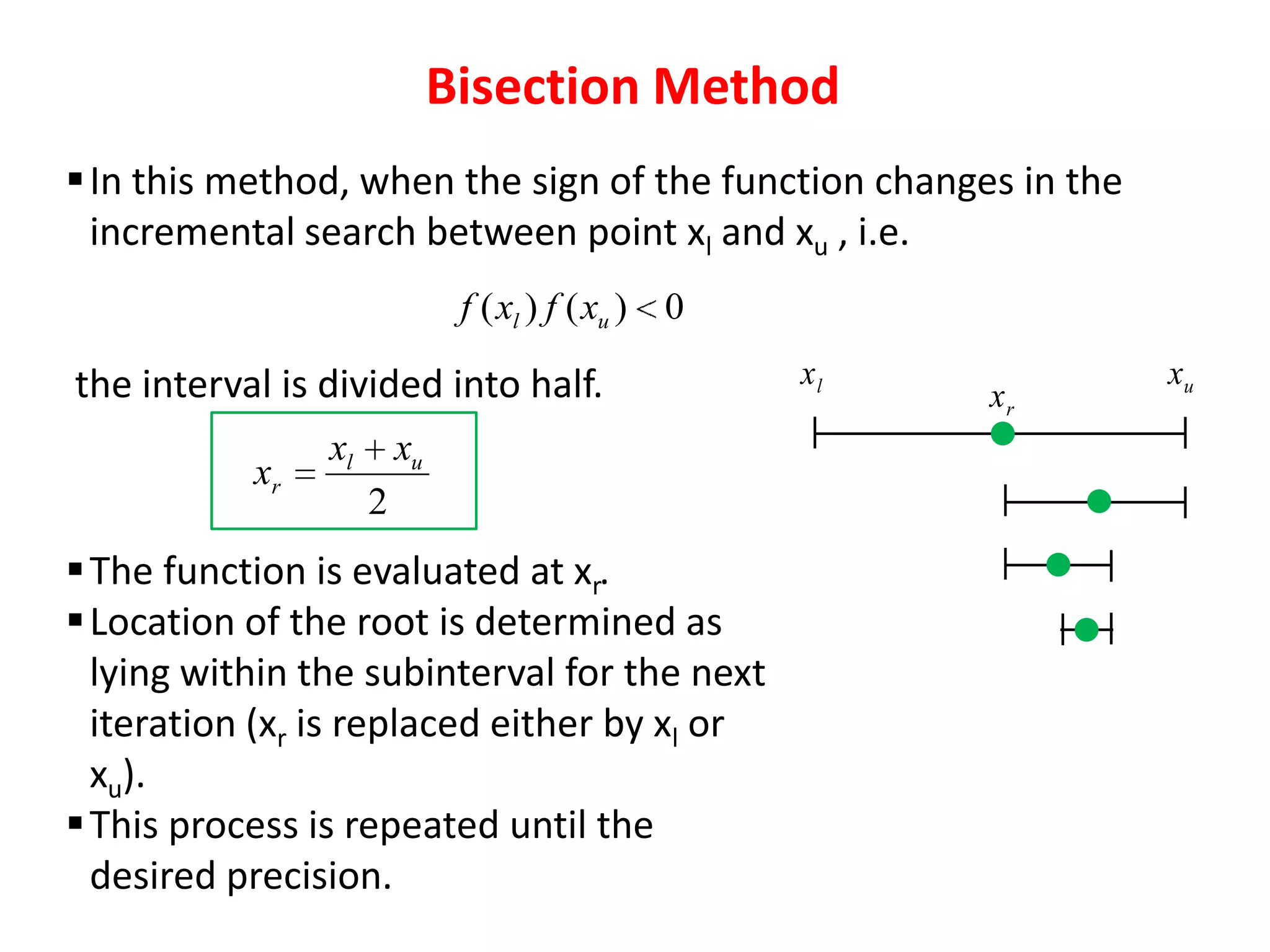
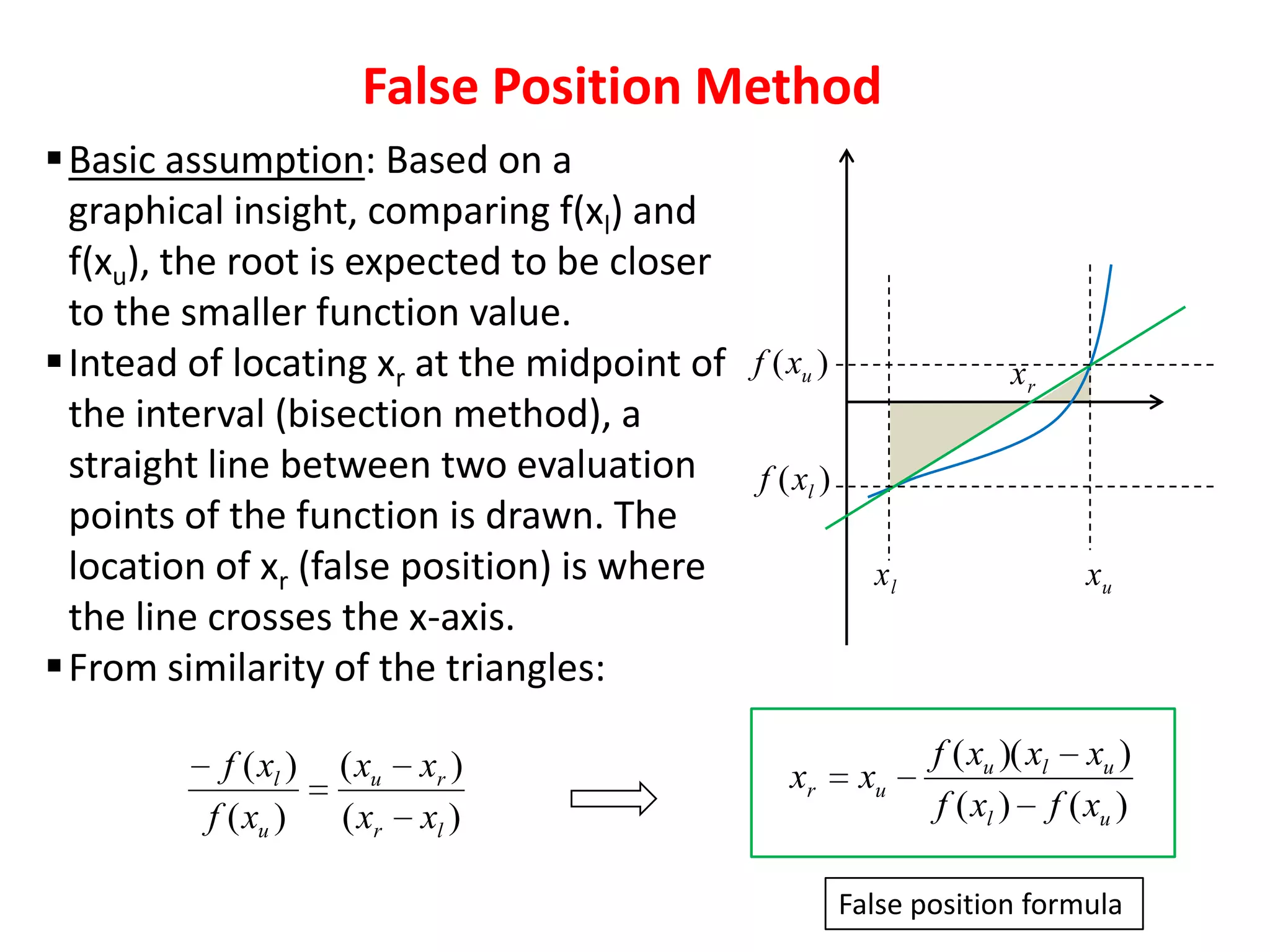
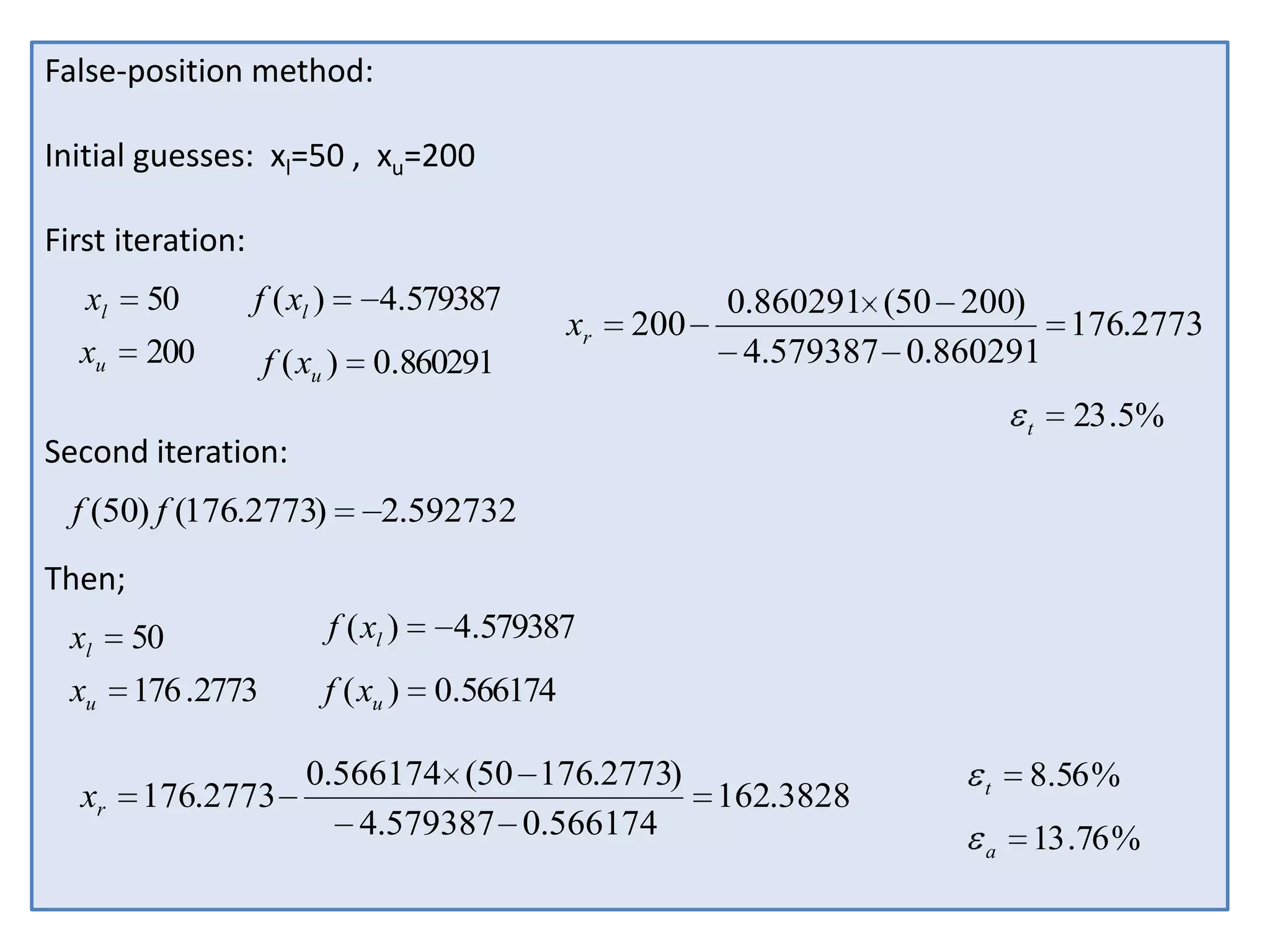
- Bracketing methods like bisection and false position that search between initial lower and upper bounds.
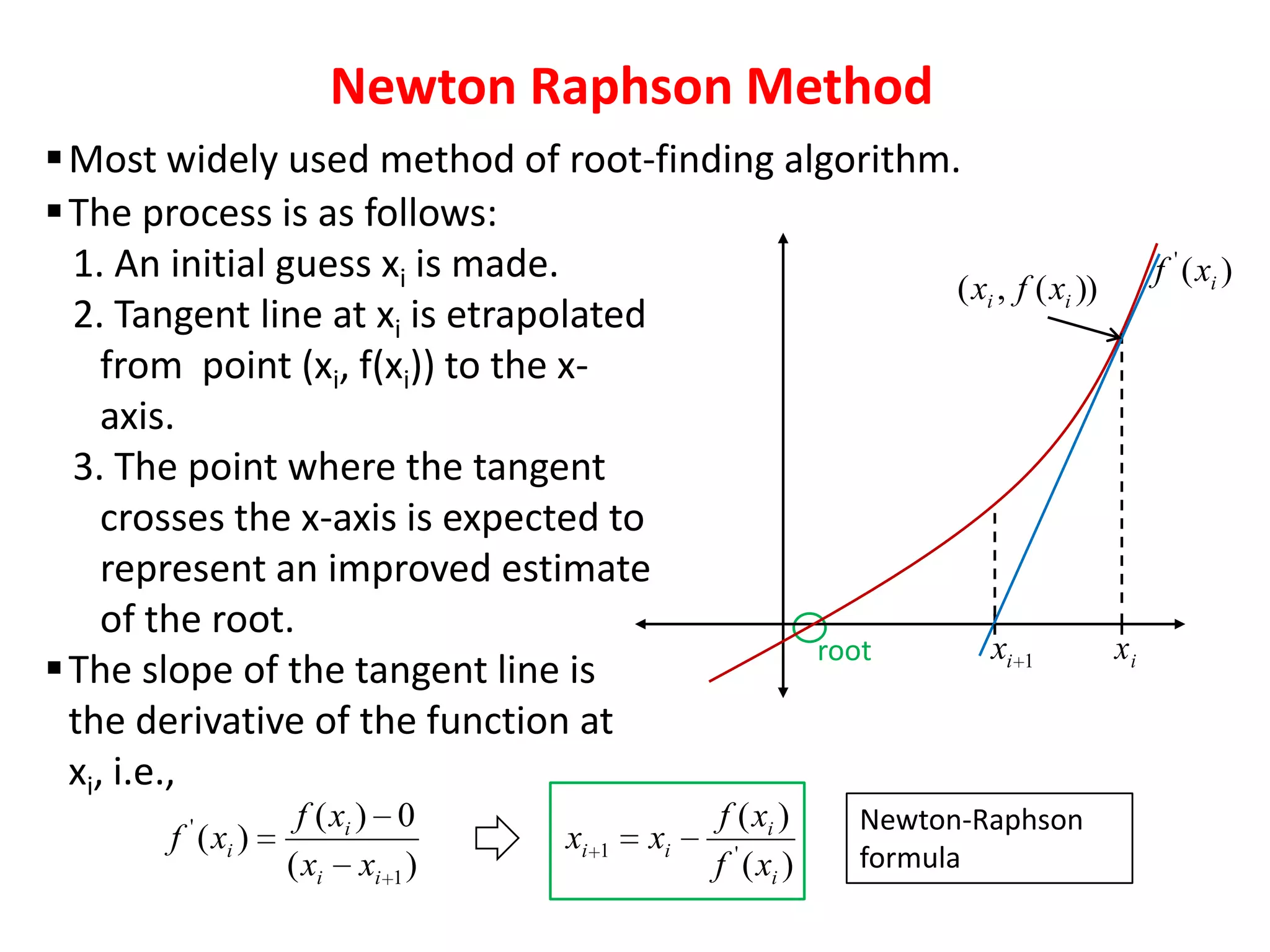
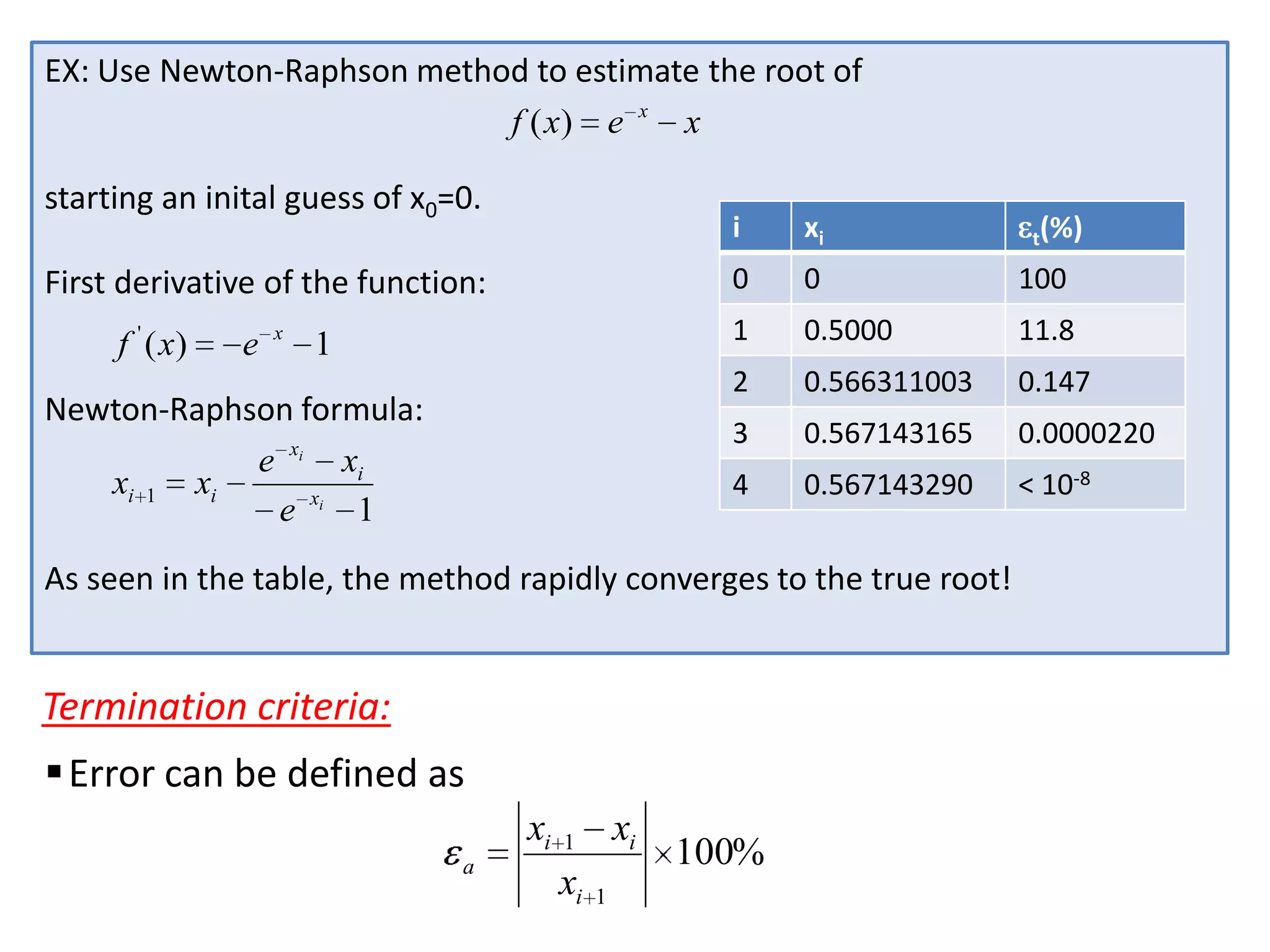
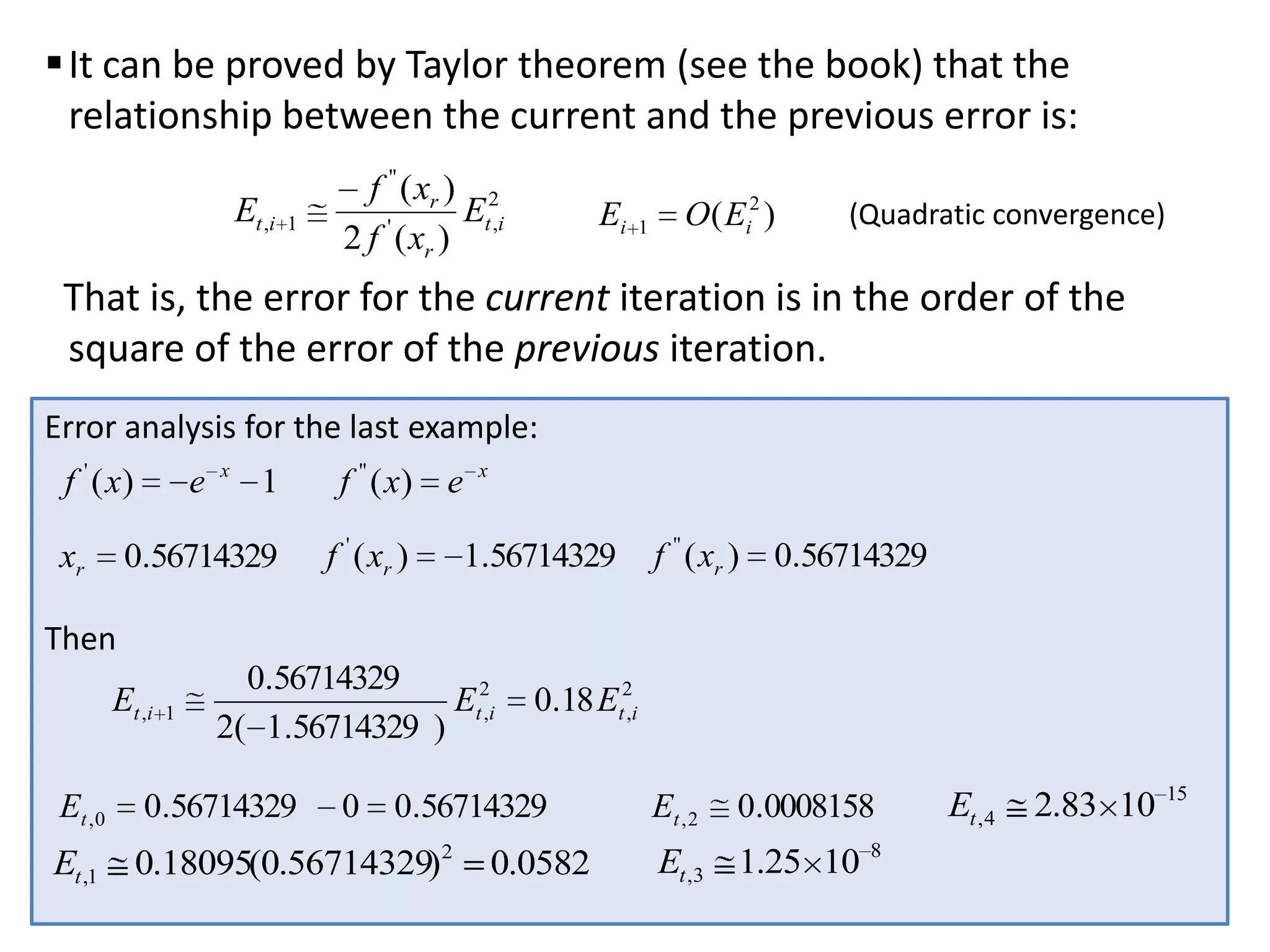
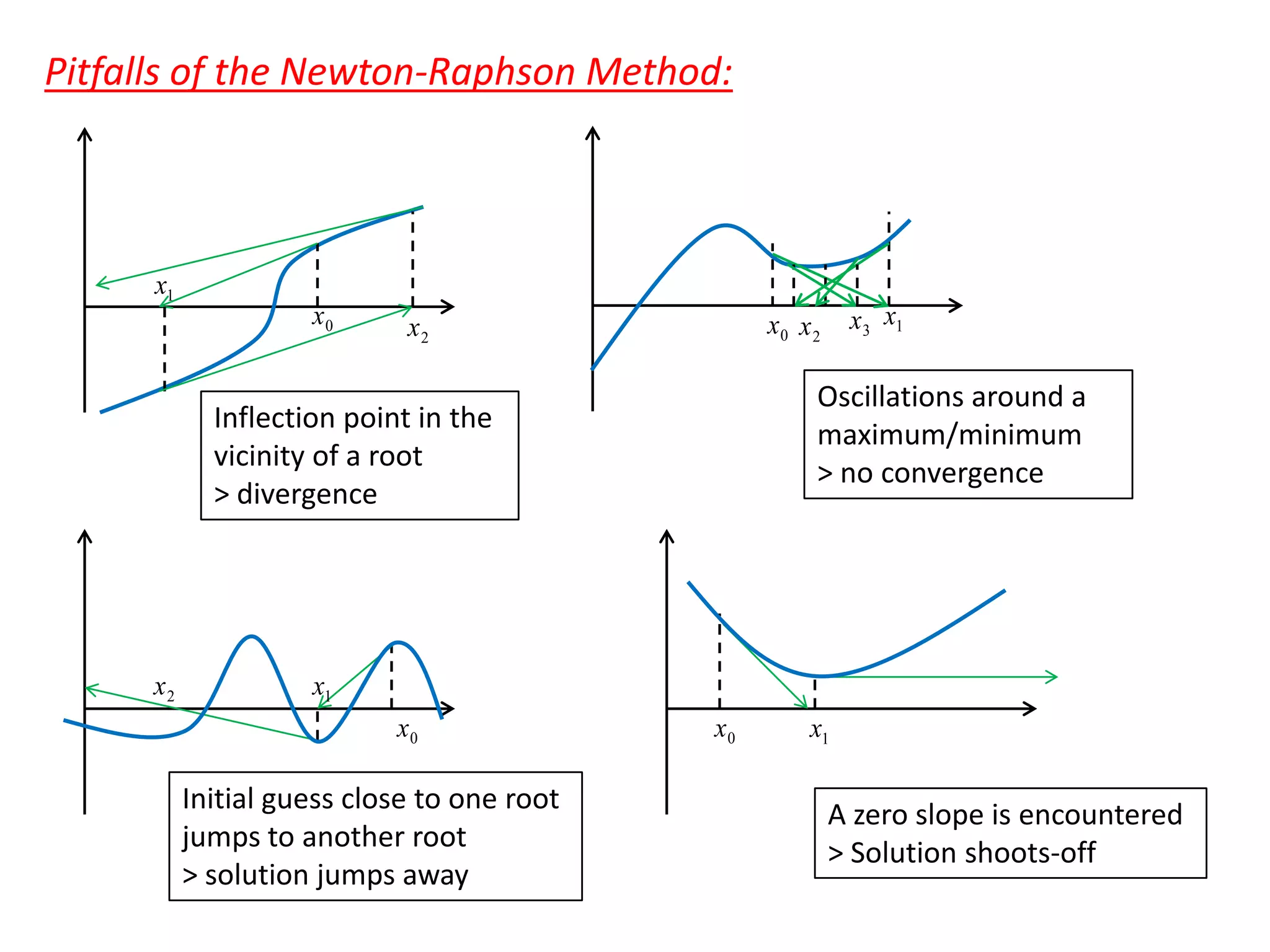
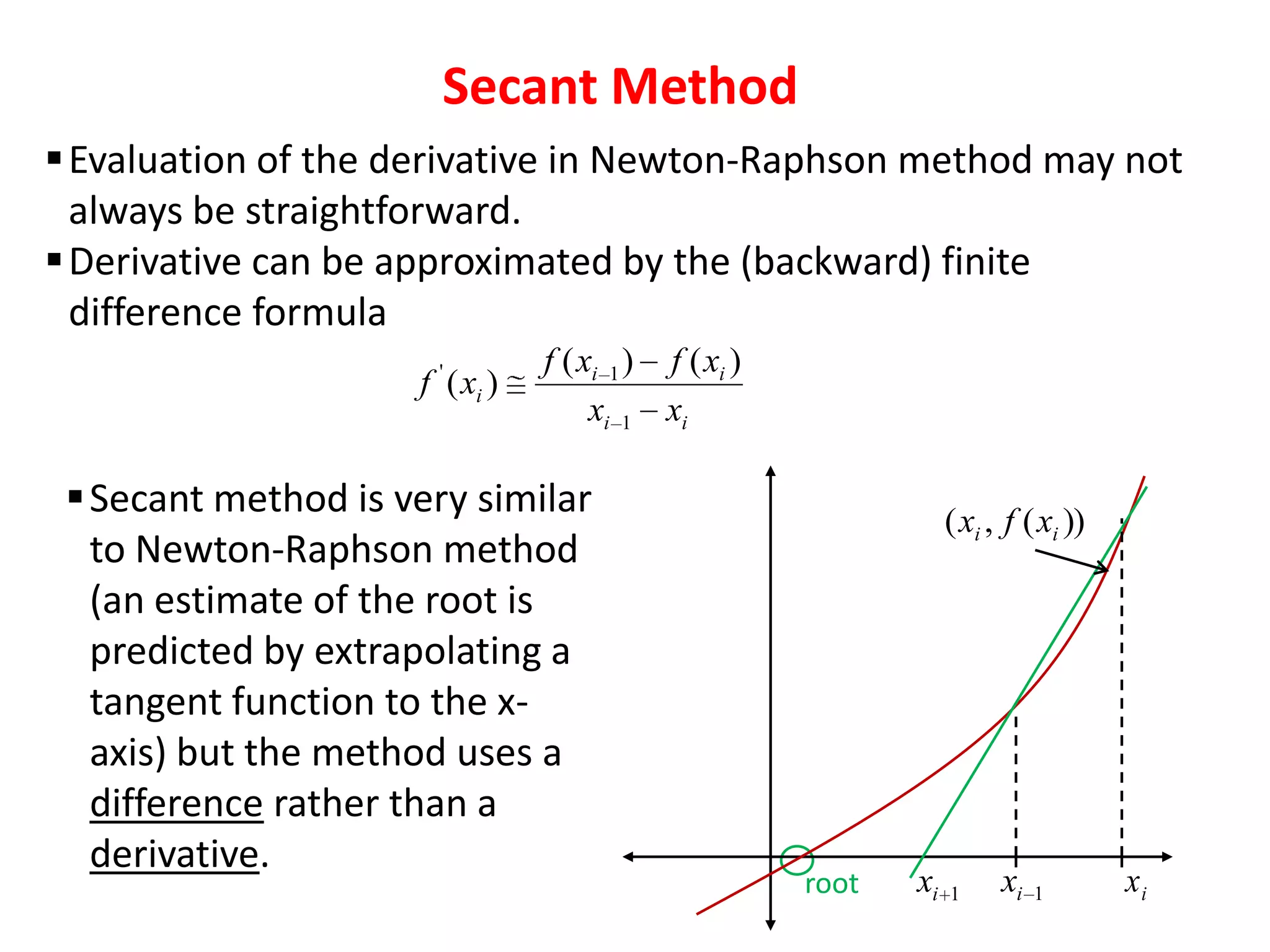
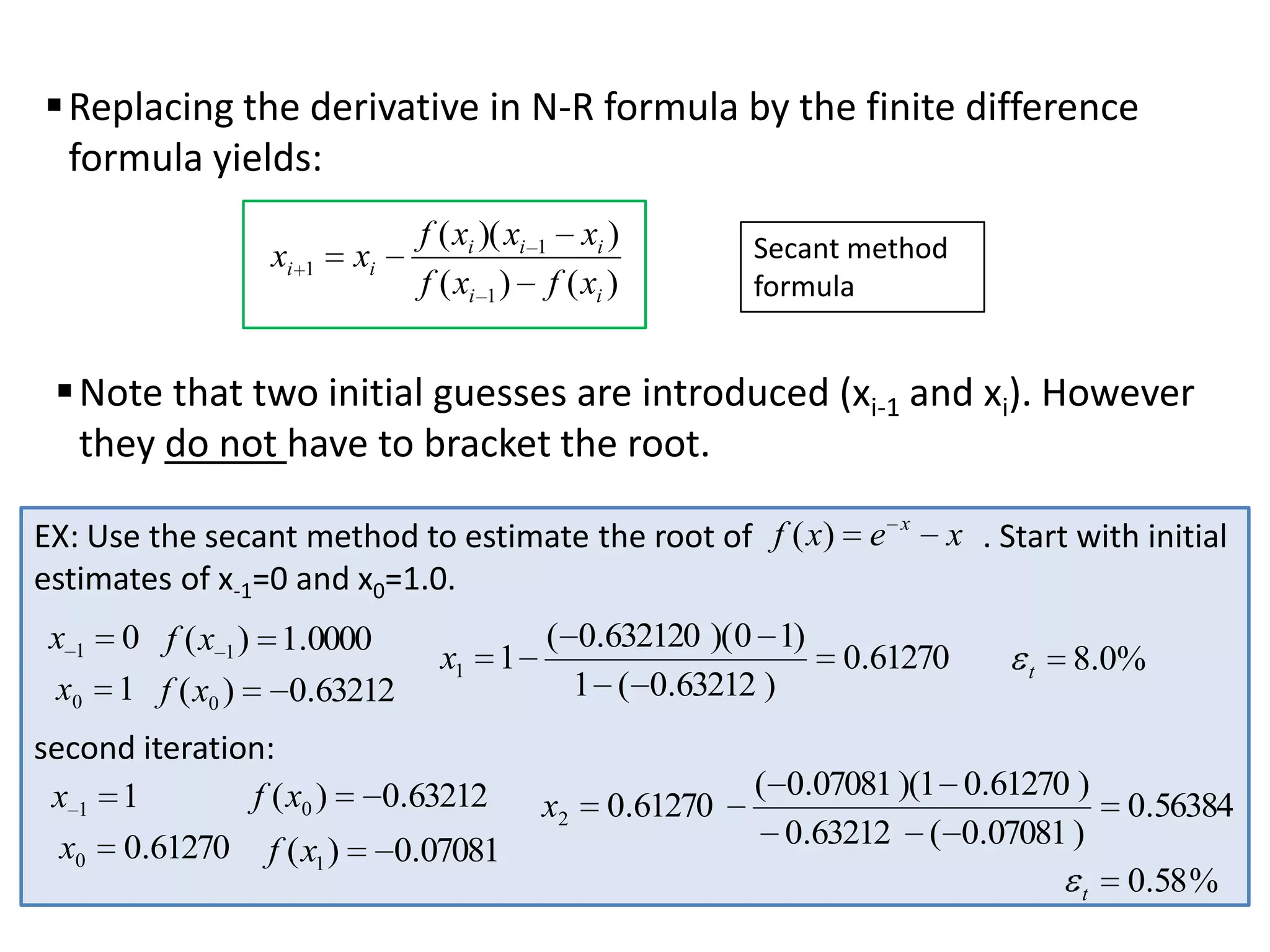
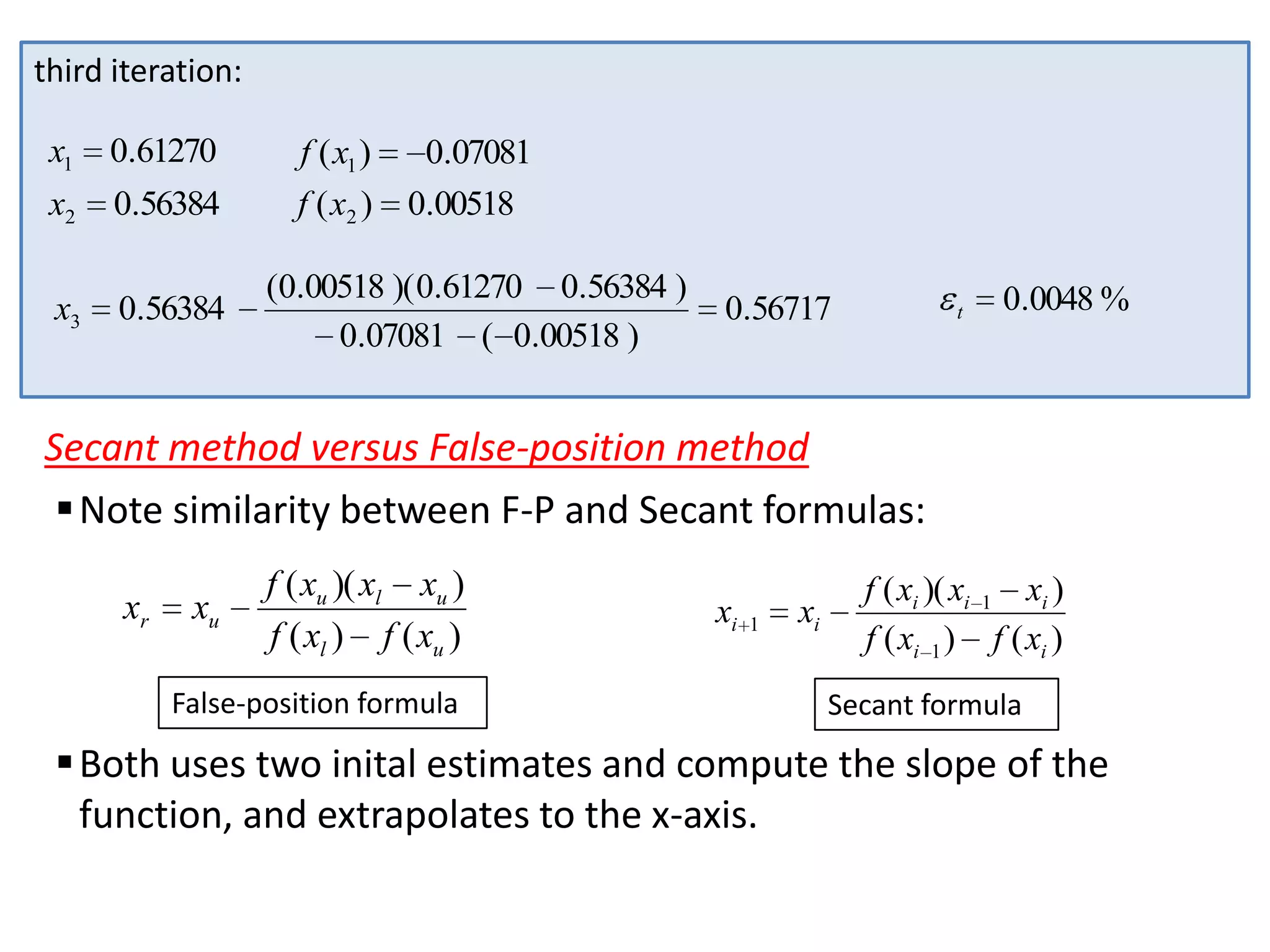
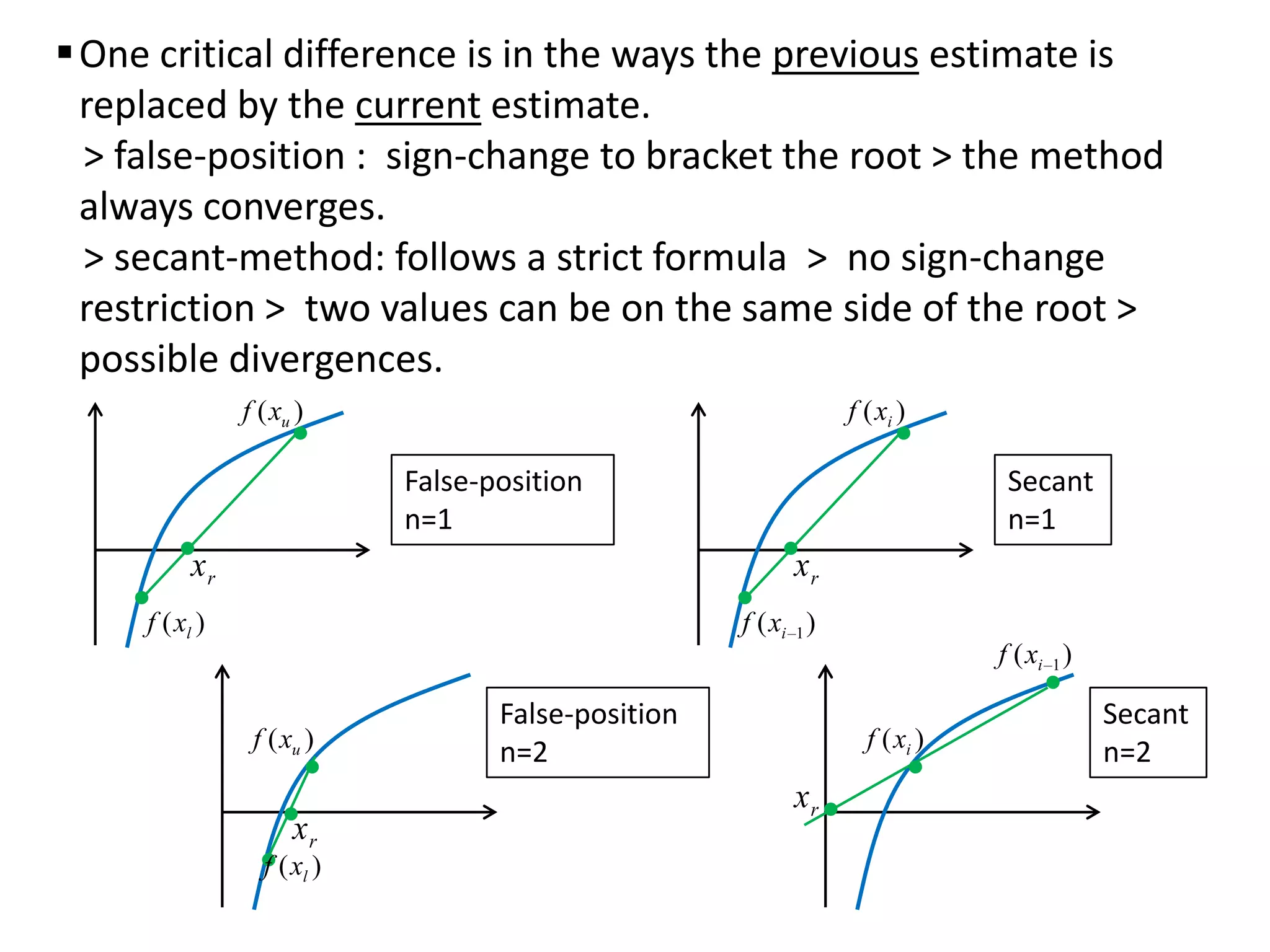
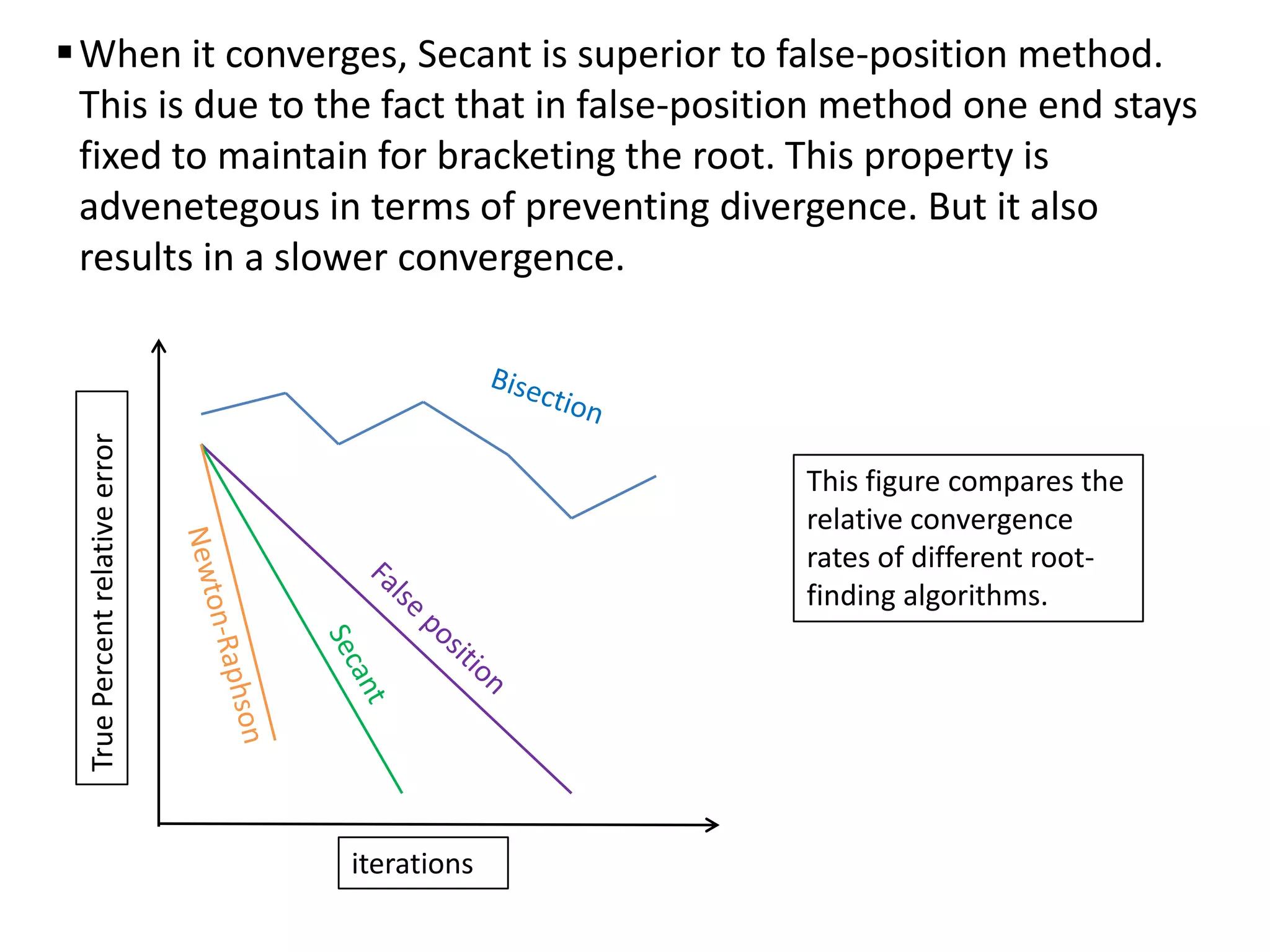
- Open methods like Newton-Raphson and secant that do not require bracketing but may not converge.
- Techniques for polynomials like Müller's and Bairstow's methods.
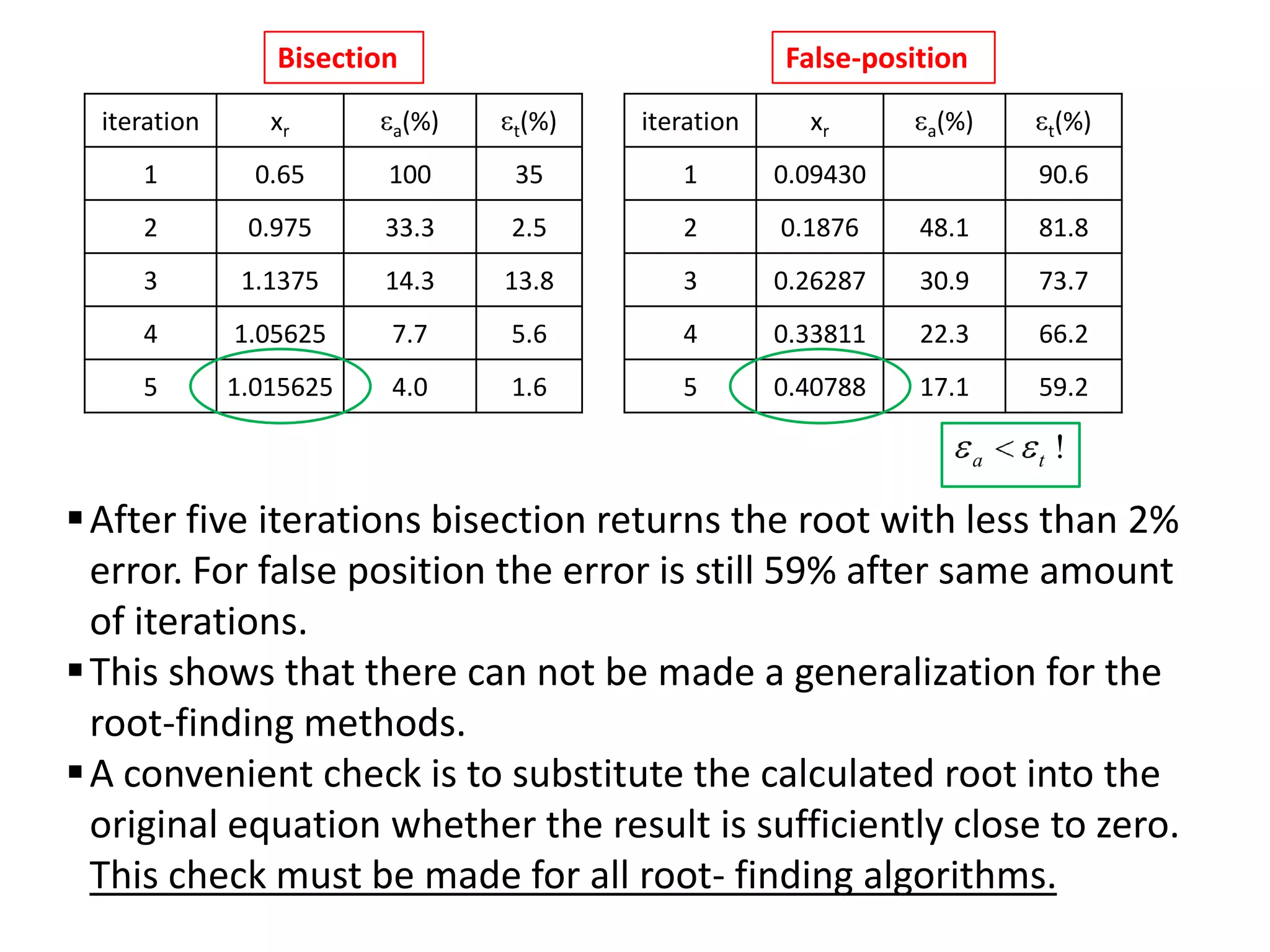
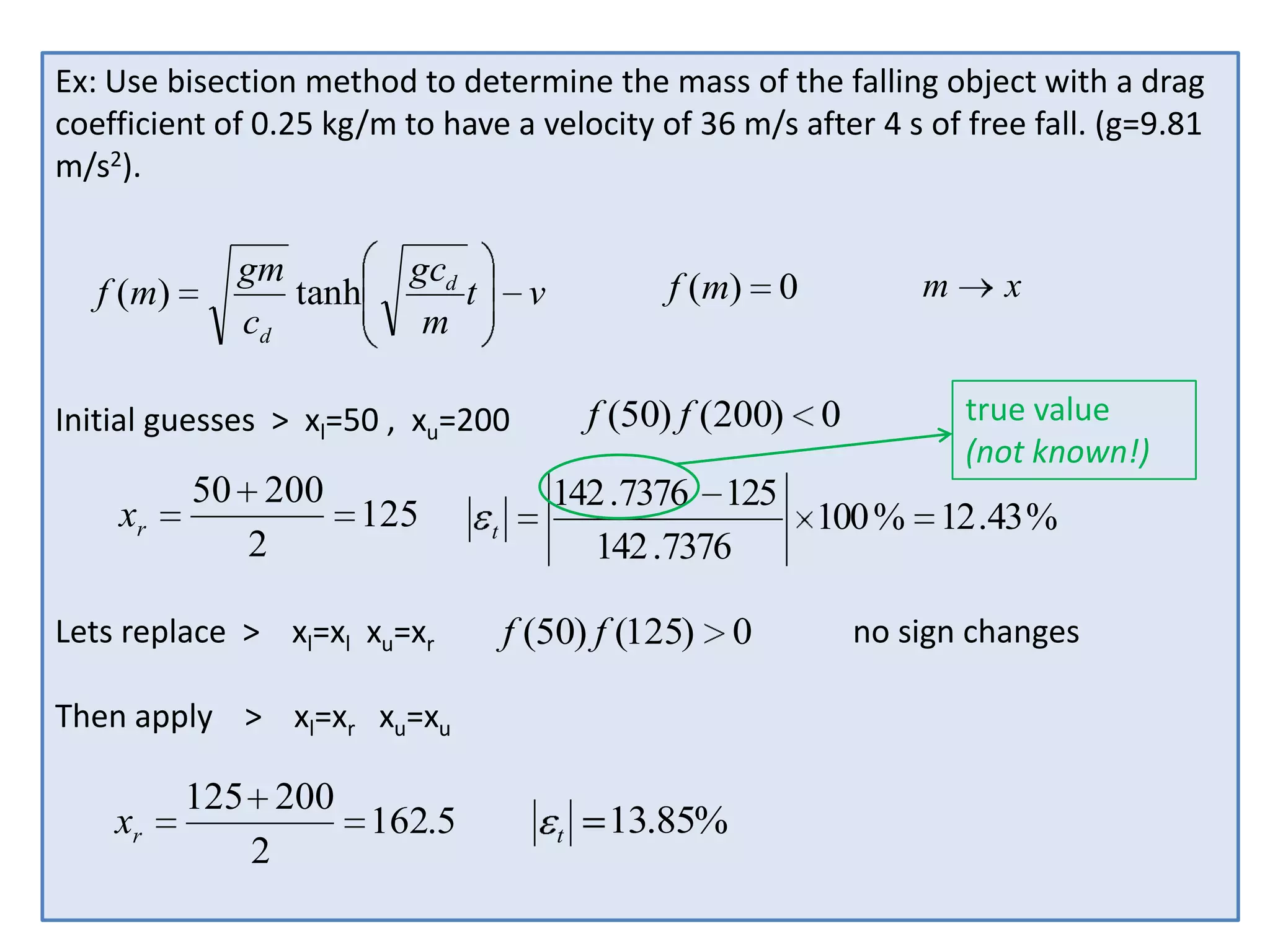
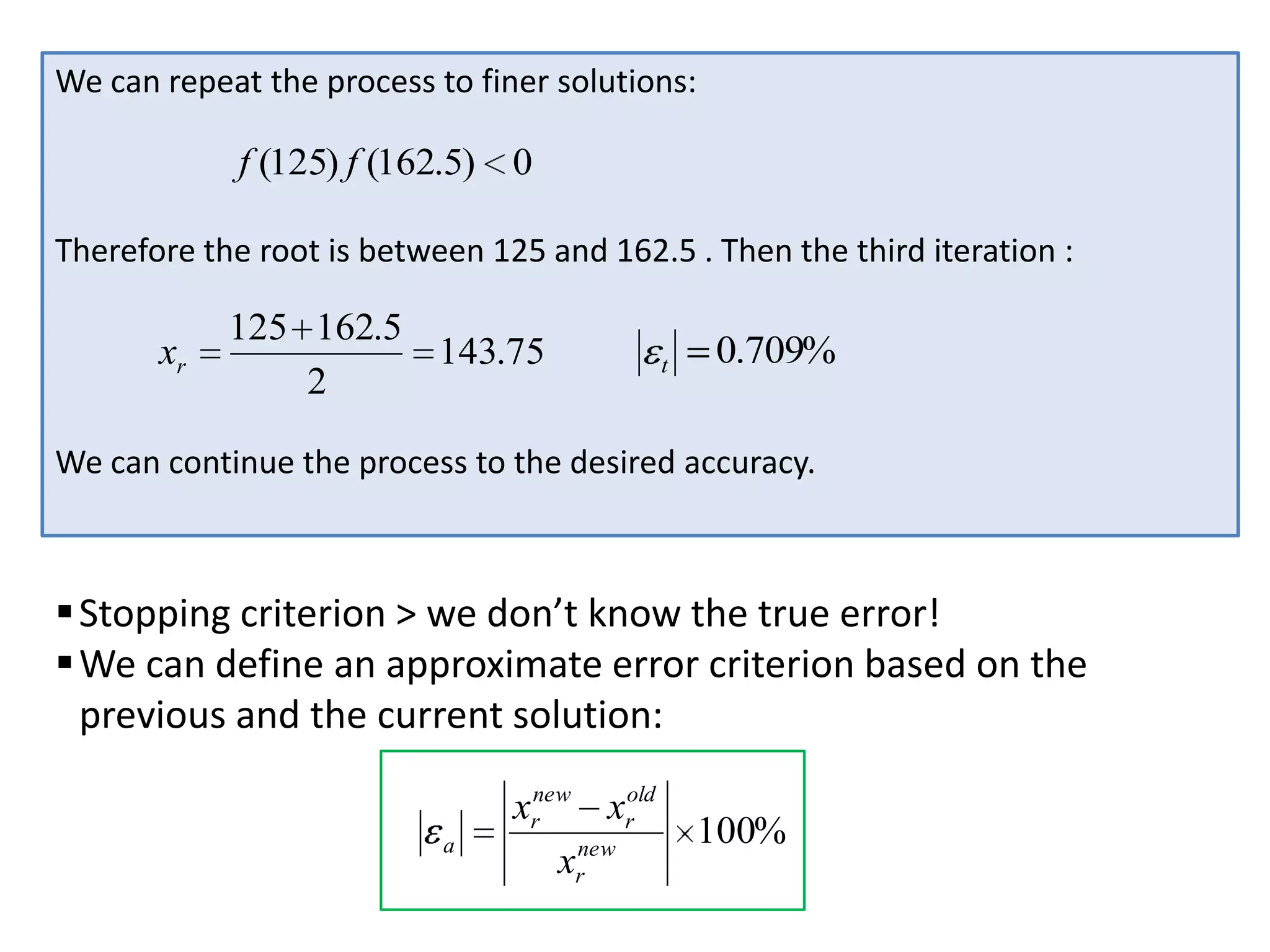
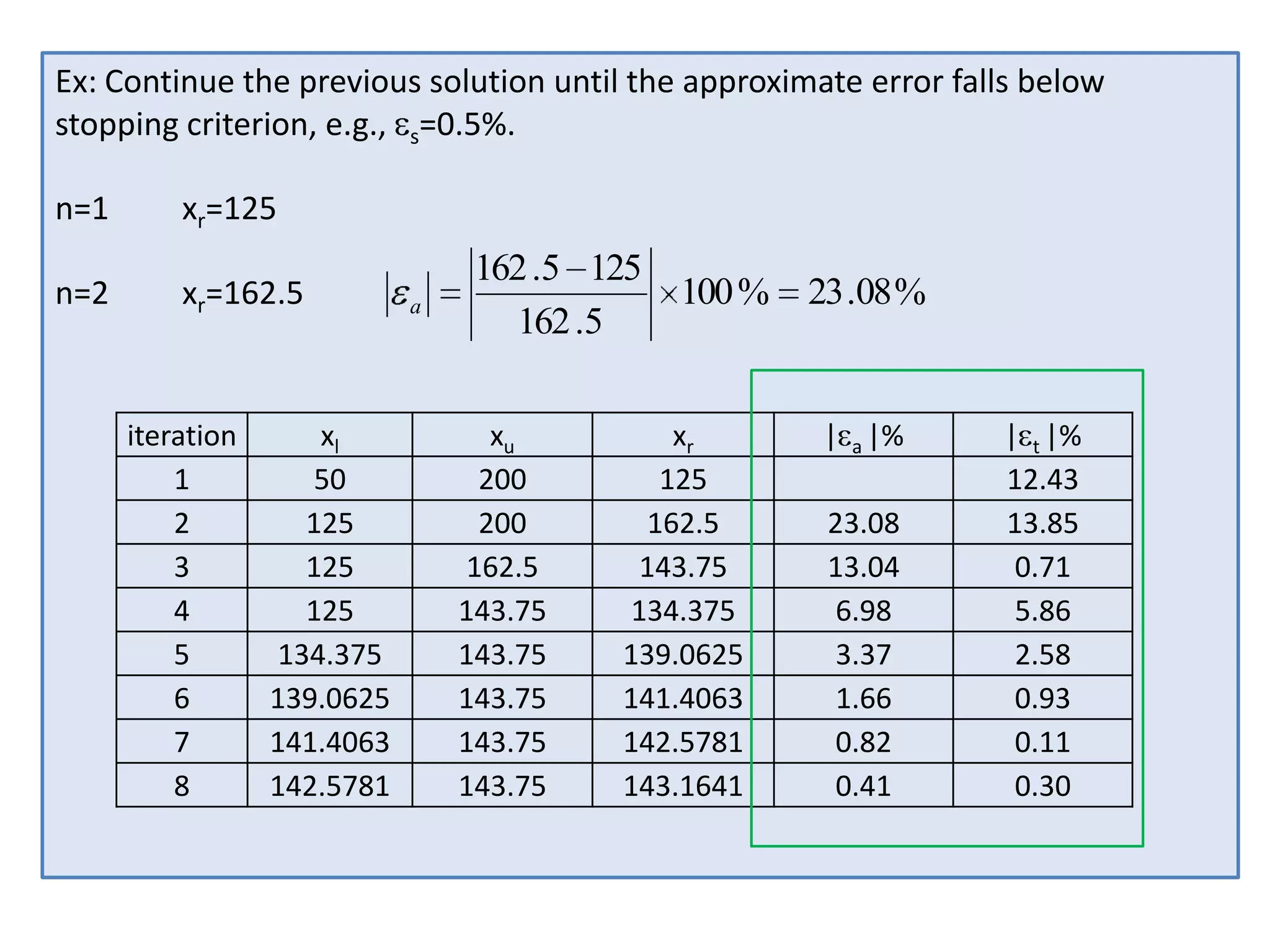
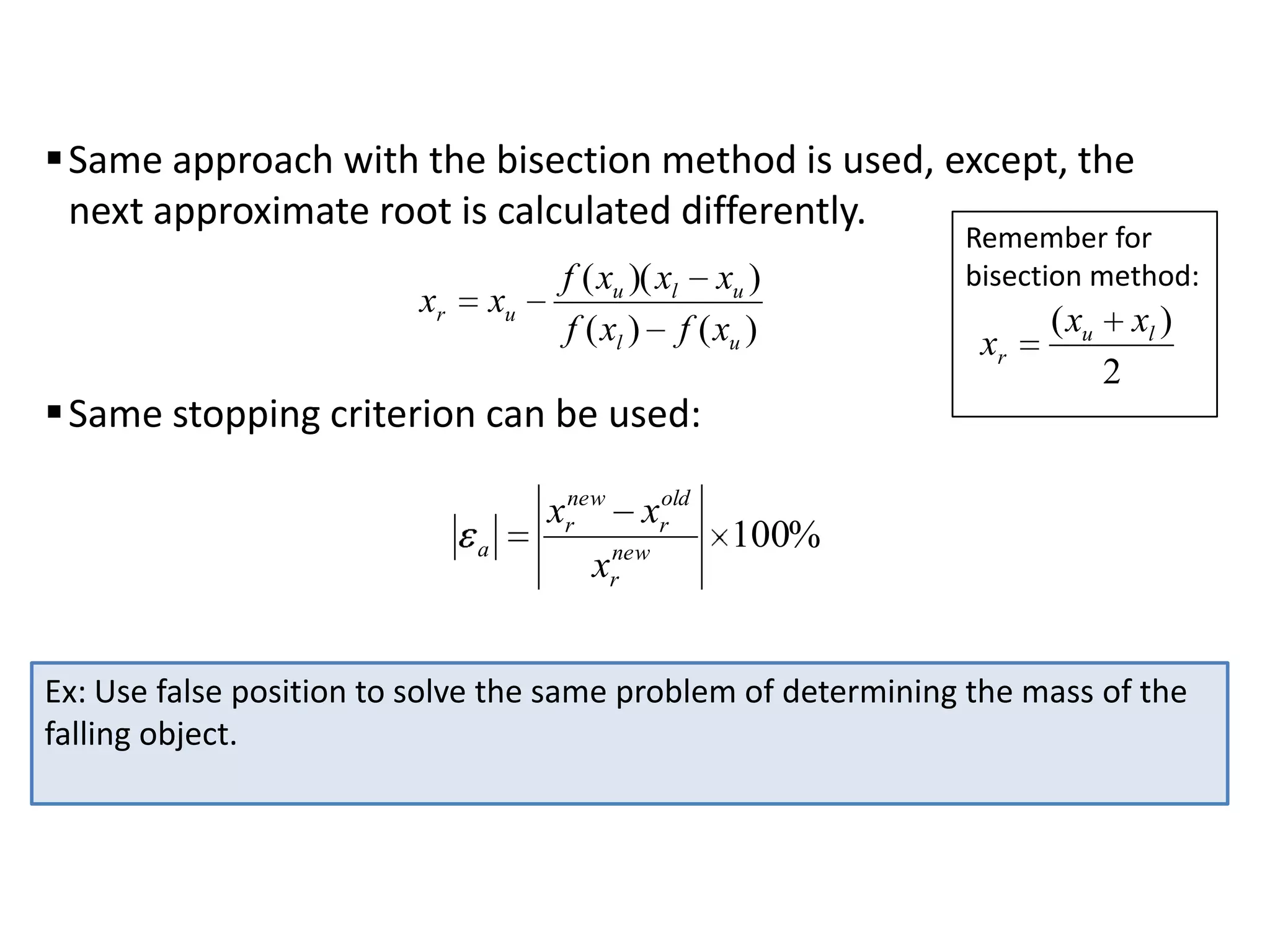
Examples demonstrate applying bisection, false position, and Newton-Raphson to find the mass in a falling object problem. The convergence properties and relative performance of the different methods are analyzed.

![Cases Bisection is preferable to False position
Although false position generally performs faster than
bisection, this is not always true. Consider, for example :
f ( x)
Search the root for interval [0, 1.3]
f (x)
xr
1.0
x
xl
xu
1.3
x10 1
Here, we observe that
convergence to the true root is
very slow.
One of the bracketing limits tend
to stay fixed which leads to poor
convergence.
Note that, in the example, basic
assumption of false-position that
the root is closer to the smaller
function evaluation value is
violated.](https://image.slidesharecdn.com/es272ch3a-131020141145-phpapp02/75/Es272-ch3a-19-2048.jpg)