This document discusses various interpolation methods:
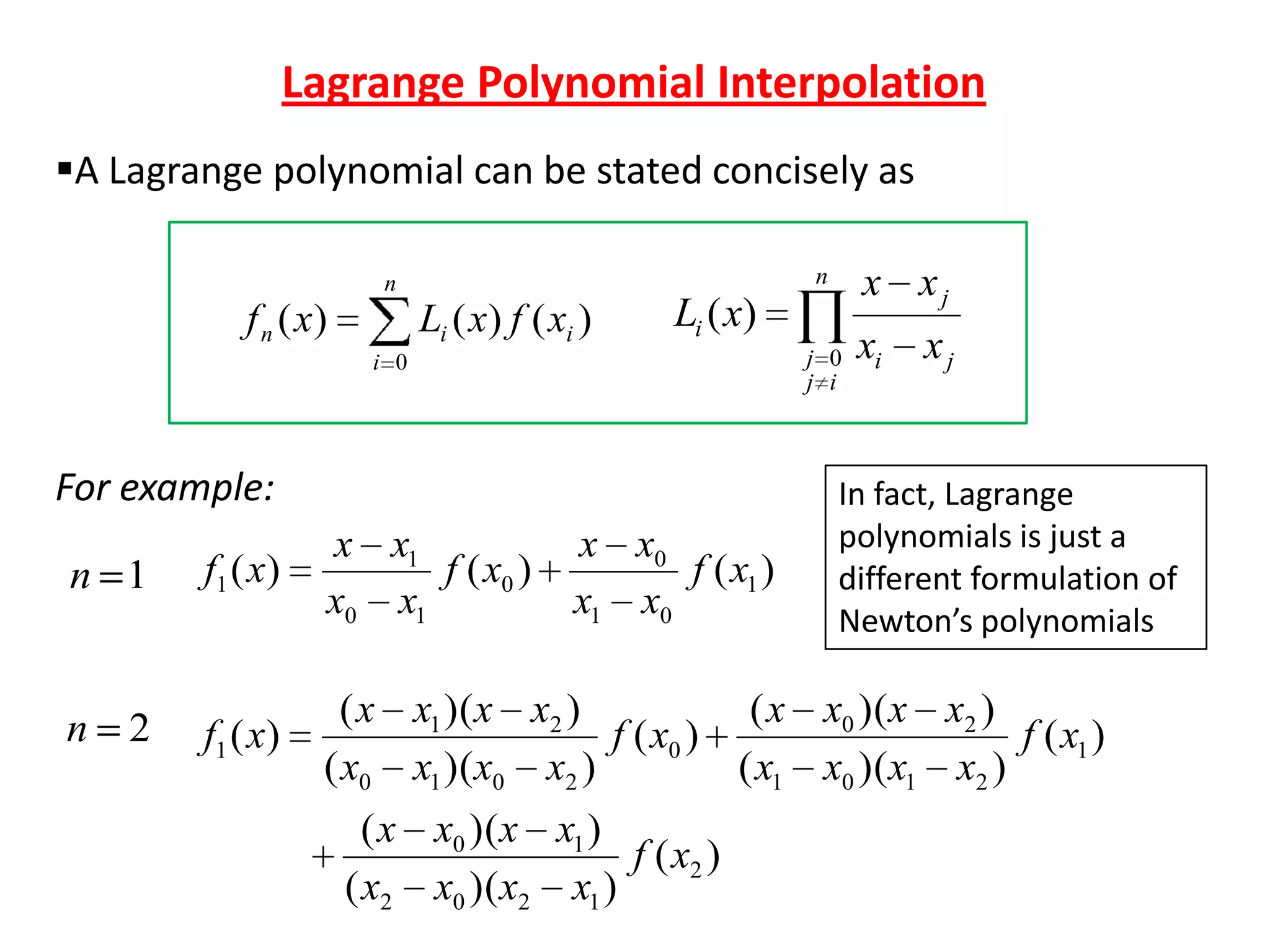
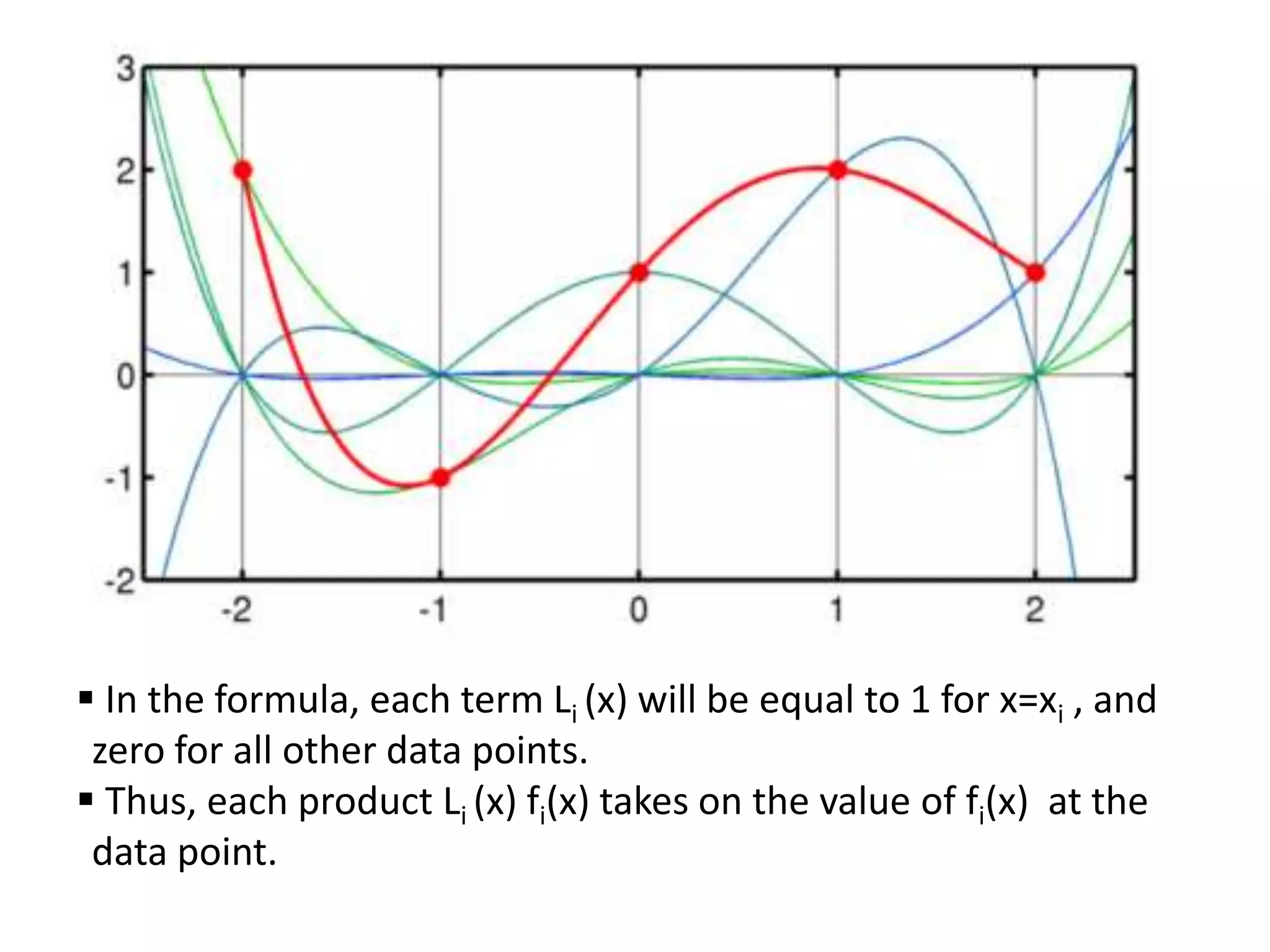
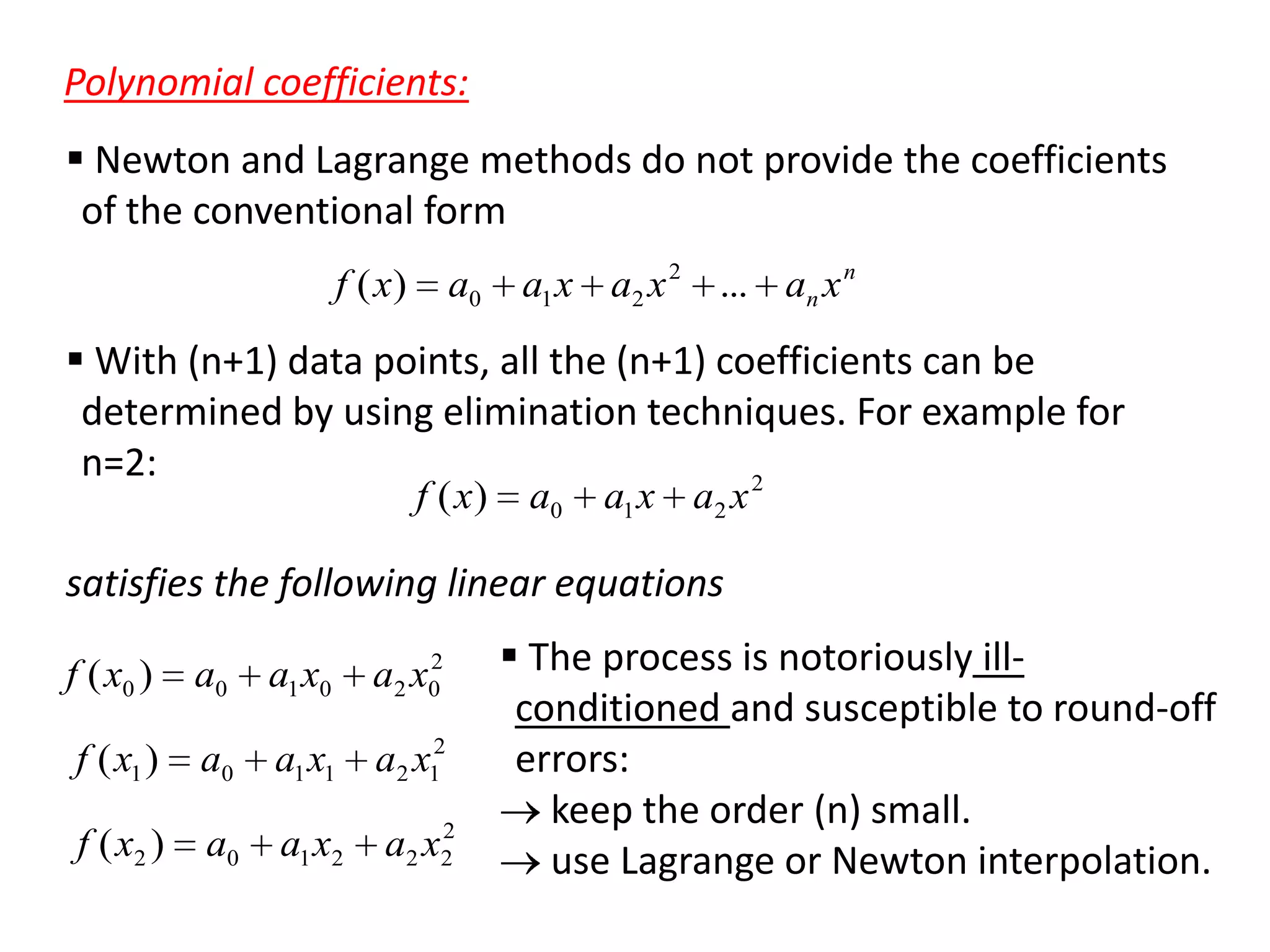
- Newton's divided differences method uses finite differences to determine polynomial coefficients that fit scattered data points. Lagrange polynomials provide an alternative formulation.
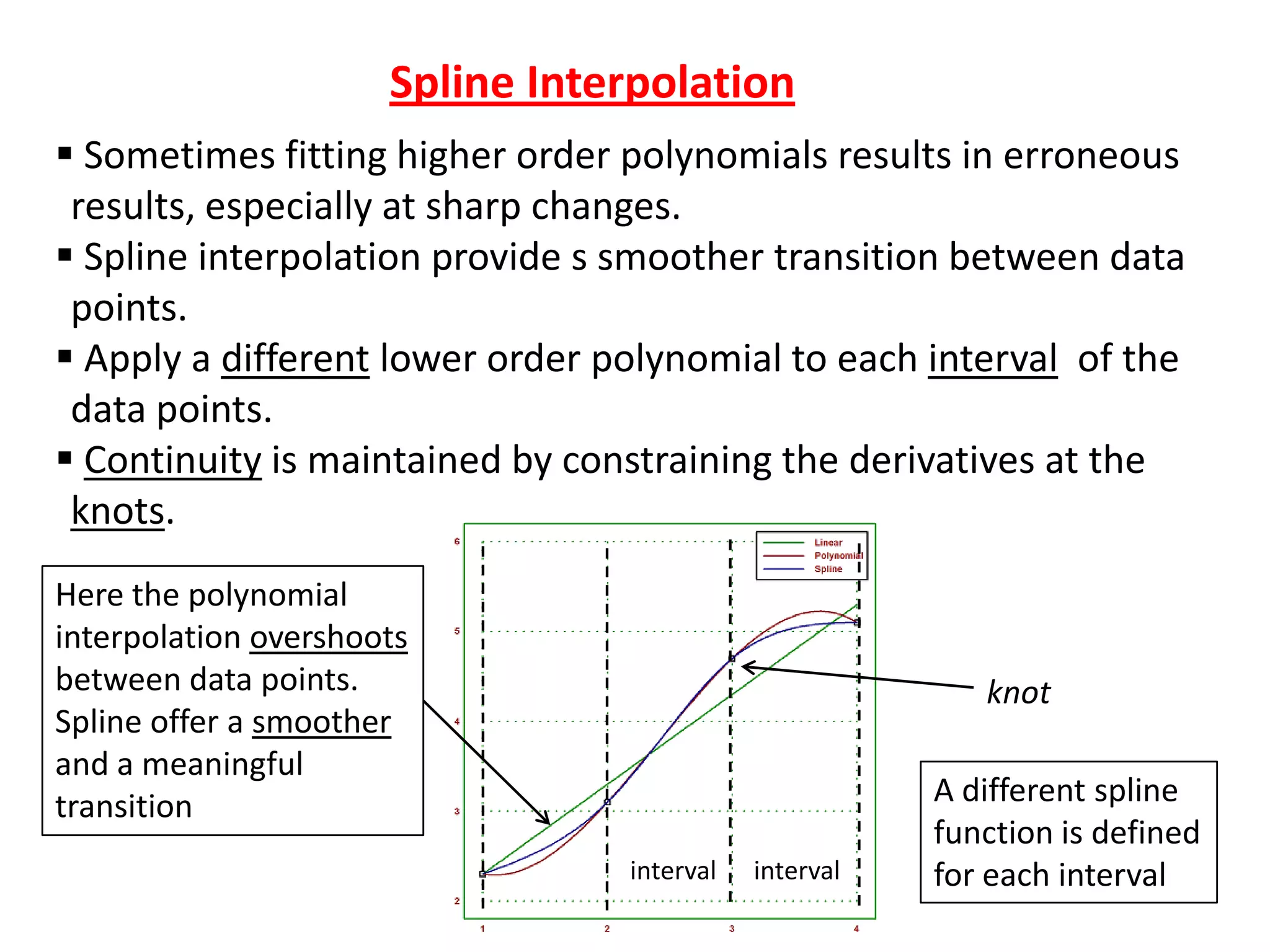
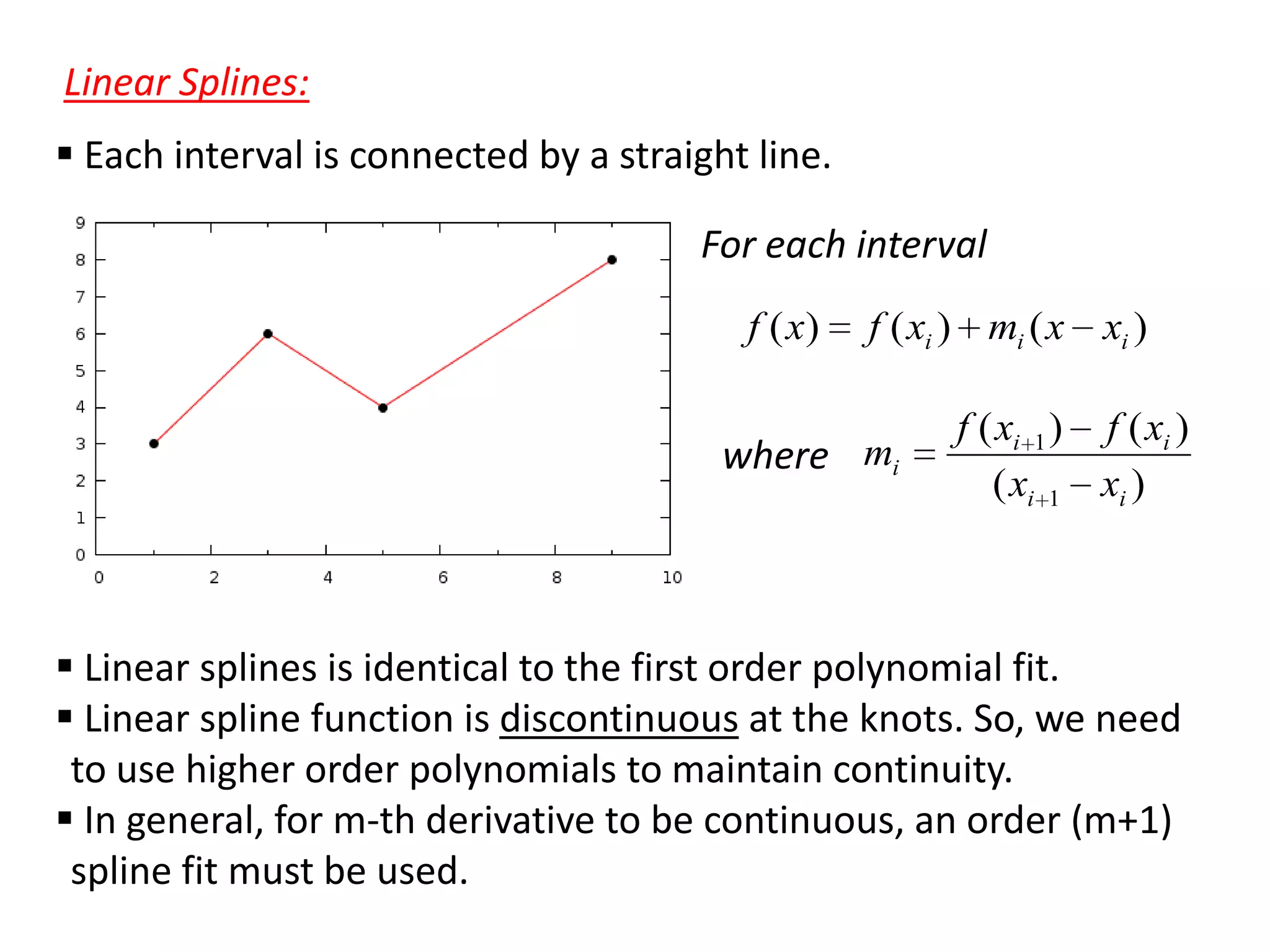
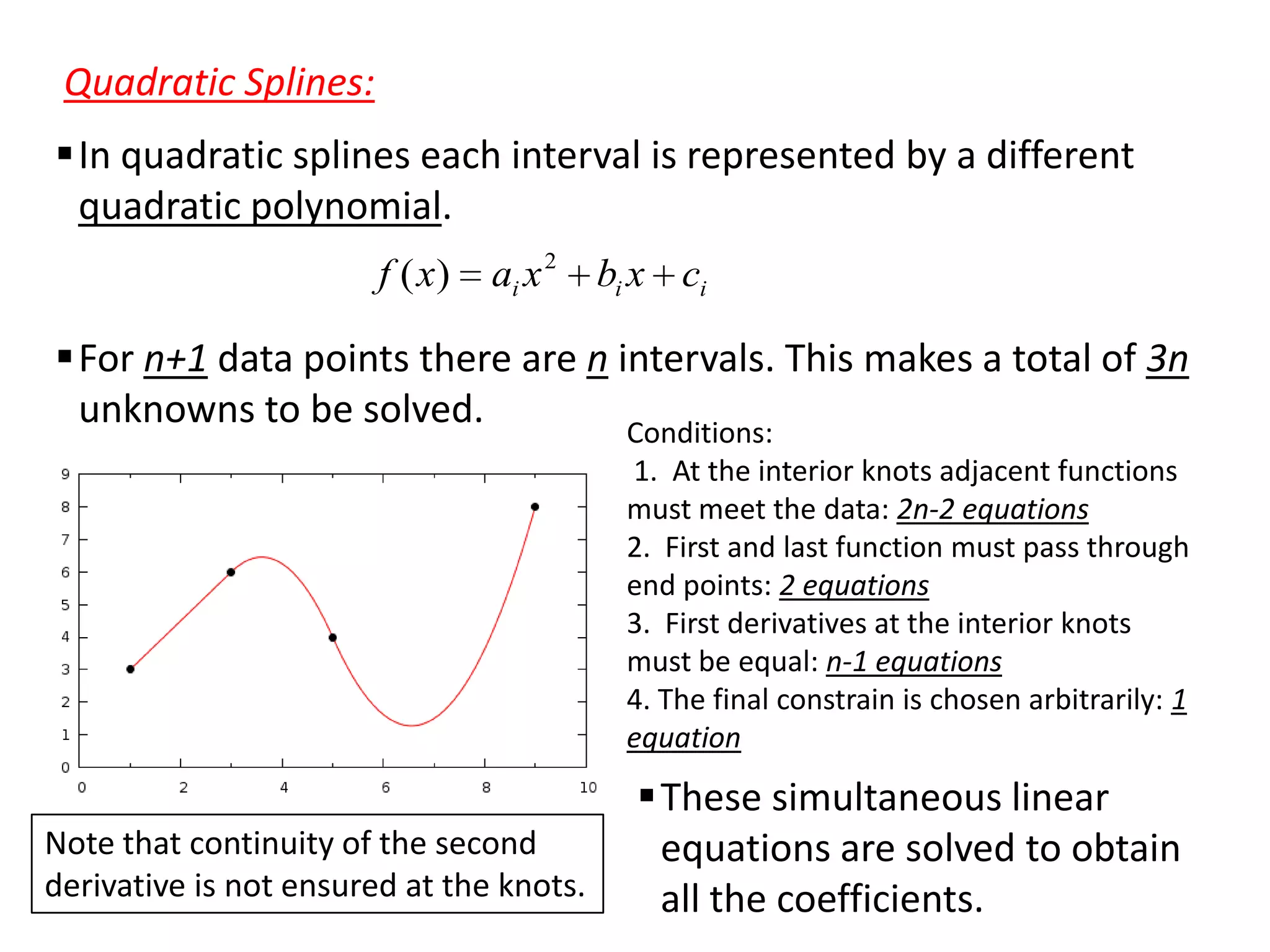
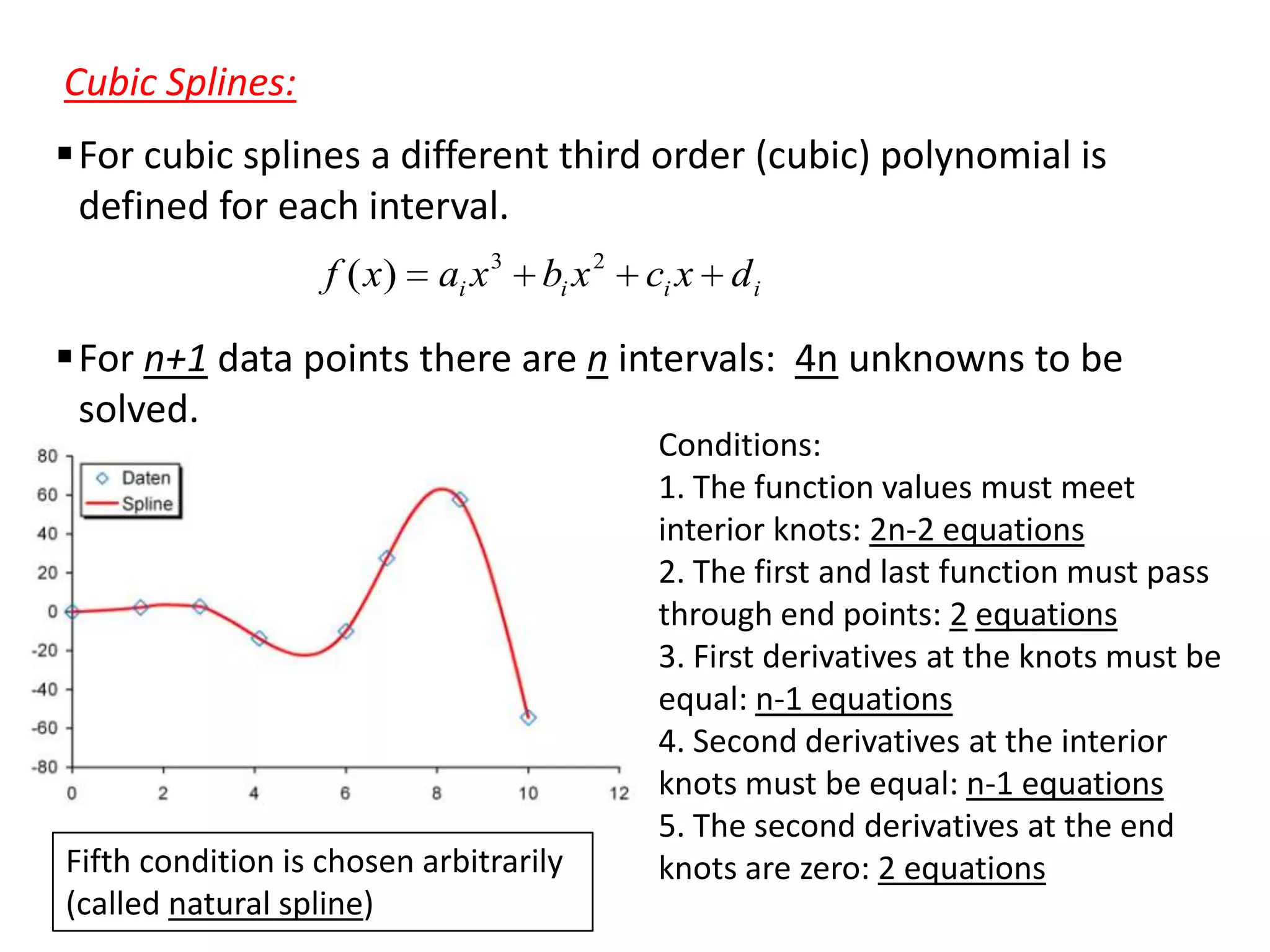
- Spline interpolation smooths transitions by fitting different lower order polynomials to intervals between data points, maintaining continuity of derivatives at knots.
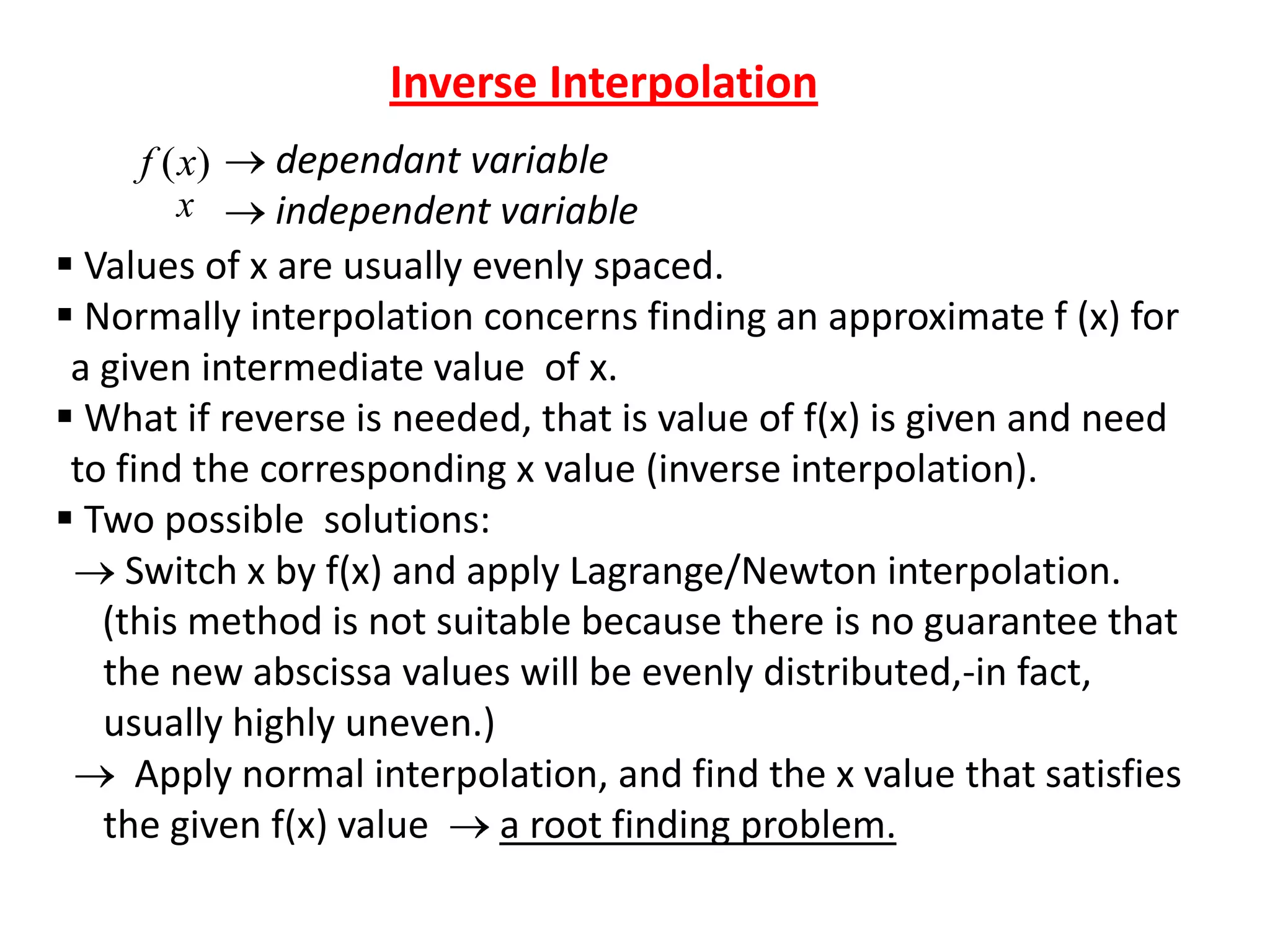
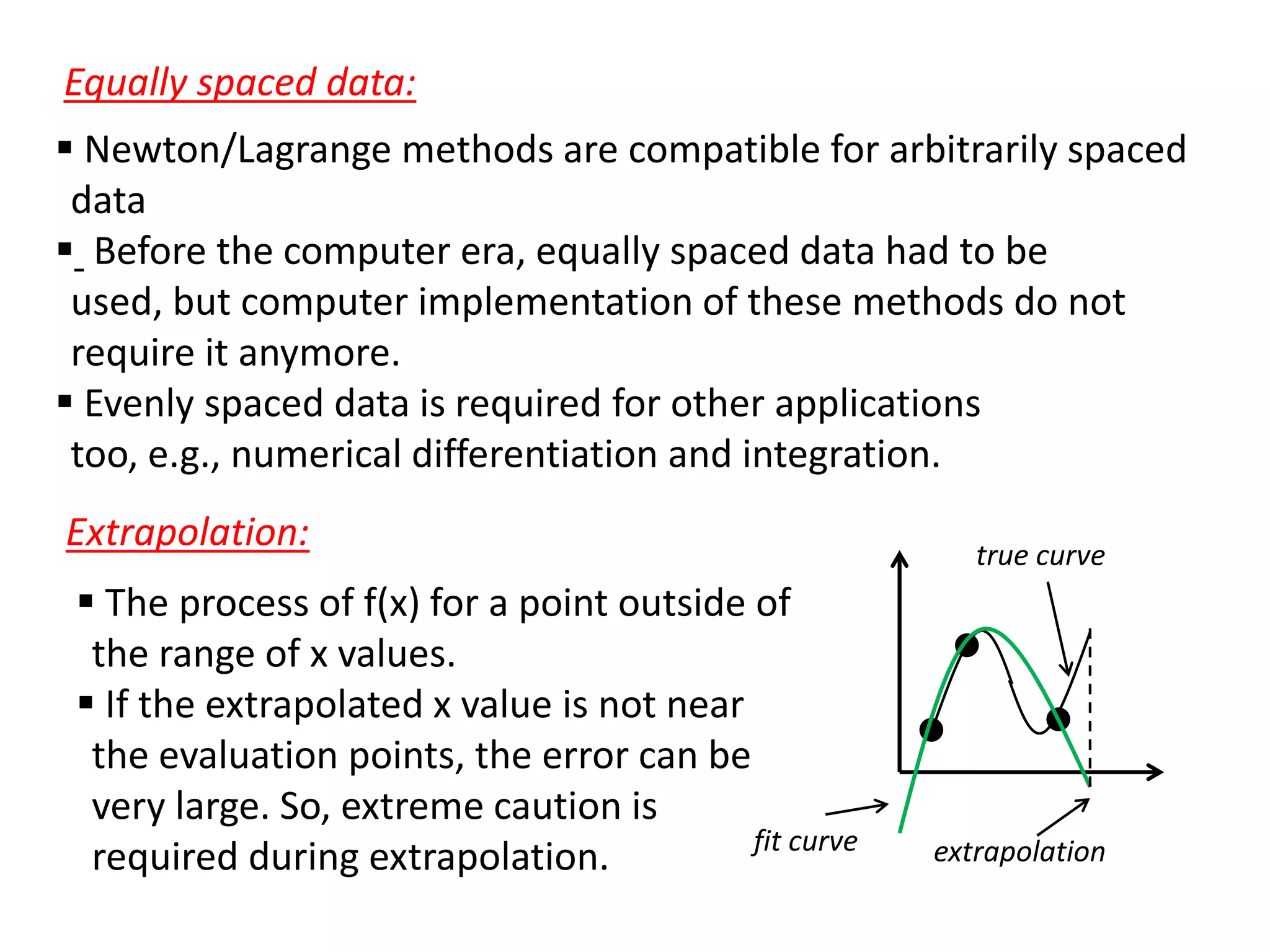
- Inverse interpolation finds the independent variable value corresponding to a given dependent variable value, using normal interpolation and root finding.

![General form of Newton’s interpolating polynomials:
In general, to fit an n-the order Newton’s polynomial to (n+1) data
points:
f n ( x) b0 b1 ( x x0 ) b2 ( x x0 )( x x1 ) .. bn ( x x0 )( x x1 )..( x xn 1 )
where the coefficients:
b0
f [ x0 ]
b1
f [ x1 , x0 ]
b2
f [ x2 , x1 , x0 ]
data points
n-th finite divided difference:
…
bn
brackets represent the
function evaluations for
finite divided-differences
f [ xn , xn 1 ,.., x1 , x0 ]
f [ xn , xn 1 ,.., x1 , x0 ]
f [ xn , xn 1 ,.., x1 ] f [ xn 1 ,.., x1 , x0 ]
( xn x0 )](https://image.slidesharecdn.com/es272ch5b-131213134314-phpapp02/75/Es272-ch5b-5-2048.jpg)
![ These differences can be evaluated for the coefficients and
substituted into the fitting function.
f n ( x)
f ( x0 ) ( x x0 ) f [ x1 , x0 ] ( x x0 )(x x1 ) f [ x2 , x1 , x0 ]
.. ( x x0 )(x x1 )..(x xn 1 ) f [ xn , xn 1 ,.., x0 ]
x values are not need to be equally
spaced.
x values are not necessarily in order.
Newton’s divideddifference interpolating
polynomial](https://image.slidesharecdn.com/es272ch5b-131213134314-phpapp02/75/Es272-ch5b-6-2048.jpg)
( x x1 )..( x xn )
(n+1)th finite
divided difference
One more data point (xn+1) is needed to evaluate the equation.
Rn
f [ xn 1 , xn , xn 1 ,..., x0 ]( x x0 )( x x1 )..( x xn )
This relationship is equivalent to
Rn
f n 1 ( x)
f n 1 ( x)
f n ( x)
f n ( x) Rn
(next estimate) - (current estimate)
increment added to the (n)th order case
to calculate (n+1)th order case is equal to
the error for the n-th order case.](https://image.slidesharecdn.com/es272ch5b-131213134314-phpapp02/75/Es272-ch5b-8-2048.jpg)
( x x1 )..( x xn )
(An additional point (xn+1) is needed for evaluation)
In summary:
Newton’s method is preferable for exploratory computations (n
is not known a priori).
> Newton method has advantages because of the insight for the
behavior between different orders (consider Taylor series).
> Error estimate in Newton method can easily be implemented
as it employs a finite difference.
Lagrange method is preferable when only one interpolation is
performed (order n is known a priori),
> It is easier for computational implementation.](https://image.slidesharecdn.com/es272ch5b-131213134314-phpapp02/75/Es272-ch5b-11-2048.jpg)
















![[123doc.vn] bg-giai-tich-iii-nguyen-xuan-thao-2014](https://cdn.slidesharecdn.com/ss_thumbnails/123doc-150504103727-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)































































![[BDD 2025 - Full-Stack Development] Agentic AI Architecture: Redefining Syste...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-agenticaiarchitectureredefiningsystemcommunication-251124030838-e6c70cc2-thumbnail.jpg?width=640&height=640&fit=bounds)
![[BDD 2025 - Mobile Development] Crafting Immersive UI with E2E and AGSL Shade...](https://cdn.slidesharecdn.com/ss_thumbnails/md-craftingimmersiveuiwithe2eandagslshaderveronicaputrianggraini-251124030840-0c677f44-thumbnail.jpg?width=640&height=640&fit=bounds)

![[BDD 2025 - Artificial Intelligence] Building AI Systems That Users (and Comp...](https://cdn.slidesharecdn.com/ss_thumbnails/ai-buildingaisystemsthatusersandcompanieslove-251124030845-038f7732-thumbnail.jpg?width=640&height=640&fit=bounds)

![[BDD 2025 - Mobile Development] Exploring Apple’s On-Device FoundationModels](https://cdn.slidesharecdn.com/ss_thumbnails/md-exploringappleson-devicefoundationmodels-251124030840-d690542c-thumbnail.jpg?width=640&height=640&fit=bounds)






![[BDD 2025 - Full-Stack Development] PHP in AI Age: The Laravel Way. (Rizqy Hi...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-phpinaiagethelaravelway-251125012602-ef9d330e-thumbnail.jpg?width=640&height=640&fit=bounds)
![[BDD 2025 - Artificial Intelligence] AI for the Underdogs: Innovation for Sma...](https://cdn.slidesharecdn.com/ss_thumbnails/ai-aifortheunderdogsinnovationforsmallbusinesses-251124030839-72a599a4-thumbnail.jpg?width=640&height=640&fit=bounds)
