The document provides an introduction to the finite element method (FEM) for numerical analysis of engineering problems. It discusses how FEM can be used to solve complex problems by dividing them into smaller, simpler elements. FEM allows the use of computers to solve problems that cannot be solved through analytical methods. It also describes the different types of FEM formulations including implicit, which tries to obtain structural equilibrium at each time step for faster solutions, and explicit, which does not require iterations but has longer calculation times. Finally, the document gives examples of how FEM can be applied to problems in solid mechanics, fluid mechanics, and thermodynamics.
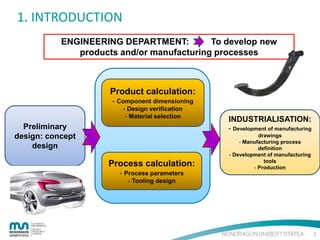
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
- Mechanical field calculation: Motion differential equation
.
..
[M]{δ} + [C]{δ}+[k]{δ} ={Fext}
[M]: Mass matrix
[C]: Damping matrix
[k]: Stiffness matrix
- Mechanical field: STATIC
Acceleration = 0
Velocity = 0
.
..
[M]{δ} + [C]{δ}+[k]{δ} ={Fext}
{δ}: Displacement vector
.
{δ}: Velocity vector
..
{δ}: Acceleration vector
{Fext}: External load vector
[k]{δ} ={Fext}
5 unknowns and 5 equations
15](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-15-320.jpg)
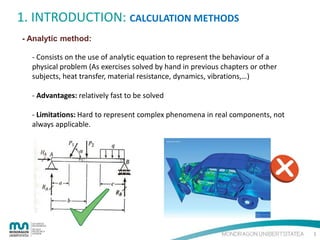
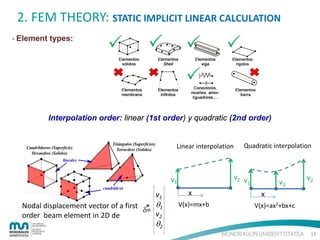
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
- Stress field calculation through nodal displacement.
Strain through local displacement
INTERPOLATION displacement at
any point of the structure
δ1
.
{ δ }e = [ N 1 , N 2 ,...., N n ]
.
δn
Generalised Hooke’s law Stress
calculation through local strain
(1 − ν)
ν
σx
σ
ν
y
σz
E
0
=
τ xy (1 − 2 ⋅ ν) ⋅ (1 + ν)
0
τ yz
τ zx
0
ν
(1 − ν)
ν
ν
0
0
0
0
(1 − 2ν)
2
0
0
ν
(1 − ν)
0
0
0
0
0
0
0
0
0
(1 − 2ν)
2
0
ε
0 x
ε
0 y
ε
0 z
γxy
0 γyz
(1 − 2ν) γzx
2
0
εx
εy
εz
=
γ xy
γ yz
γ zx
∂
∂x
0
0
∂
∂y
0
0
∂
∂y
∂
∂x
0
∂
∂z
∂
∂z
0
0
0
∂
u
∂z
. v
0
w
∂
∂y
∂
∂x
{ ε }= [ ∂ ] { δ }
ε3
ε1
ε2
16](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-16-320.jpg)
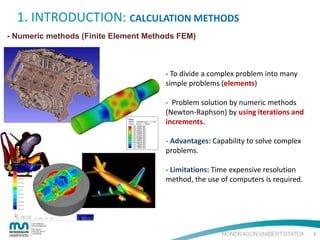
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
- INTERPOLATION FUNCTIONS: Determination of the displacement at any
point of the structure.
{δ }e = displacement vector at any point in a
{δ}e = [N]{δ* }e
determined element
{δ } = nodal displacement vector of a determined
*
e
{δ }e
δ1
= [N1 , N 2 ,..., N n ]
δ n
element
[N ] = interpolation function matrix
[Ni ] = interpolation function of the nodal
displacement a determined node i.
{δ i }
= displacement vector at a determined
node i.
So, the displacement at any point of a determined element is obtained:
{δ } = [N1 ]{δ1}+ [N 2 ]{δ 2 }+ ... + [N n ]{δ n }
Where [Nk] represents the contribution of node k’s displacement in the total displacement of
any determined point.
17](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-17-320.jpg)
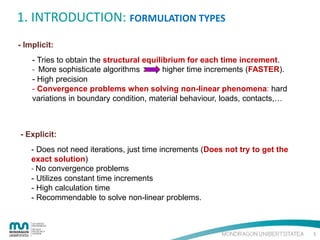
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
- STIFFNESS MATRIX:
{ }
{ }
In order to cause the nodal displacements δ * and consequently deform the element
it is necessary the presence of nodal forces f *
Definition: The stiffness coefficient Kij represents the necessary force to apply to a
certain degree of freedom i to obtain an unitary displacement of the degree of
freedom j being 0 the influence in the displacement of the rest of the degrees of
freedom
n
f i = ∑ K ij ⋅ δ j
j =1
n= number of DOF
K11 ⋅ δ1 + K12 ⋅ δ 2 + ... + K1n ⋅ δ n = f1
K n1 ⋅ δ1 + K n 2 ⋅ δ 2 + ... + K nn ⋅ δ n = f n
{ } = [K ] {δ }
Writing in matrix form: f
*
*
e
e
e
[K]e = Stiffness matrix of the element
18](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-18-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
DETERMINATION OF THE STIFFNESS MATRIX OF A FINITE ELEMENT
Relation between nodal forces an nodal displacements:
{f }= [K ]{δ }
*
*
Based on CAPLEYRON theory, the external work of the nodal forces is represented:
w=
1 *T *
{δ } {f }
2
w=
1 *T
{δ } [K ]{δ * }
2
1
T
σ
The internal deformation energy caused by the nodal displacements: u = ∫ {ε } { }⋅ dv
2
As: {ε } = ∂{δ } = ∂[N ]{ * }= [B]{ * }
1
δ
δ
}T δ *
u = ∫ { [T [D ][ }⋅ dv
δ * B] B]{
2v T
{σ } = [D]{ε } = [D][B]{δ * }
T
{ε }
Being w = u
{ } [K ]{δ }
1 *
δ
2
T
*
{ }
1
= δ*
2
[K ] = ∫ [B ]T [D][B ]⋅ dv
T
{σ }
*
T
∫ [B ] [D ][B ]⋅ dv δ
v
{ }
STIFFNESS MATRIX
v
19](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-19-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
- DETERMINATION OF THE STIFFNESS MATRIX IN GLOBAL COORDINATES
Transformation matrix
a x
[T ] = bx
cx
az
bz
cz
ay
by
cy
From local coordinate
system of the element
To global coordinate system
{δ }= [T ]{δ }
*
{f }= [T ]{f }
{f }= [T ] {f }
*
*
{f }= [K ]{δ }
*
*
T
*
*
{f }= [K ]{δ }
*
*
*
{f }= [T ] {f }= [T ] [K ]{δ }= [T ] [K ][T ]{δ }
*
T
*
T
[K ] = [T ]T [K ][T ]
*
T
*
[K] in GLOBAL coord. system
20](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-20-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
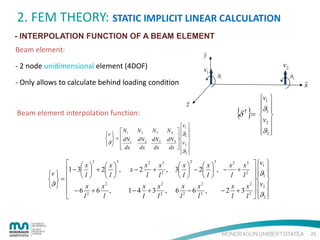
- INTERPOLATION FUNCTION OF A TRUSS ELEMENT
Truss element:
y
- 2 node one-dimensional element (2DOF)
u1
- Only allows to calculate tractive-compressive condition
Nodal displacement vector
{δ }= {u ,u }
T
1
1
i
u (x )
L
u2
2
j
x
x , y , z Local axis
i, j
Element nodes
2
Determination of the interpolation function
u1 , u2 Nodal displacements
2 G.D.L 1st order equation u ( x ) = a0 + a1.x
u (0) = u1
u (l ) = u2
}u = a + a l}
u1 = a0
2
a0 = u1
1
1
a1 = − u1 + u2
l
l
}
0
u1
u = [N1 , N 2 ]
u2
u1 1 0 a0
=
u 2 1 l a1
1
a0 1 l
=
a1 l − 1
0 u1
1 u2
N1 = 1 −
x
l
0
1
− 1 1 u1 = 1 − x , x u1
u = [1, x ]
u2
l l u2
l l
N2 =
x
l
21](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-21-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
- STIFFNESS MATRIX OF A TRUSS ELEMENT
Truss element: 2DOF
y
u1
u2
1
2
L
{δ }
*
x ,y
x
u1
=
u2 x ,y
u x
ux ,y = [N1 N2 ] 1 = 1 −
u2 l
u1 ∂N1 ∂N2 u1 1 1 u1
∂u ∂
,
ε x = = [N1 , N2 ] =
= − ,
u2 ∂x ∂x u2 l l u2
∂x ∂x
[B ]
x
N2 =
l
x
l
Local coordinate system
[B ]
Stiffness matrix obtaining formula:
[k ] = ∫ [B] [D][B].dv
[N ] = [N1 ,N2 ]
N1 = 1 −
x u1
l u2
T
v
1
1
1
−
− 2
l
l 1 1
l2
l dx = E.S 1 − 1
K = ∫ E − , .dv = S.E ∫
.
1
1
1 l l
l − 1 1
v
0 −
2
2
l
l
l
[]
22](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-22-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
- STIFFNESS MATRIX OF A TRUSS ELEMENT
[k ] = EL.S −11
e
− 1
1
Stiffness matrix of TRUSS element
in local coordinate system
- RIGIDITY MATRIX OF A TRUSS ELEMENT IN GLOBAL COORD. SYSTEM
y
y
Displacement vector in global axis:
u1
x
ϑ
x
cosθ
u1
sinθ
v
1
u =
0
2
v2 X ,Y 0
− sinθ
cosθ
0
0
cosθ
0
sinθ
0
0
u1
0 0
− sinθ v1
cosθ 0 x ,y
23](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-23-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
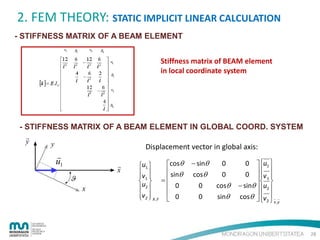
- STIFFNESS MATRIX OF A TRUSS ELEMENT IN GLOBAL COORD. SYSTEM
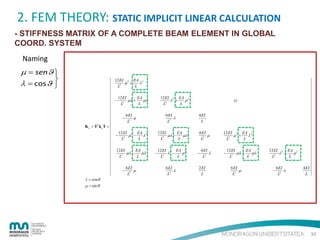
Naming
µ = senϑ
λ = cosϑ
[K ]e = [T ]T [K ] [T ]
λ − µ 0 0 1
E.S µ λ 0 0 0
[K ]e =
l 0 0 λ − µ − 1
0 0 µ λ 0
λ2
λµ
µ2
E.S µλ
[K ]e = 2
l −λ
− λµ
− λµ − µ 2
− λ2
− λµ
λ2
µλ
− λµ
2
−µ
λµ
2
µ
0 − 1 0 λ
0 0 0 − µ
0 1 0 0
0 0 0 0
µ 0
λ 0
0 λ
0 −µ
0
0
µ
λ
Stiffness matrix of a TRUSS
element in GLOBAL coordinate
system
24](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-24-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
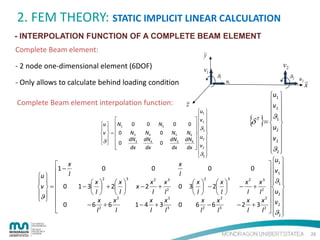
- STIFFNESS MATRIX OF A BEAM ELEMENT
BEAM element: 4 DOF
dv
dθ
d 2v
εx = −y
= − y 2 being θ =
dx
dx
dx
Beam deflection
( { })
{ }
d 2v
d2
ε x = − y 2 = − y 2 [N ] δ * = [B ] δ *
dx
dx
{δ }
*
x, y
v1
θ
= 1
v
2
θ 2 x , y
[N ] = [N1 , N2 , N3 , N4 ]
Local coordinate system
[B] = − y − 62 + 12 x3 , − 4 + 6 x2 ,
l
l
l
l
6
x
2
x
− 12 3 , − + 6 2
l2
l
l
l
[k ] = ∫ [B]T [D][B]dv =
v
x
6
− l 2 + 12 l 3
− 4 + 6 x
l
l
x 4
x 6
x 2
x
l 2 6
2
= E∫
− 2 + 12 3 , − + 6 2 , 2 − 12 3 ,− + 6 2 dx ∫ y ds
6
x
l
l
l
l l
l
l
l s
0
− 12 3
l 2
l
2
x
− + 6 2
l
l
27](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-27-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
- STIFFNESS MATRIX OF A BEAM ELEMENT IN GLOBAL COORD. SYSTEM
Naming
µ = senϑ
λ = cosϑ
λ
− µ
0
[k ]e = E.Iz
0
0
0
12 2
l3 µ
− 12 λ
l3
− 6 µ
2
[k ]e = E.I z l
− 12
3 µ2
l
12
3 λµ
l
− 6
l3 µ
12 2
λ
l3
6
λ
l2
12
λµ
l3
− 12 2
λ
l3
6
l2
µ 0 0 0
λ 0 0 0
0
0
0
0
1 0
0λ
0− µ
0 0
0
µ
λ
0
0
0 0
0
0
0
0 0
0
0
1
0
4
l
6
12 2
µ
µ
2
l
l3
−6
− 12
λ
λµ
2
l
l3
2
−6
µ
l
l
0
12
l3
6
l2
0
− 12
l3
6
l2
12 2
λ
l3
−6
µ
l2
0 0 0
− 12
6
0 3
2
l
l
−6
4
0
l2
l
0 0 0
−6
12
0 3
l2
l
−6
2
0 2
l
l
4
l
0
6
l2
2
l
0
−6
l2
4
l
λ −µ 0 0 0 0
µ λ 0 0 0 0
0
0
0
0
0
0
0
0
1
0
0
0
0 0 0
λ − µ 0
µ λ 0
0 0 1
Stiffness matrix of a BEAM
element in GLOBAL coordinate
system
29](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-29-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
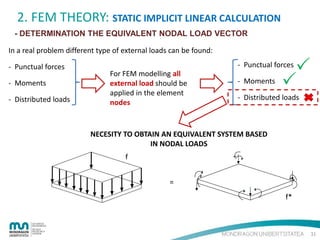
- DETERMINATION THE EQUIVALENT NODAL LOAD VECTOR
The external work due to all the external load applied to the system is given by
1
T
w1 = ∫ {δ } { f }⋅ ds
2s
By using the interpolation functions:
w1 =
{ } [N ] { f }⋅ ds = 1 {δ } ∫ [N ] { f }⋅ ds
2
1
δ*
2∫
s
T
* T
T
T
s
Thus the work of the equivalent system can be written as:
w2 =
w1 = w2
{ } {f }
1 *
δ
2
T
*
{ } ∫ [N ] { f }⋅ ds = 1 {δ } {f }
2
1 *
δ
2
T
* T
T
*
s
{f }= ∫ [N ] { f }⋅ ds
T
*
s
32](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-32-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
DETERMINATION OF THE STRESS/STRAIN CONDITION:
Once, the nodal displacement vector of the studied system is solved the stress/strain
condition at any point can be obtained.
STEP 1: STRAIN DETERMINATION AT A CERTAIN POINT
δ1
.
{ δ }e = [ N 1 , N 2 ,...., N n ]
.
δn
Determination of
the elongation at
the selected point
{ε } = [∂ ]{δ }
{ε } = ∂[N ]{δ * }= [B]{δ * }
εx
ε
y
εz
=
γ xy
γ yz
γ zx
∂
∂x
0
0
∂
∂y
0
∂
∂z
0
∂
∂y
0
∂
∂
∂x
∂z
0
0
0
∂ u
∂ z
v
0
w
∂
∂y
∂
∂x
Strain vector determination
33](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-33-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
DETERMINATION OF THE STRESS/STRAIN CONDITION:
STEP 2: STRESS DETERMINATION AT A CERTAIN POINT
The relation between the strain and the stress in the linear elastic domain is given by
the generalised Hooke’s law:
[
]
[
]
[
]
1
σ x − υ (σ y + σ z )
E
1
ε y = σ y − υ (σ z + σ x )
E
1
ε z = σ z − υ (σ x + σ y )
E
εx =
2(1 + υ )
τ xy
G
E
τ
2(1 + υ )
τ yz
γ yz = yz =
G
E
τ
2(1 + υ )
γ zx = zx =
τ zx
G
E
γ xy =
τ xy
=
Generalized Hooke’s law
LAMÉ ' s _ law : G =
E
For isotropic materials
2(1 + υ )
34](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-34-320.jpg)
![2. FEM THEORY: STATIC IMPLICIT LINEAR CALCULATION
DETERMINATION OF THE STRESS/STRAIN CONDITION:
STEP 2: STRESS DETERMINATION AT A CERTAIN POINT
The relation between the strain and the stress in the linear elastic domain is given by
the generalized Hooke’s law:
0
0
0
υ
(1 − υ ) υ
υ (1 − υ ) υ
0
0
0 ε
x
σ x
υ
σ
0
0 ε
υ (1 − υ ) 0
y
y
1 − 2υ
0
σ z
0
0
0 ε z
E
0
=
2
τ xy (1 − 2υ )(1 + υ )
γ xy
1 − 2υ
0
τ yz
0
0
0
0 γ yz
2
γ
τ zx
1 − 2υ zx
0
0
0
0
0
2
{σ } = [D]{ε }
35](https://image.slidesharecdn.com/cursofem3-131023093149-phpapp02/85/Introduction-to-FEM-35-320.jpg)