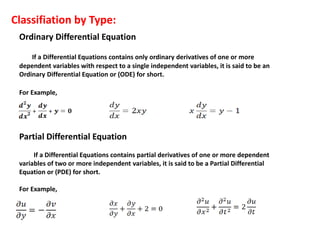
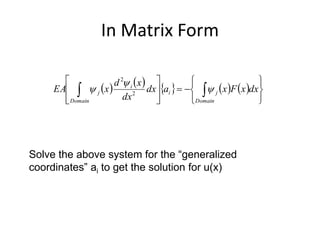
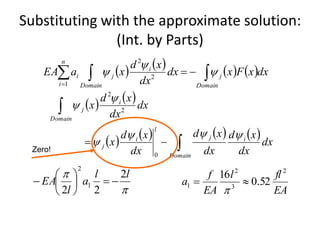
This document provides an overview of the finite element method (FEM) for a course on engineering geology. It outlines the course content, which includes an introduction to FEM, the Ritz-Galerkin and weak form methods, and applying FEM to 1D and 2D problems. Key aspects of FEM discussed include reducing partial differential equations to a system of algebraic equations, dividing problems into finite elements, and constructing approximate functions and element matrices. The origins and importance of FEM for solving complex problems are also summarized.

























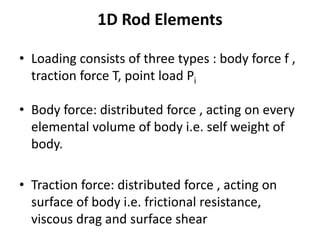
![1D Rod Elements
• Element strain energy
• Element stiffness matrix
• Load vectors
– Element body load vector
– Element traction-force vector
qkqU eT
e
][
2
1
11
11
][
e
eee
l
AE
k
1
1
2
flA
f eee
1
1
2
ee Tl
T
Element -1 Element-2](https://image.slidesharecdn.com/fem1-170523173325/85/Fem-1-33-320.jpg)























































































![Human Reproduction [ Reproductive System ] Notes @irfanullah_mehar Irfanullah...](https://cdn.slidesharecdn.com/ss_thumbnails/humanreproductionreproductivesystemnotesirfanullahmeharirfanullahmeharjanantantra-260111172350-56e85778-thumbnail.jpg?width=640&height=640&fit=bounds)


