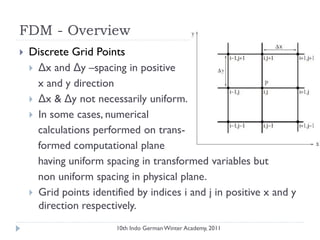
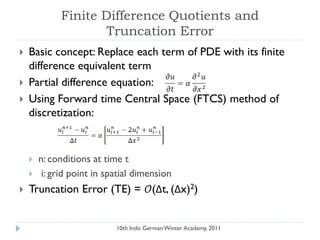
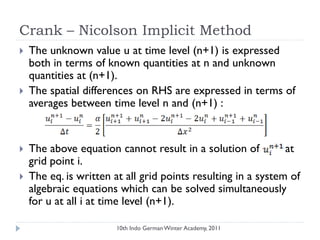
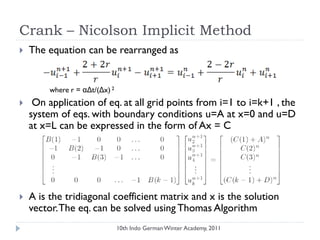
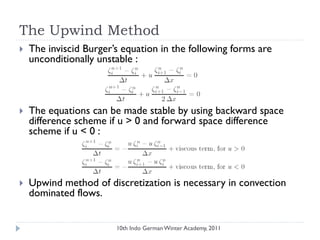
This document provides an overview of finite difference methods for solving partial differential equations. It introduces partial differential equations and various discretization methods including finite difference methods. It covers the basics of finite difference methods including Taylor series expansions, finite difference quotients, truncation error, explicit and implicit methods like the Crank-Nicolson method. It also discusses consistency, stability, and convergence of finite difference schemes. Finally, it applies these concepts to fluid flow equations and discusses conservative and transportive properties of finite difference formulations.



































































![Polymer [ बहुलक ] Chemistry Notes PDF - Irfanullah Mehar - JJ Sir Chemistry.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/polymerchemistrynotespdf-irfanullahmehar-jjsirchemistry-260210172118-3f9b37f7-thumbnail.jpg?width=640&height=640&fit=bounds)

