Downloaded 49 times

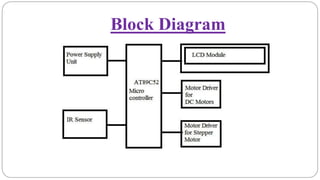
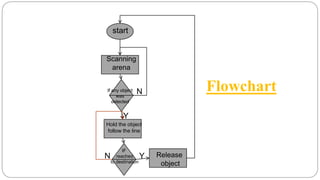
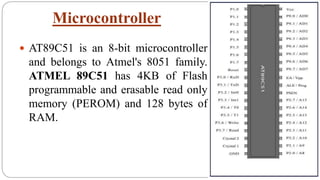
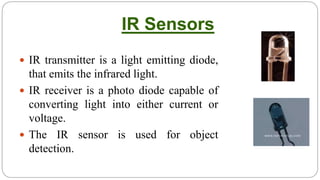
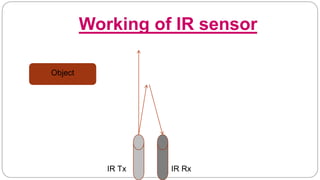
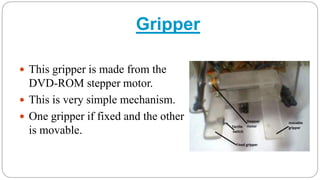
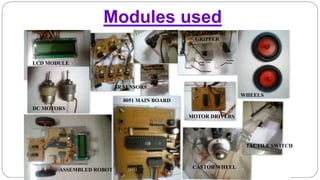

This document describes the design and components of an autonomous pick and place robot. The robot uses IR sensors to scan an area and detect objects, a gripper module to pick up objects, and follows a line using DC motors until reaching a destination where it places the object. The robot is controlled by an AT89C51 microcontroller and other components include an LCD display, motor drivers, batteries, and sensors. Its applications include areas where human involvement is not required and it has potential for future improvements like adding color sensors for increased object detection accuracy.