Downloaded 2,012 times

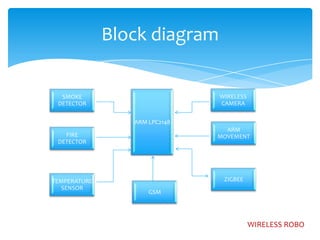
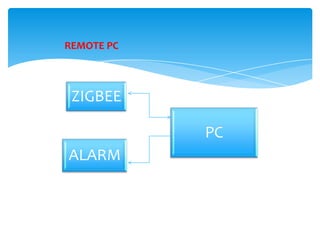

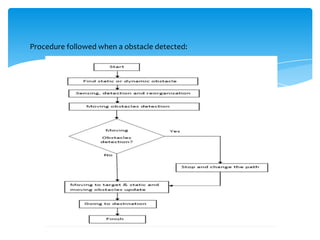


This document describes a proposed wireless AI-based industrial security robot project. The objectives are to build a wireless robot for industrial applications with live audio and video streaming to monitor areas that are difficult for people to access safely. The proposed system uses various sensors like fire, smoke, intruder, humidity and temperature sensors along with a wireless camera and Zigbee transmission to an ARM processor-controlled robot. If any abnormalities are detected, an alarm is sent to a remote PC and mobile phone via GSM. The robot is expected to move autonomously and avoid obstacles while transmitting real-time video and alerts. This intelligent robot could help improve safety and efficiency in hazardous industrial environments.












































































