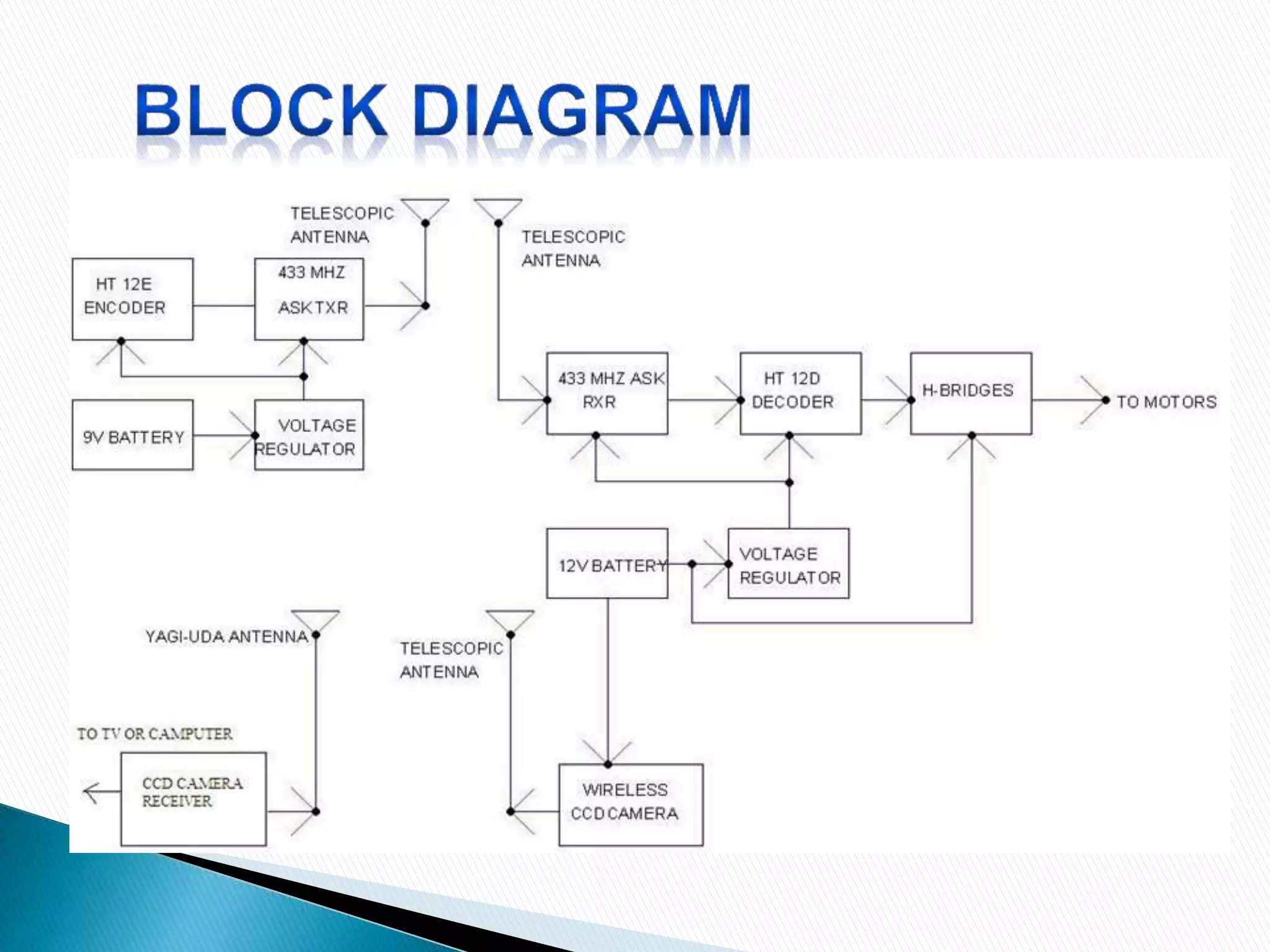
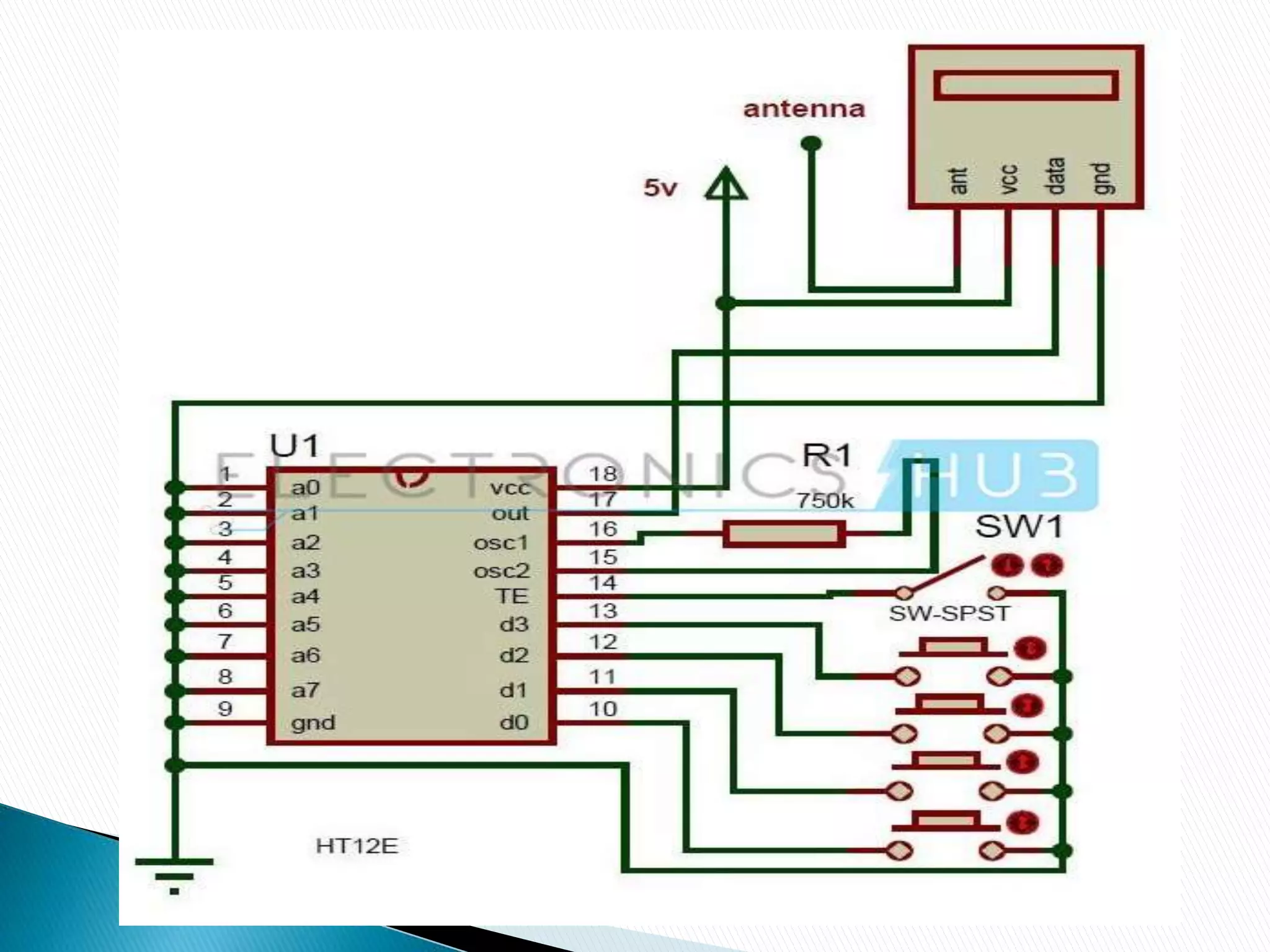
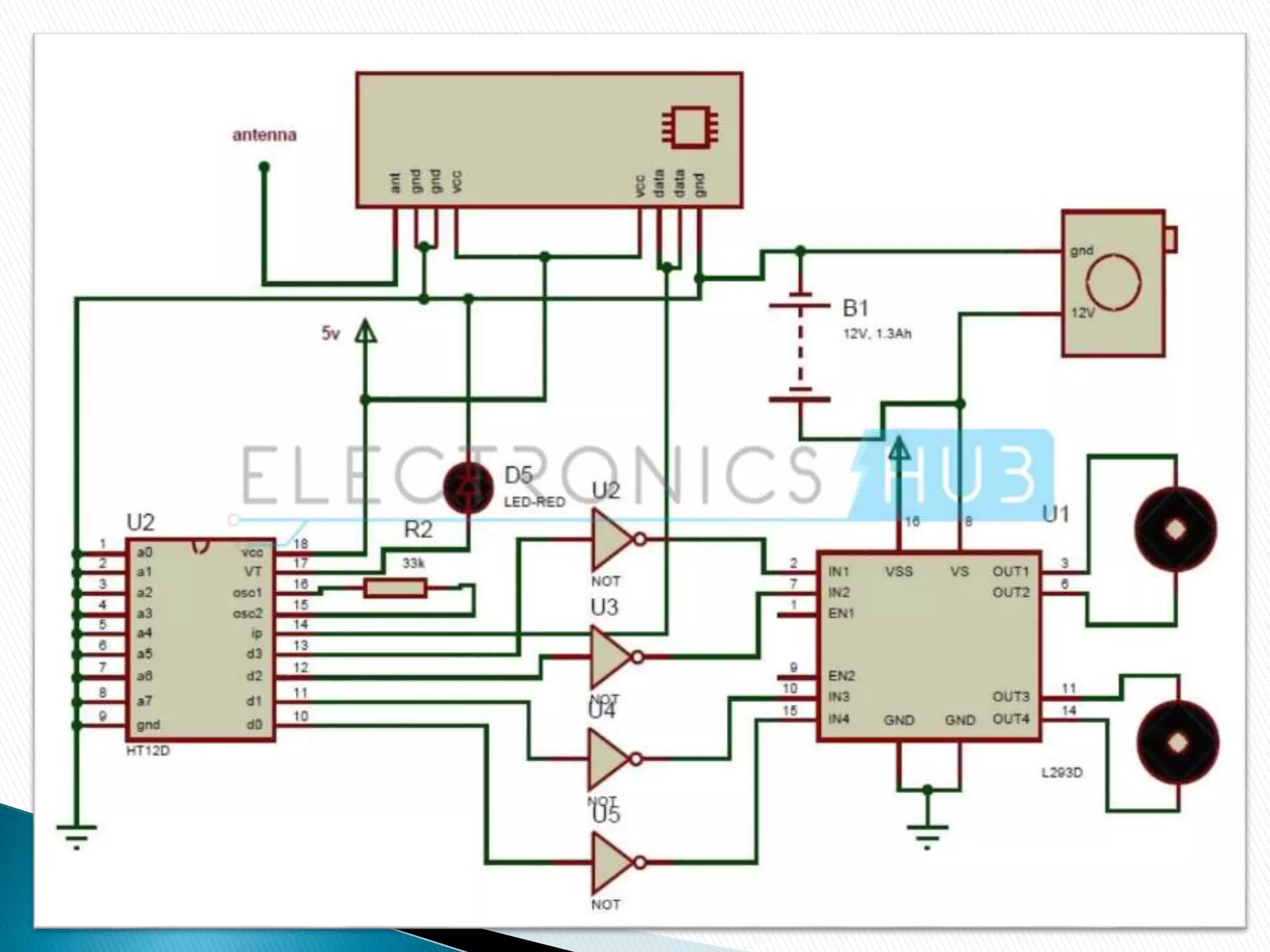
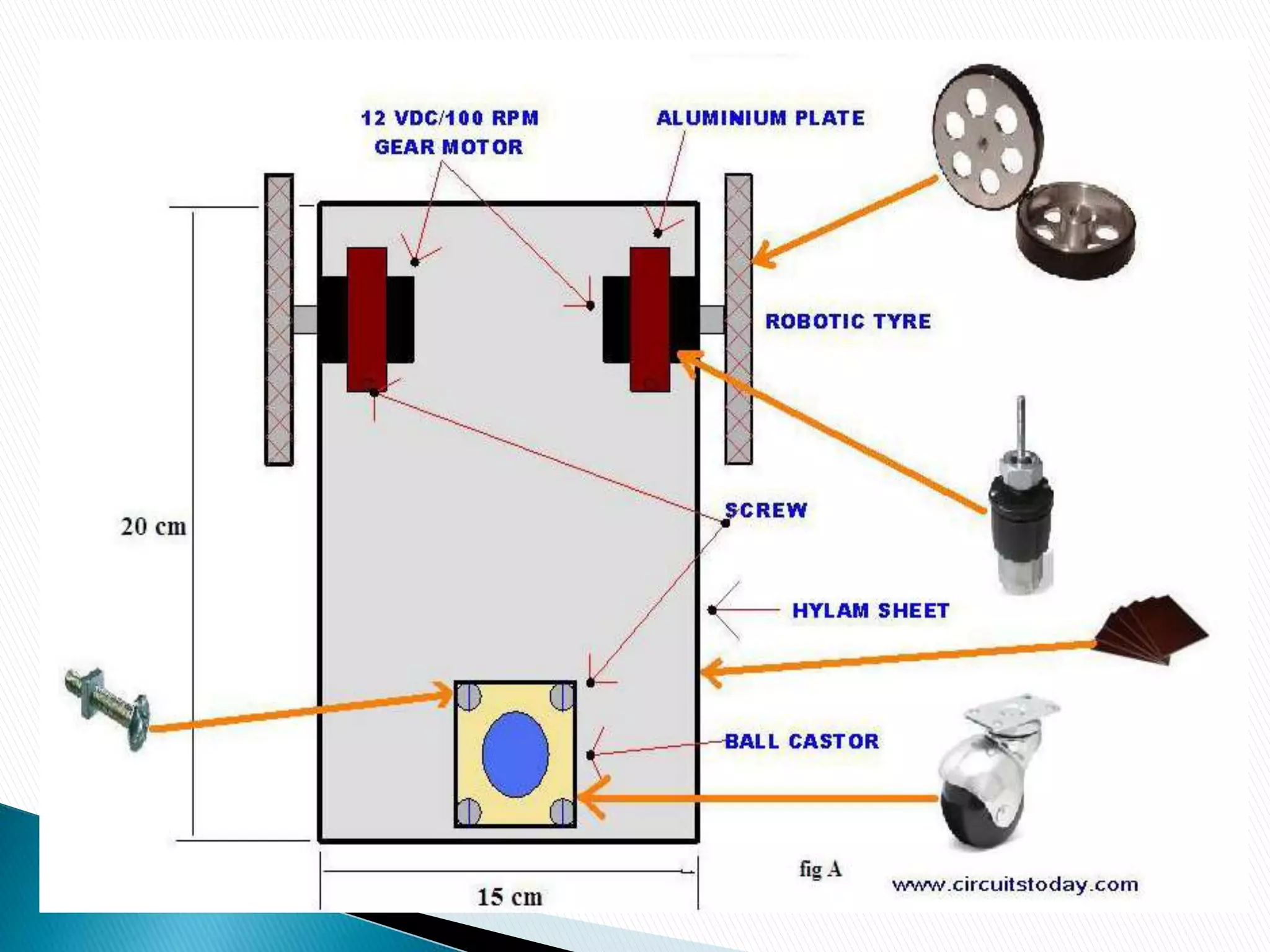
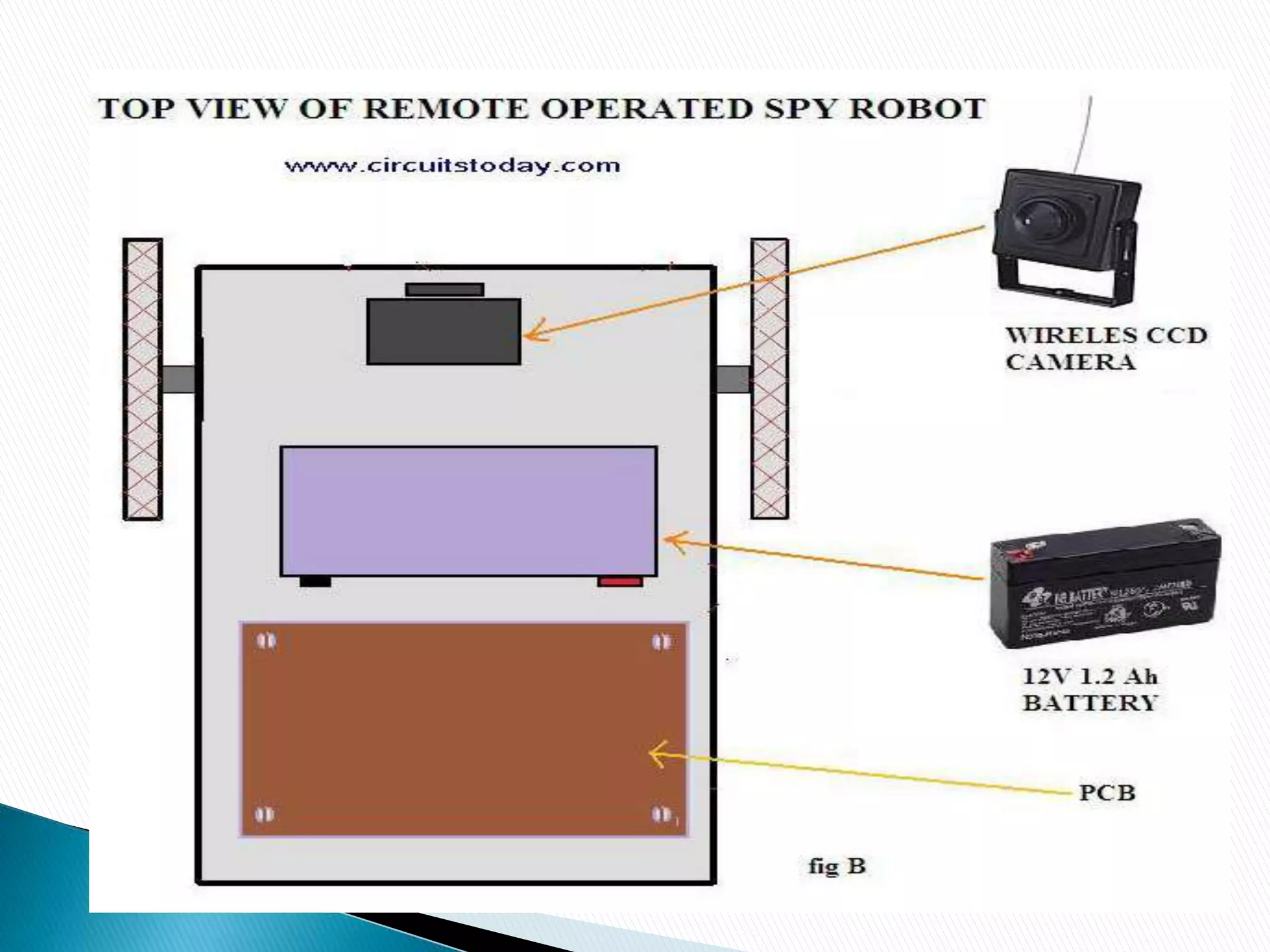
This document describes the design and operation of a remote-controlled spy robot. It can be controlled wirelessly using an RF transmitter up to 125 meters away and captures audio and video using a wireless camera, transmitting the data to a remote receiver. The robot uses an HT12E encoder and HT12D decoder to control motors via an L293D driver. It is powered by a 12V battery and designed on a hylam sheet with wheels to be used for surveillance in dangerous areas where humans cannot access.