Line follower robot
•Download as DOCX, PDF•
1 like•1,418 views

This robot follows a black line on a bright surface or white line on a dark surface using IR sensors to detect the line. It uses a microcontroller, IR sensors, motor driver, and DC motors to sense the line and drive the wheels to stay on the line. When the sensors detect the line on one side, the microcontroller stops that side's motor to turn the robot.

Recommended
More Related Content
What's hot
What's hot (20)
Similar to Line follower robot
Similar to Line follower robot (20)
More from UVSofts Technologies
More from UVSofts Technologies (12)
Recently uploaded
Recently uploaded (20)
Line follower robot
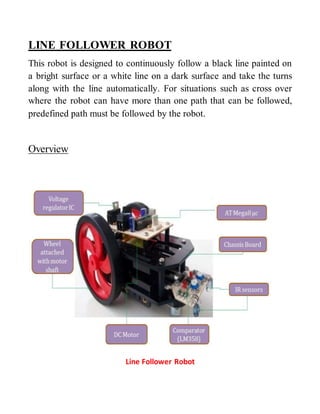
- 1. LINE FOLLOWER ROBOT This robot is designed to continuously follow a black line painted on a bright surface or a white line on a dark surface and take the turns along with the line automatically. For situations such as cross over where the robot can have more than one path that can be followed, predefined path must be followed by the robot. Overview Line Follower Robot
- 2. Hardware components required and their purpose 1. A microcontroller (ATMega8) 2. IR Sensor 3. Comparator 4. DC motor 5. Motor driver IC (L293D) 6. Wheels 7. Power adopter Microcontroller (ATMega8): This is the brain of this robot in which the program is loaded to do the required functioning and is interfaced with sensors and the motor driver to make the system work as required. IR sensor: This senses whether there is platform in front of the robot or an edge is arrived and sends the appropriate signal to the comparator. Comparator: This gets input from the sensor, compare it with predefined voltage and send logic 1 to microcontroller if there is detected a still platform and logic 0 if edge of platform is there.
- 3. IR Sensor Circuit DC Motor: This motor is controlled with DC voltages and can move in forward and backward direction according to the polarity of the voltage applied. Motor driver IC (L293D): Microcontrollers can’t supply the current required by DC motor to run. So, to fulfill this requirement these motor driver ICs are used.
- 4. DC motors with Driver IC Power adopter: This is used to give appropriate dc power supply to microcontroller, driver IC sensors and the other passive components of the robot. Wheels: In it three wheels are employed, two at rear end and one at front end. Rear wheels are attached with the motors and also control the steering of robot. Front wheel is the loose steered wheel which moves in the direction of the pressure applied to it.
- 5. Block diagram Block Diagram: Line Follower Description To make the robot follow the black line, IR sensors are employed with the fact that black surface absorbs light and white surface reflects light. The sensors are mounted on left front end and right front end of the robot keeping the black line lies in between them. Until sensors are getting the reflected light, the comparator sends logic 1 to the microcontroller and the microcontroller in turn switches ON the
- 6. motor associated with the sensor and when any of the sensors comes up on the black line the microcontroller stops the motor associated with that sensors and make the robot to turn in the direction of the black line. When the robot reaches end point and both the sensors are getting black surface, robot stops. Programming I/O port of ATMega8: Each port has three i/o registers associated with it which are designated as DDRx, PORTx, PINx. Port Registers in ATMega8
- 7. DDRx register: It stands for data direction register. This register is of 8 bits. Value of this register decides whether the port will act as input port or as output port. To make any port as input port, the contents of the associated DDRx register are made 0x00 and to make any port as output port, the contents of the associated DDRx register are made 0xff. PORTx register: This register is responsible for outputting any data to the port. Data to be outputted to any port is loaded to the corresponding PORTx register after making the direction of that port as output. For example: To send 0x14 to PORTA:- DDRA=0xFF; PORTA=0x14; PINx register: This register is responsible for inputting data from any port. Data to be inputted from any port is taken from the corresponding PINx register after making the direction of that port as input. For example: To get data from PORTB:- DDRA=0x00; var=PINB; //’var’ is a character type variable