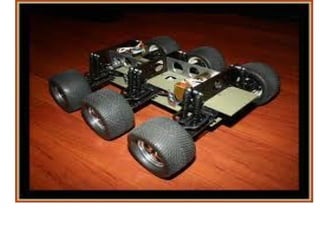
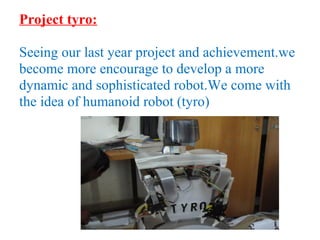
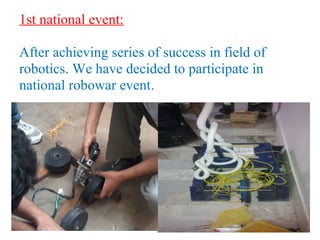
The Tyro team consists of 12 members experienced in robotics, currently working on projects like humanoid robots and all-terrain vehicles. They have achieved multiple awards at national events and have developed various robotic models, including line followers and mobile-controlled robots. Their latest project aims to create a humanoid robot with capabilities for movement and load-bearing, designed for participation in national robowar events.