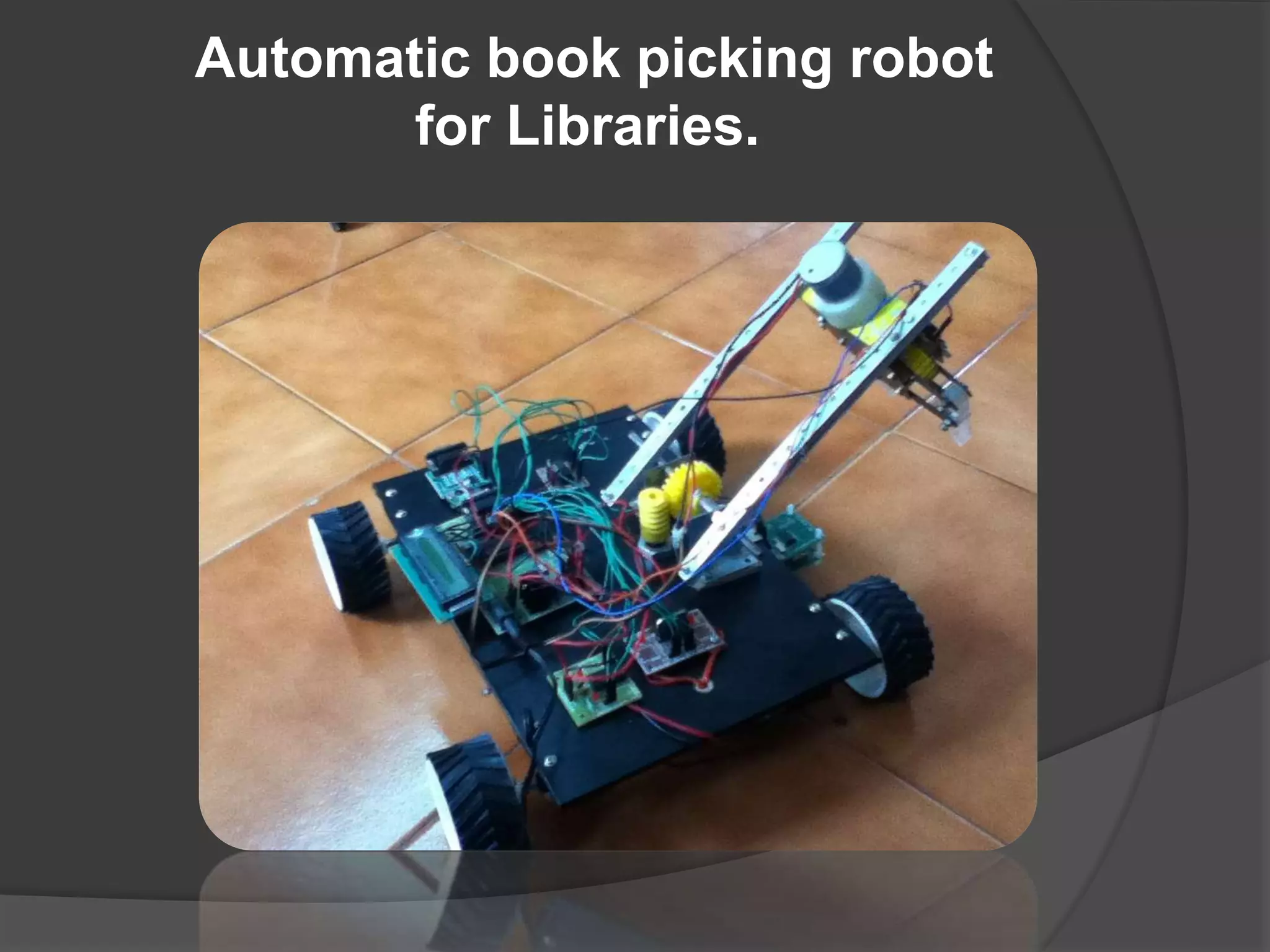
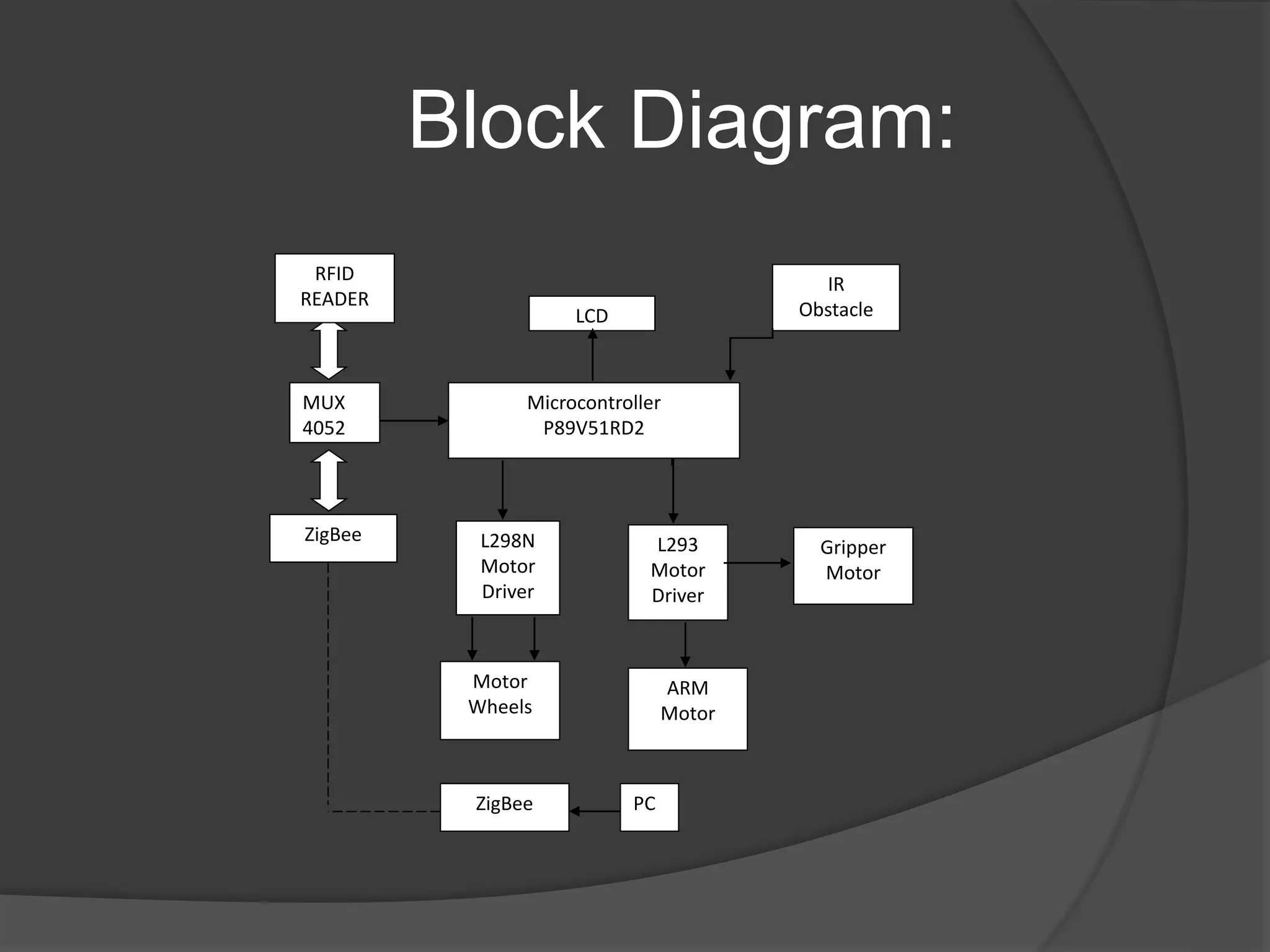
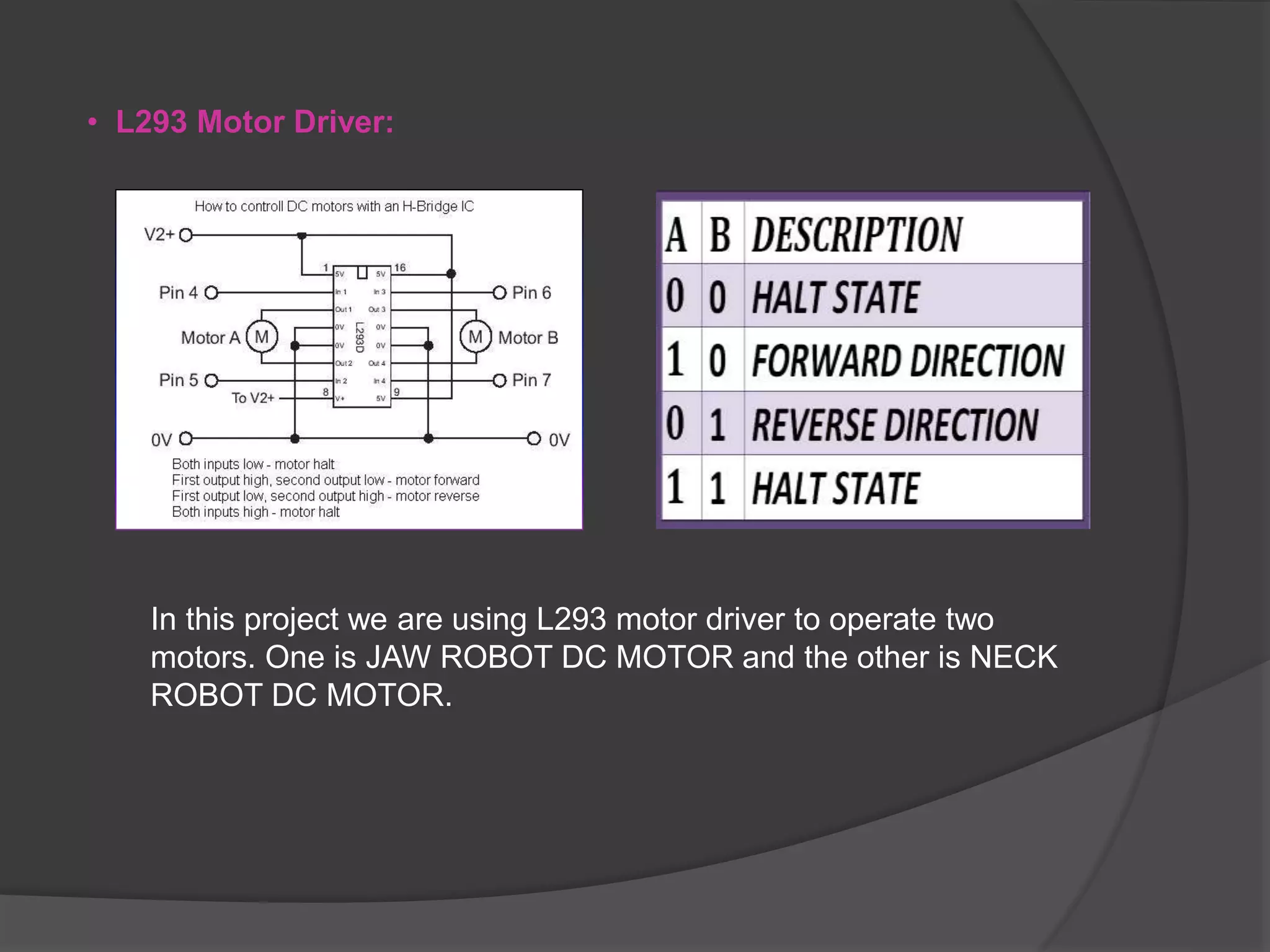
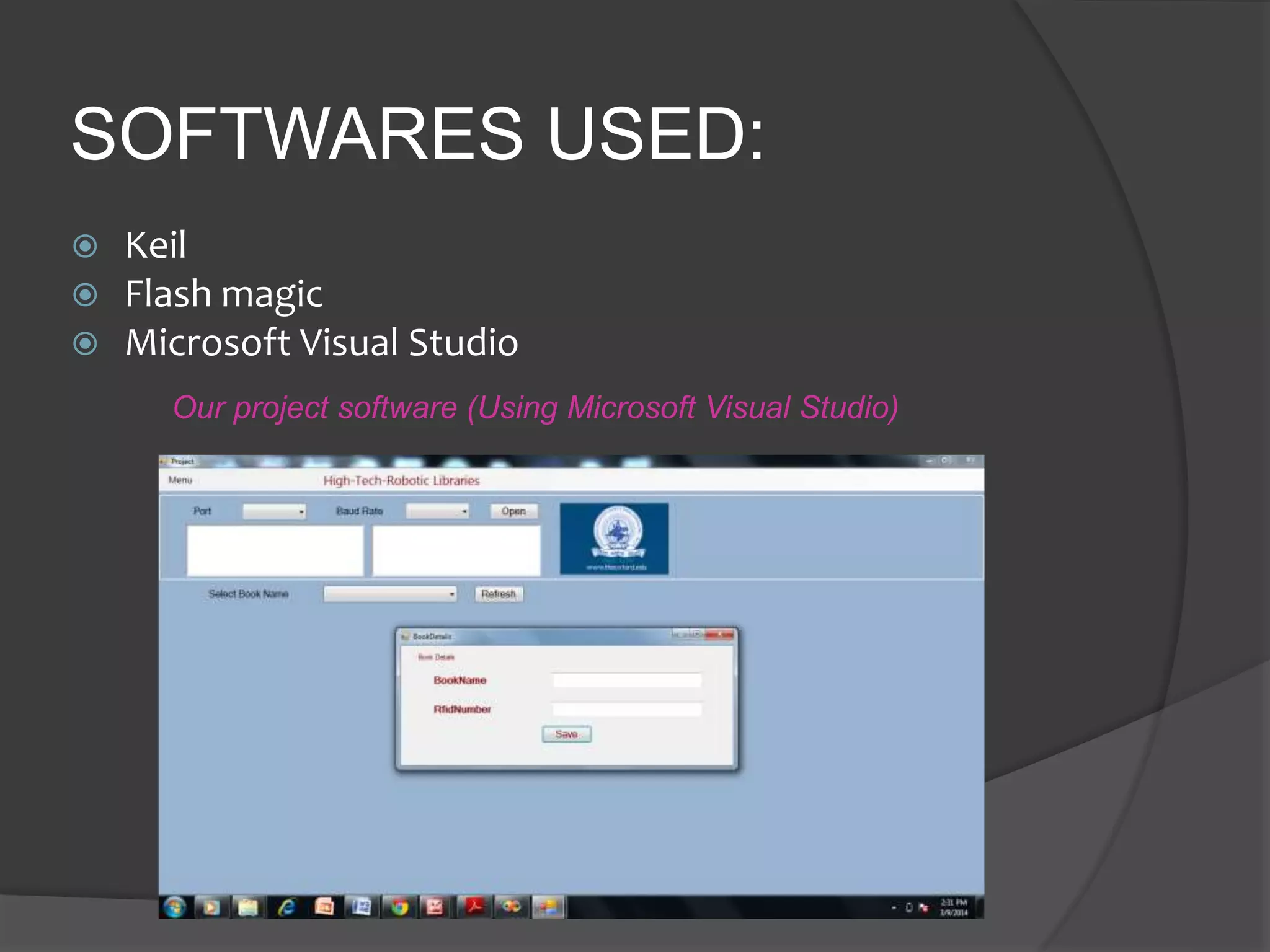
This document describes an automatic book picking robot designed for libraries, which uses RFID technology and a microcontroller to locate and retrieve books. It features a robotic arm with a gripper mechanism, DC motors for movement, and IR sensors for obstacle detection, aiming to reduce human effort and errors in book management. The robot can be applied in various environments including schools, malls, and central libraries, and helps streamline the process of finding and picking books.



![Robot operating system [ROS]](https://cdn.slidesharecdn.com/ss_thumbnails/robotoperatingsystemautosaved-200614222945-thumbnail.jpg?width=640&height=640&fit=bounds)