Downloaded 1,998 times















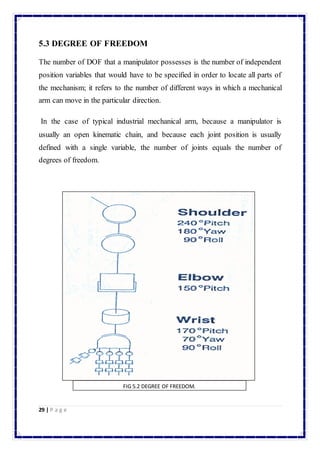

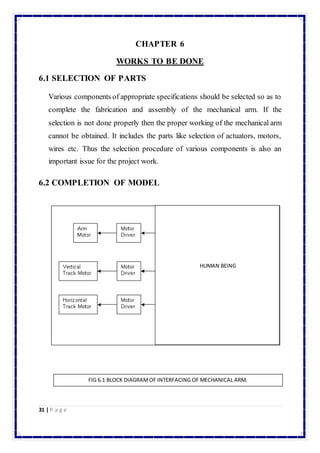




The document discusses the design of a pick and place mechanical arm for loading and packing lead batteries at a workstation. It provides background on the history and components of mechanical arms, including their structure, power sources, actuation methods, touch and vision capabilities, and types of manipulation end effectors. The document outlines the steps to be taken in designing the mechanical arm, including selecting the product, defining the workspace, determining degrees of freedom, selecting parts, and interfacing the arm with humans.























































































