Downloaded 2,597 times



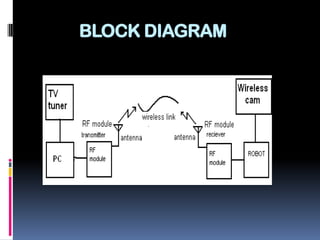
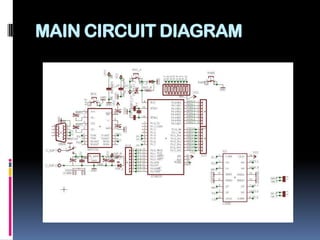
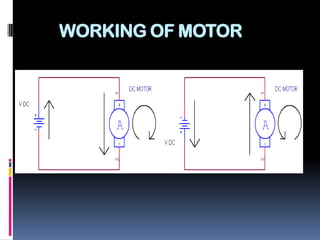












The document outlines the design and functionalities of a wireless pick and place surveillance robot, which is intended for use in hazardous environments across various applications, including military and medical fields. It details the mechanical, electronic, and software aspects of the system, highlighting components like a microcontroller and motors that enable its movement and operations. The robot is designed to be compact, reliable, and capable of operating remotely, aiming to assist in tasks such as transporting objects and aiding in surveillance.