Downloaded 18 times




















This document defines and describes robots. It begins by defining a robot as a programmable, self-controlled automatic device that functions like a living agent. It then discusses ideal robot tasks such as dangerous, boring, repetitive, or high-precision work. The document differentiates between automation and robots, describing types of robots based on mobility. It details characteristics like pick and place movements, continuous path control, and use of sensors. Performance measures, controls, and examples of industrial, military, and personal robots are provided. In conclusion, the document discusses advantages and limitations of robots as well as potential future applications using artificial intelligence.
Definition and characteristics of robots, including programmable devices with applications.
Ideal tasks for robots including dangerous, boring, high speed & precision tasks, and types based on mobility.
Key performance measures of robots, including working volume, speed, accuracy, and control systems.
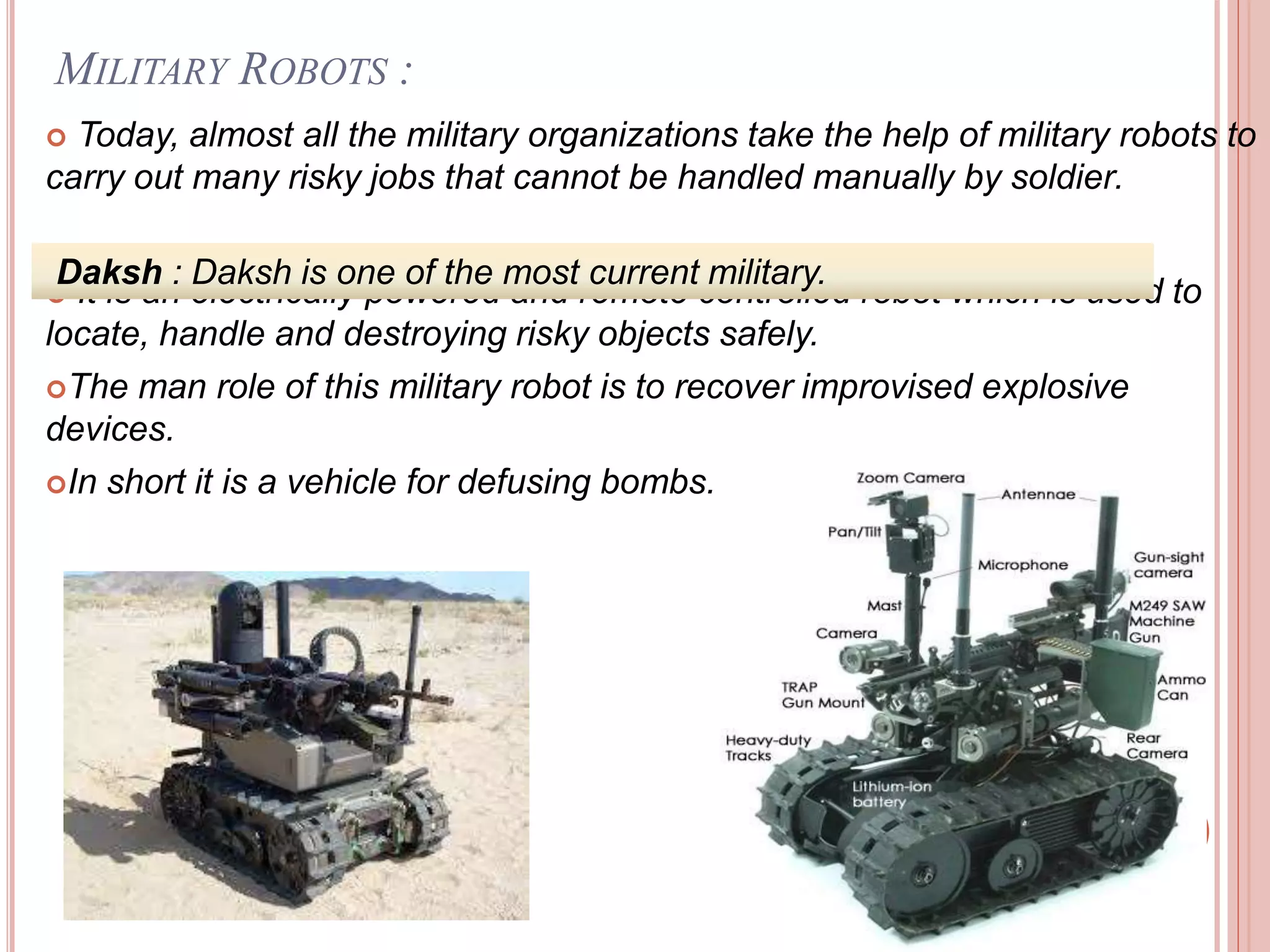
Different types of robots such as industrial, military, and personal robots with specific roles and applications.
Benefits of robots, such as speed and safety, versus limitations including job loss and high integration costs.
The potential evolution of robots with AI, capable of advanced tasks and remote operation.
Conclusion of the presentation and references for further information on robots.