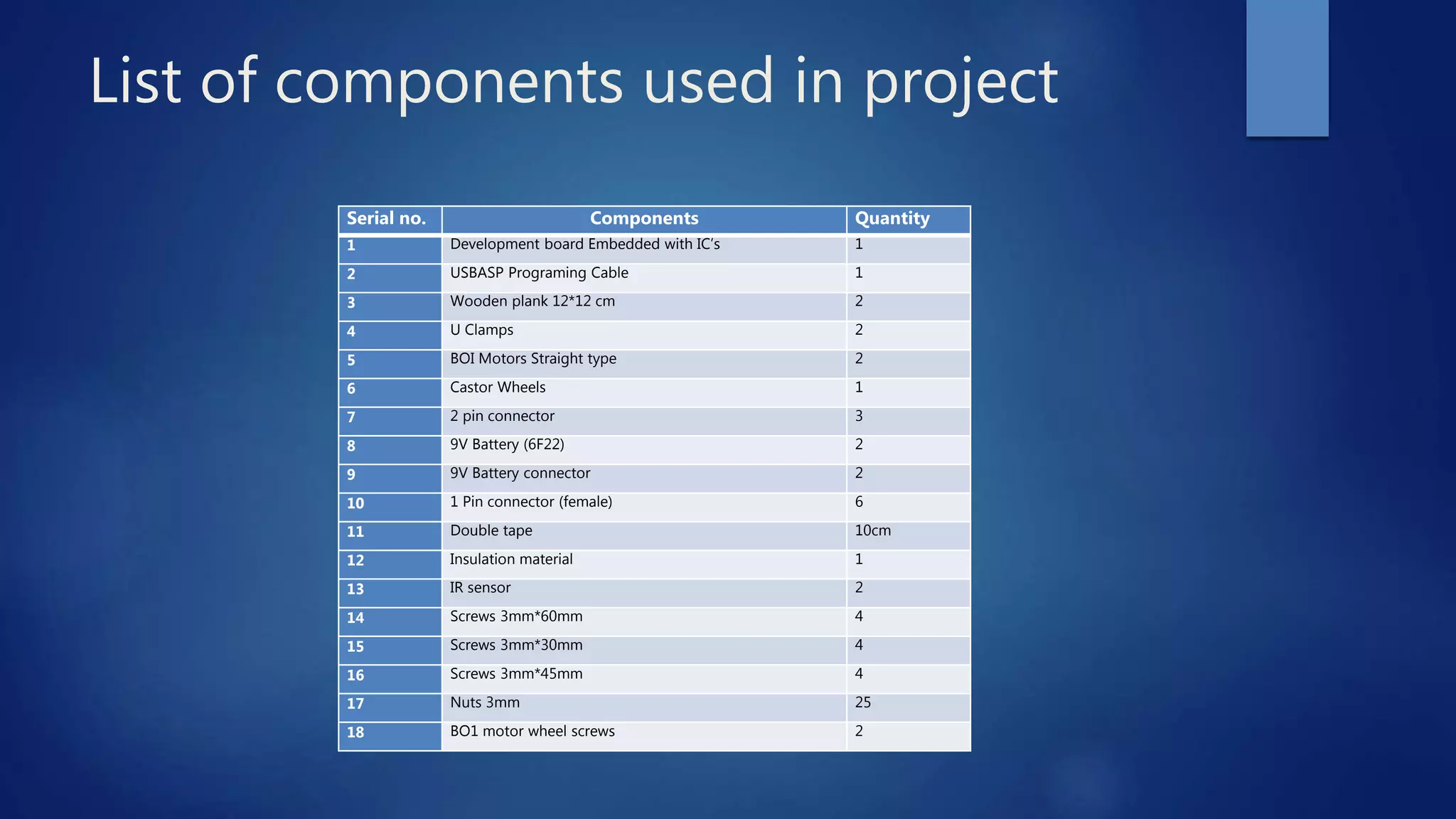
1) The document describes the design of a multifunctional and low-cost sensor-guided robot.
2) An objective is to create a robot that can perform tasks like line following and obstacle avoidance using reprogrammable and reusable components.
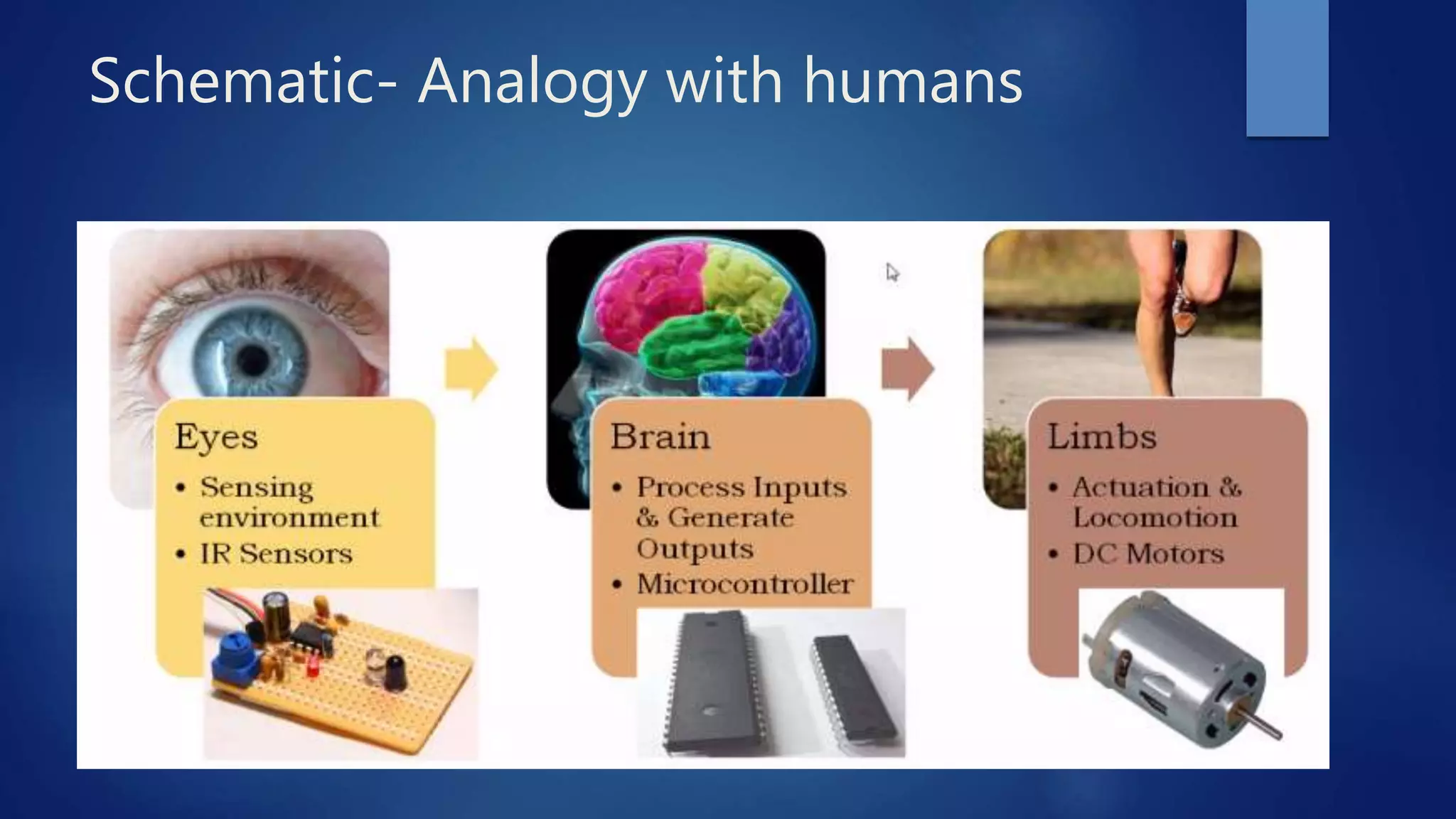
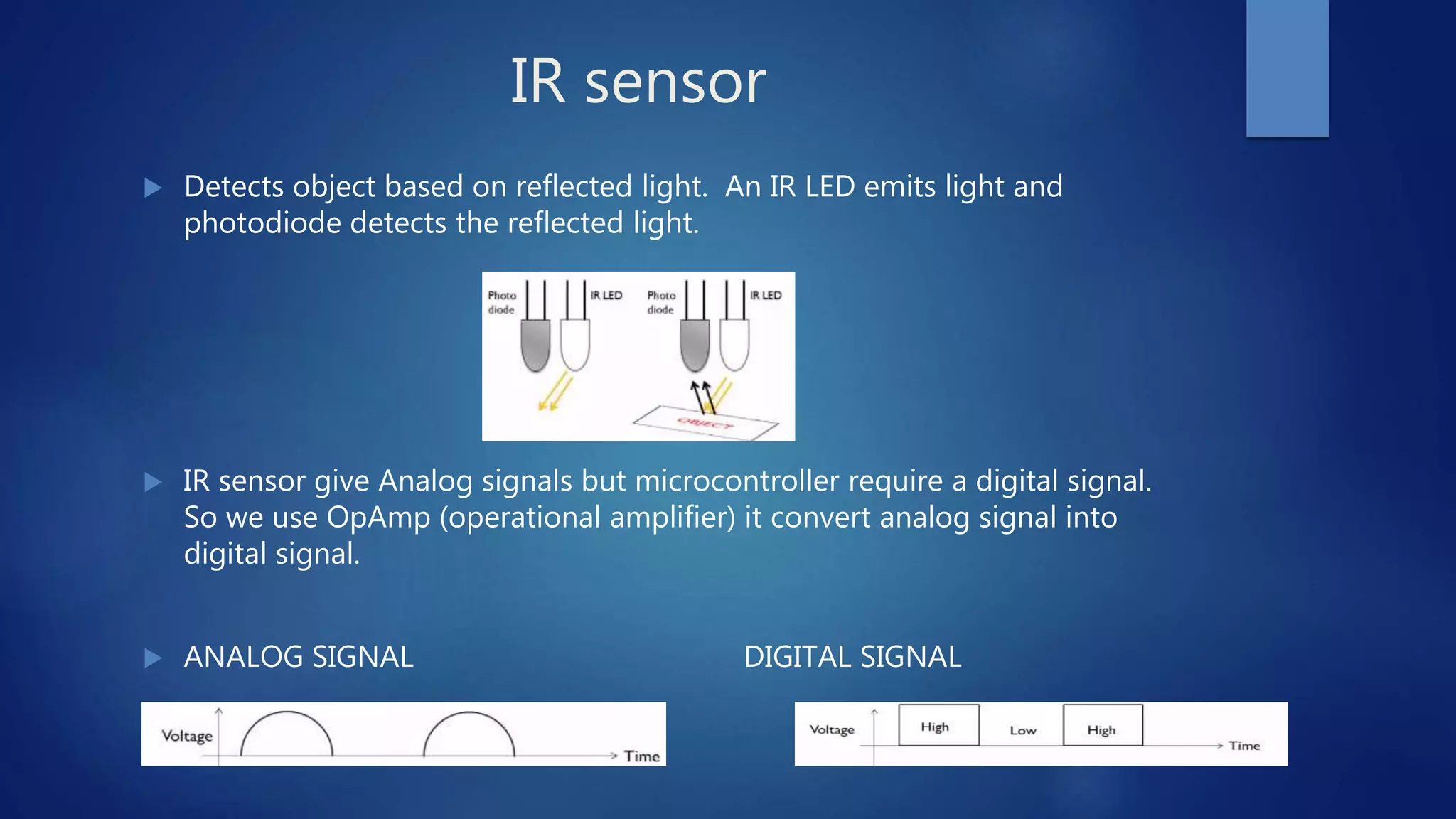
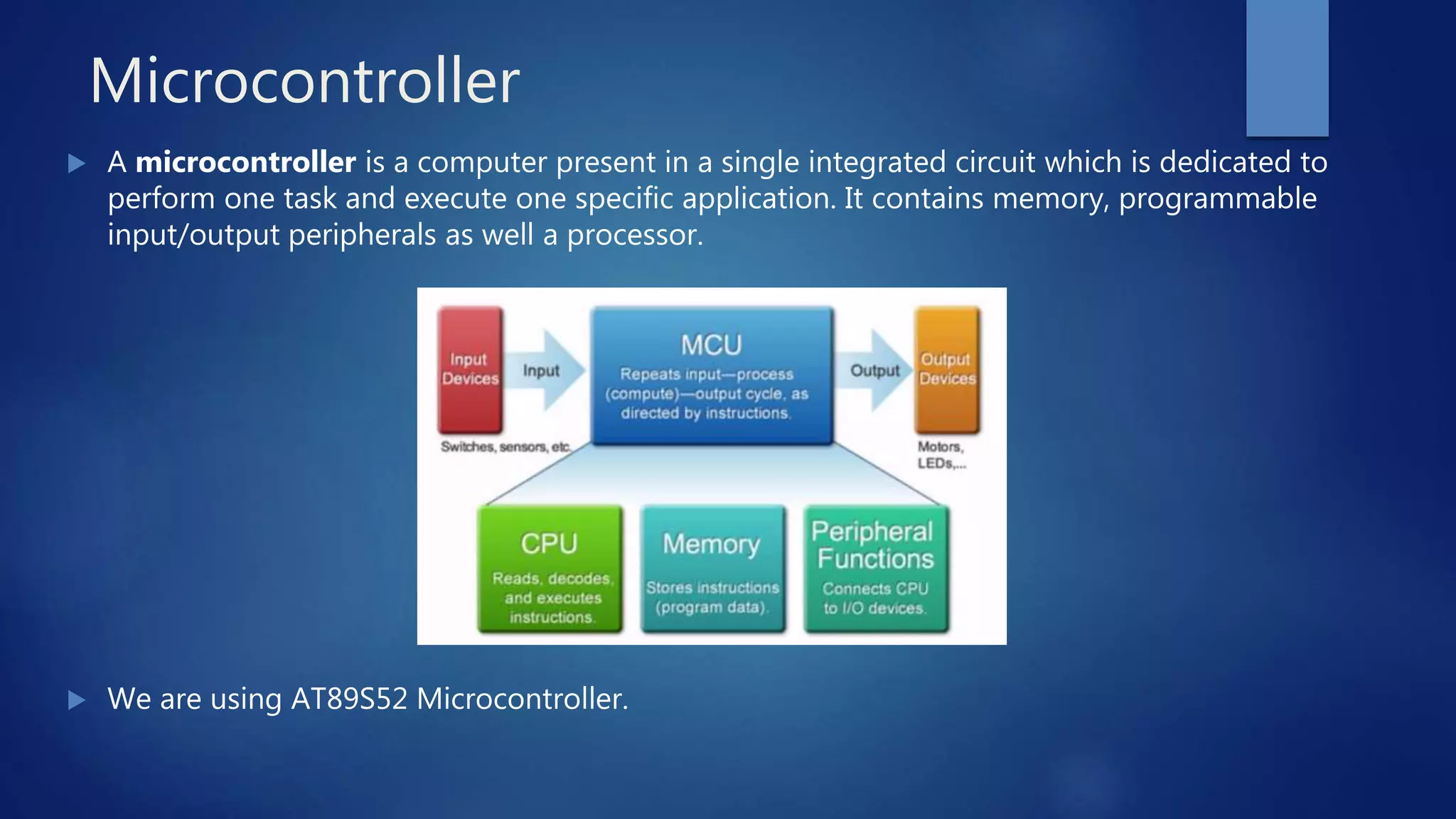
3) The robot uses an IR sensor connected to a microcontroller to guide its movements based on light sensor readings, with the goal of making it autonomous.