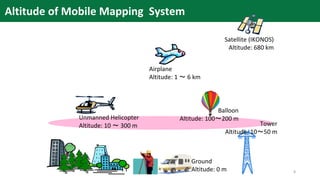
1. Unmanned aerial vehicles (UAVs) equipped with sensors can quickly collect geospatial data through mobile mapping. This allows accurate 3D modeling of disaster sites from different vantage points.
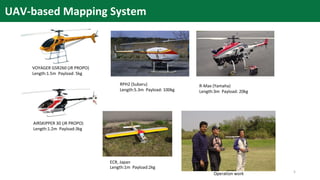
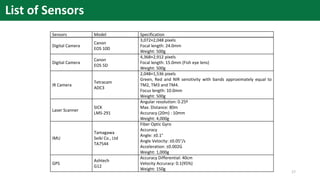
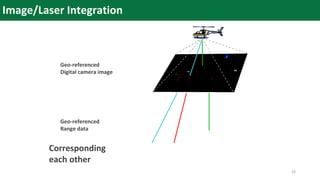
2. The document describes a UAV-based mapping system developed between 2003-2009 that integrates positioning sensors, cameras, and laser scanners. It provides examples of UAV models and discusses how the system can be used for search and rescue, surveillance, law enforcement, infrastructure inspection, and aerial mapping.
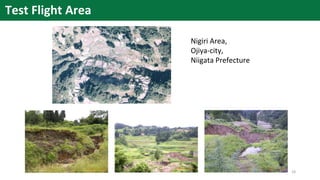
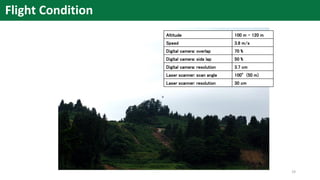
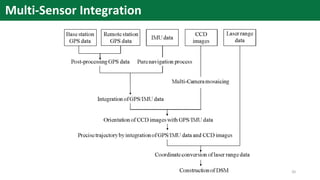
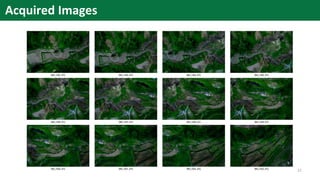
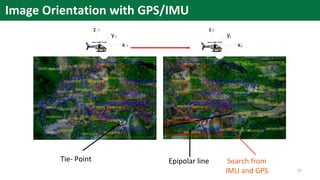
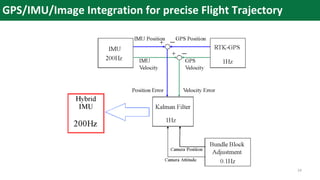
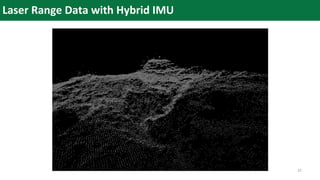
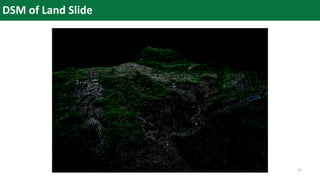
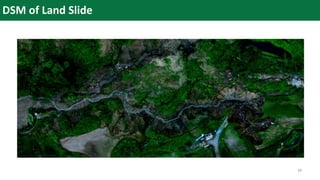
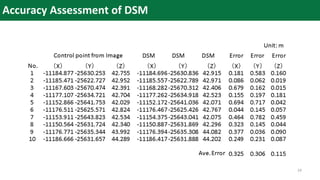
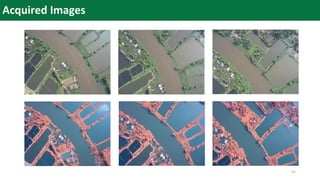
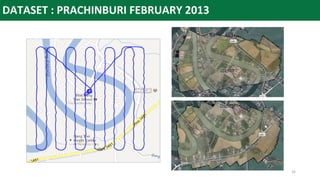
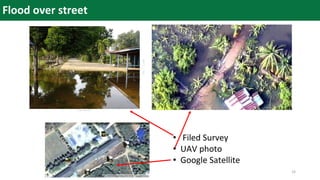
3. Applications discussed include creating high-resolution digital surface models (DSMs) and maps of landslides in Japan and flooded areas in Thailand to support disaster assessment and monitoring. Multi-sensor integration and