Download as PDF, PPTX
![UAV for Earth Observation
The potential of UAV for earth observation is obvious in terms of cost, handiness
and flexibility
Contribution from different communities: photogrammetry, robotics, computer
vision, artificial intelligence, space domain, electronics, navigation, etc.
Data processing is a combination of terrestrial & aerial techniques
Possibility to extract 2D and 3D information from acquired images
[Neubronner, 1903] [Wester-Ebbinghaus, 1980][Whittlesley, 1970] [Eisenbeiss, 2004]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-4-2048.jpg)
![after (Boehler, 2001)
0.1 m 1 m 10 m 100 m 1 km 10 km 100 km 1000 km
10 Mil
1 Mil
100 000
10 000
1 000
100
10
1
Object/SceneComplexity[points/object]
Object / Scene Size
Close-range
photogrammetry
and
terrestrial laser scanners
Aerial
photogrammetry
and LiDAR
Satellite
Remote Sensing
Tactile / CMM
Hand
measurements
Total stations
GNSS
UAV for 3D Data Recording
UAV](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-6-2048.jpg)
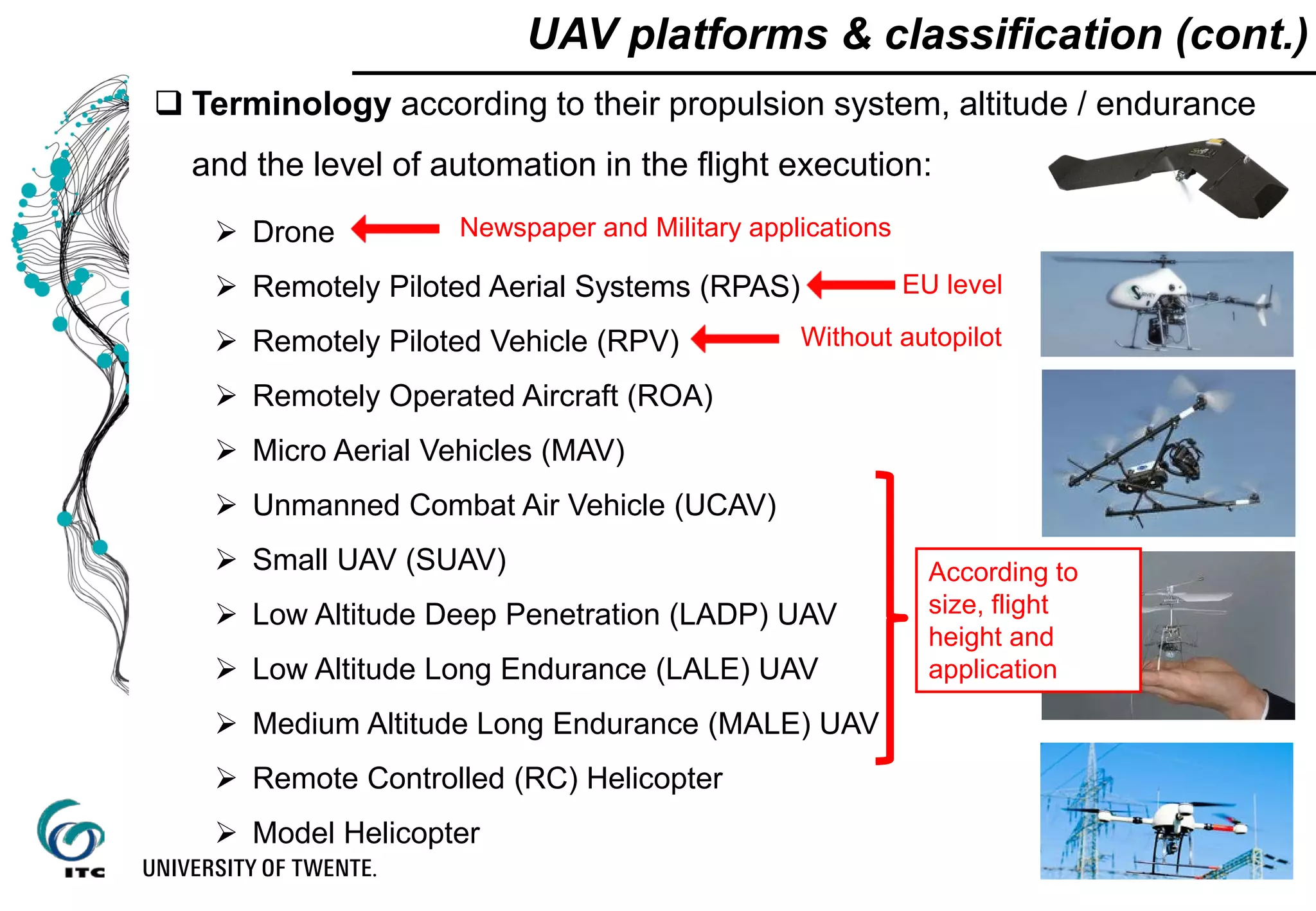
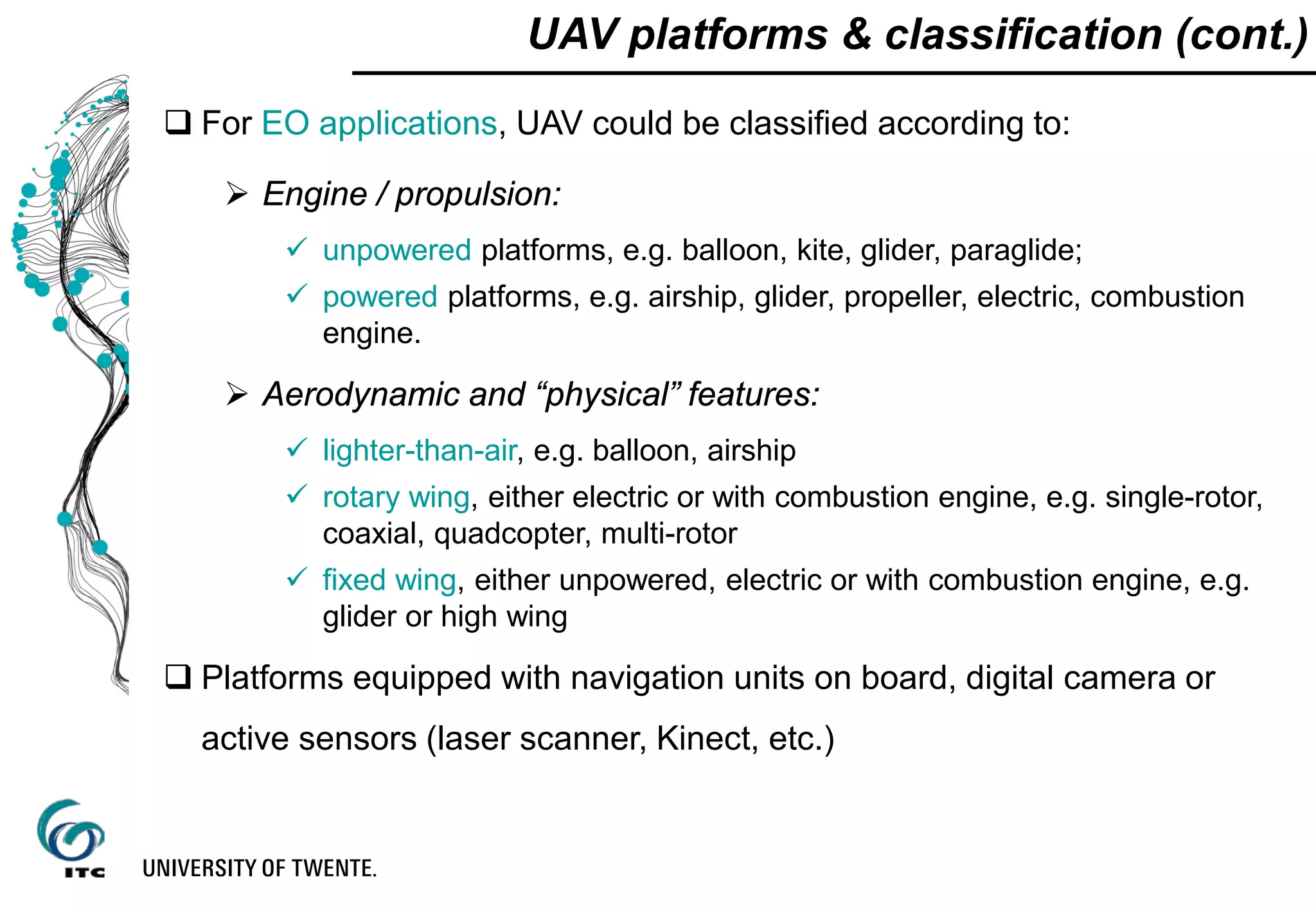
![UAV platforms & classification (cont.)
Range [km]
Altitude[m]
1 10 100 1000 5000
100
1000
5000
10000
Micro
Mini
Close-range
Short-range
Low altitude endurance
Medium altitude
long endurance
High altitude
long endurance
[after Blyenburg, 1999]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-8-2048.jpg)

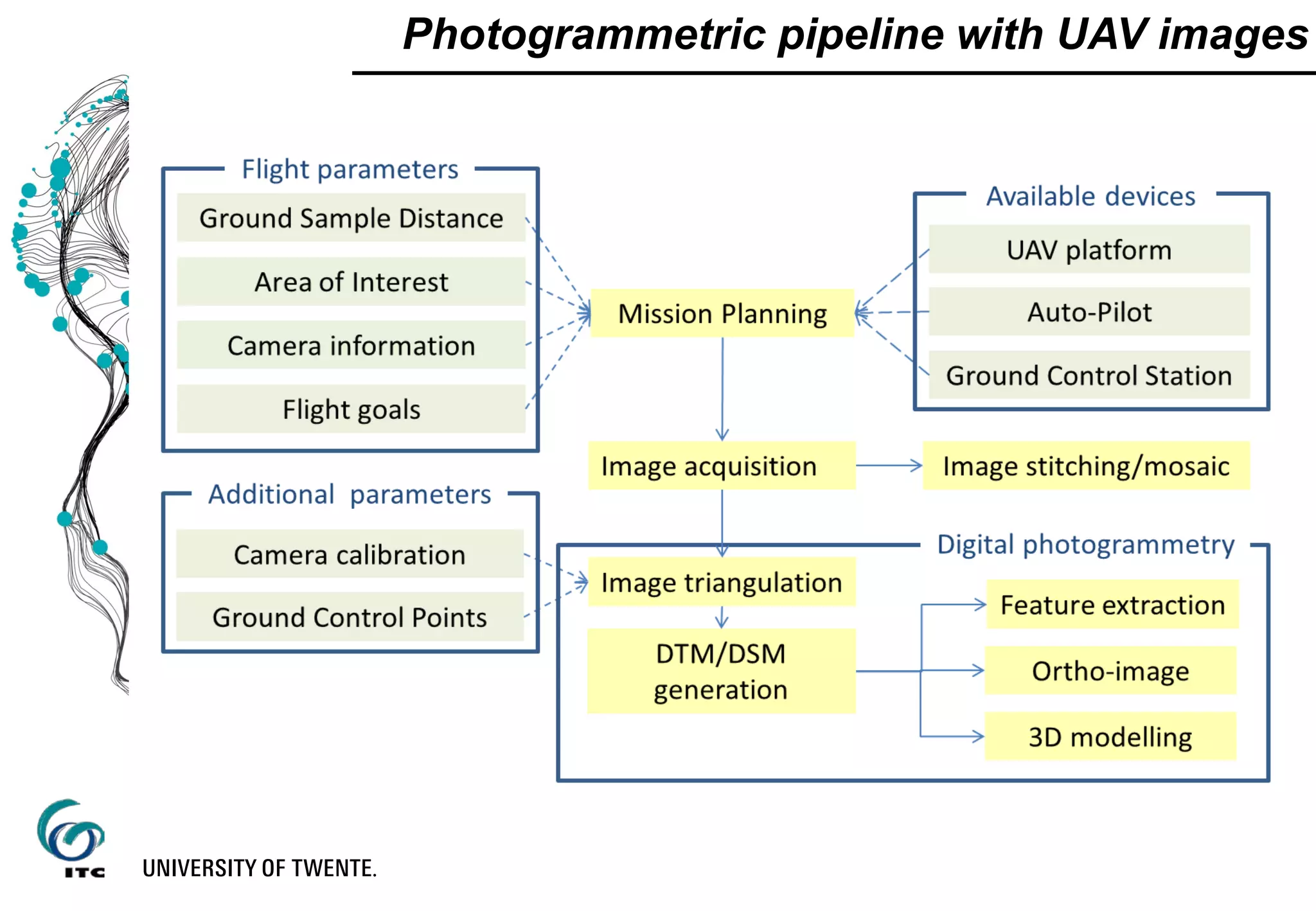
![Photogrammetric pipeline with UAV images
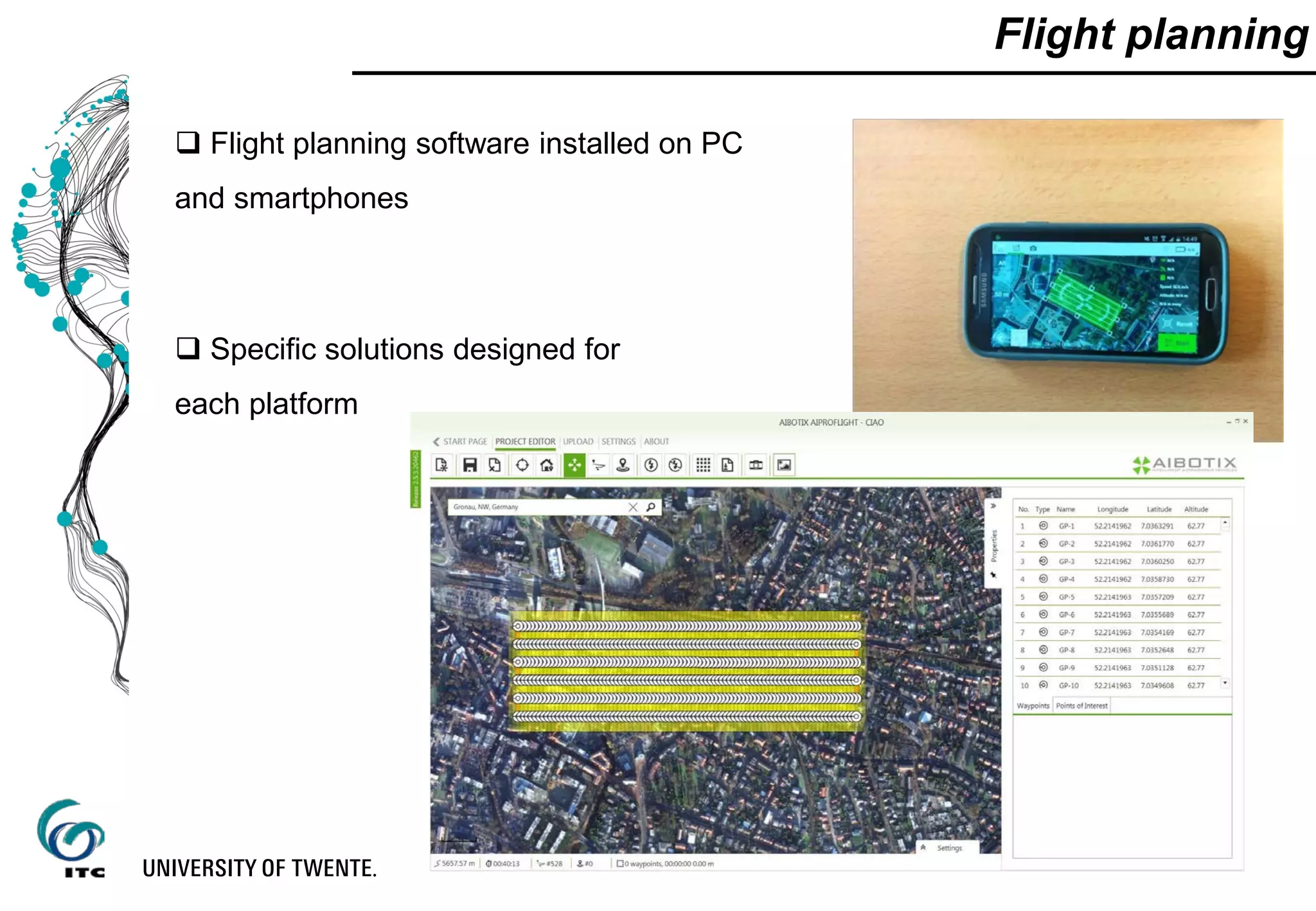
Flight planning (designing, requirements, system performances, etc.)
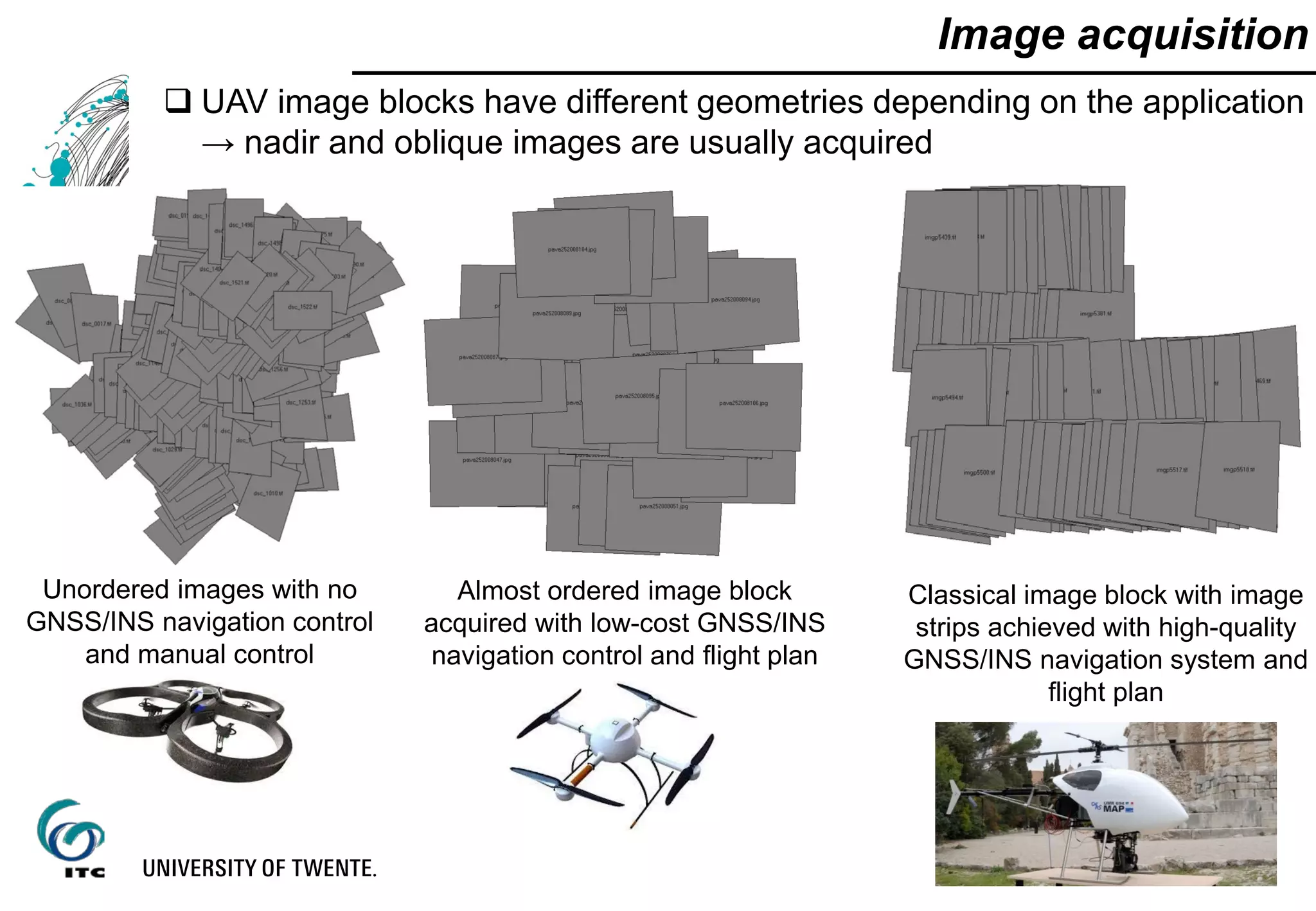
Image acquisition (autonomous, manual, GSM-based, waypoint
navigation, etc.)
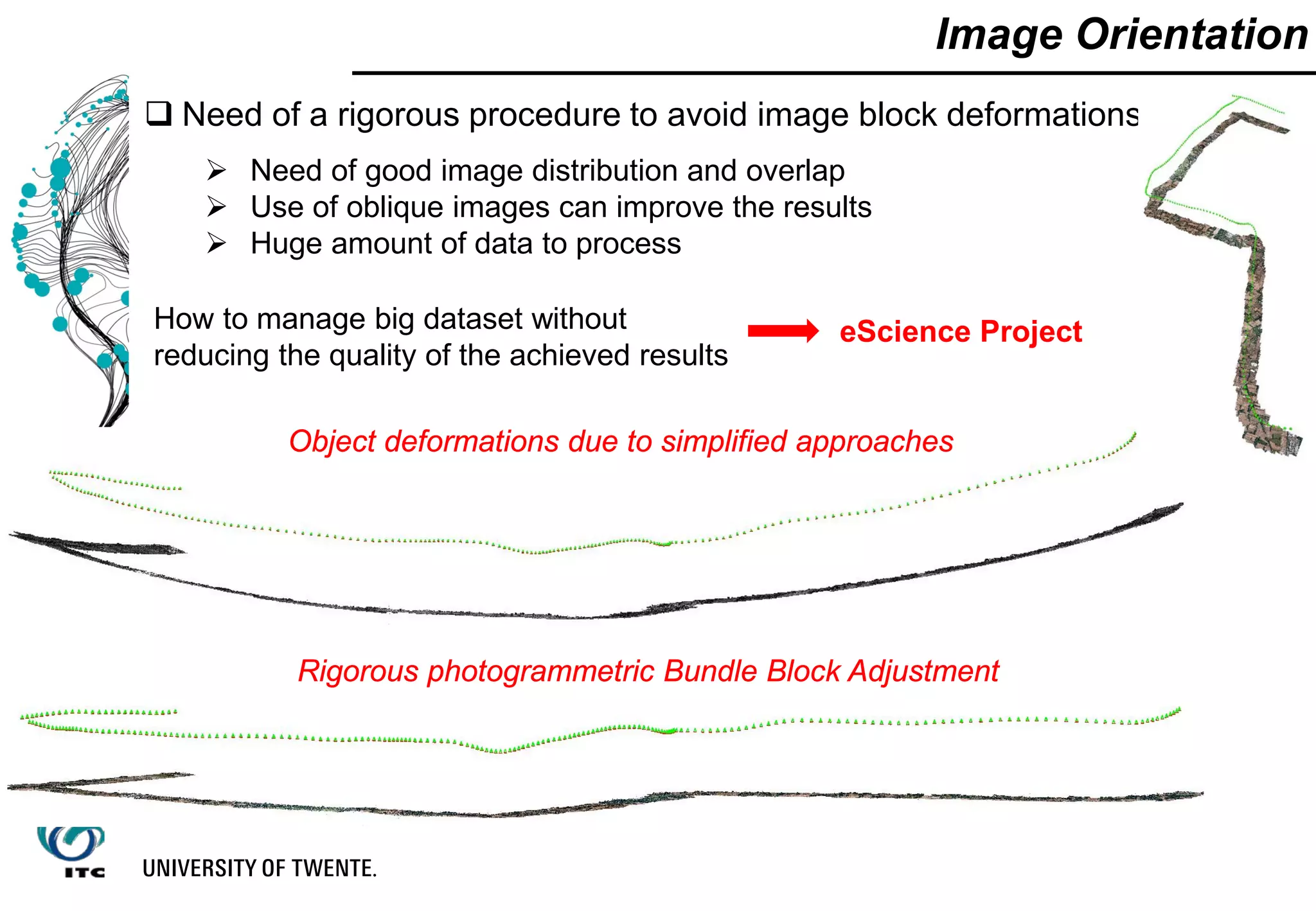
Image triangulation & geo-referencing
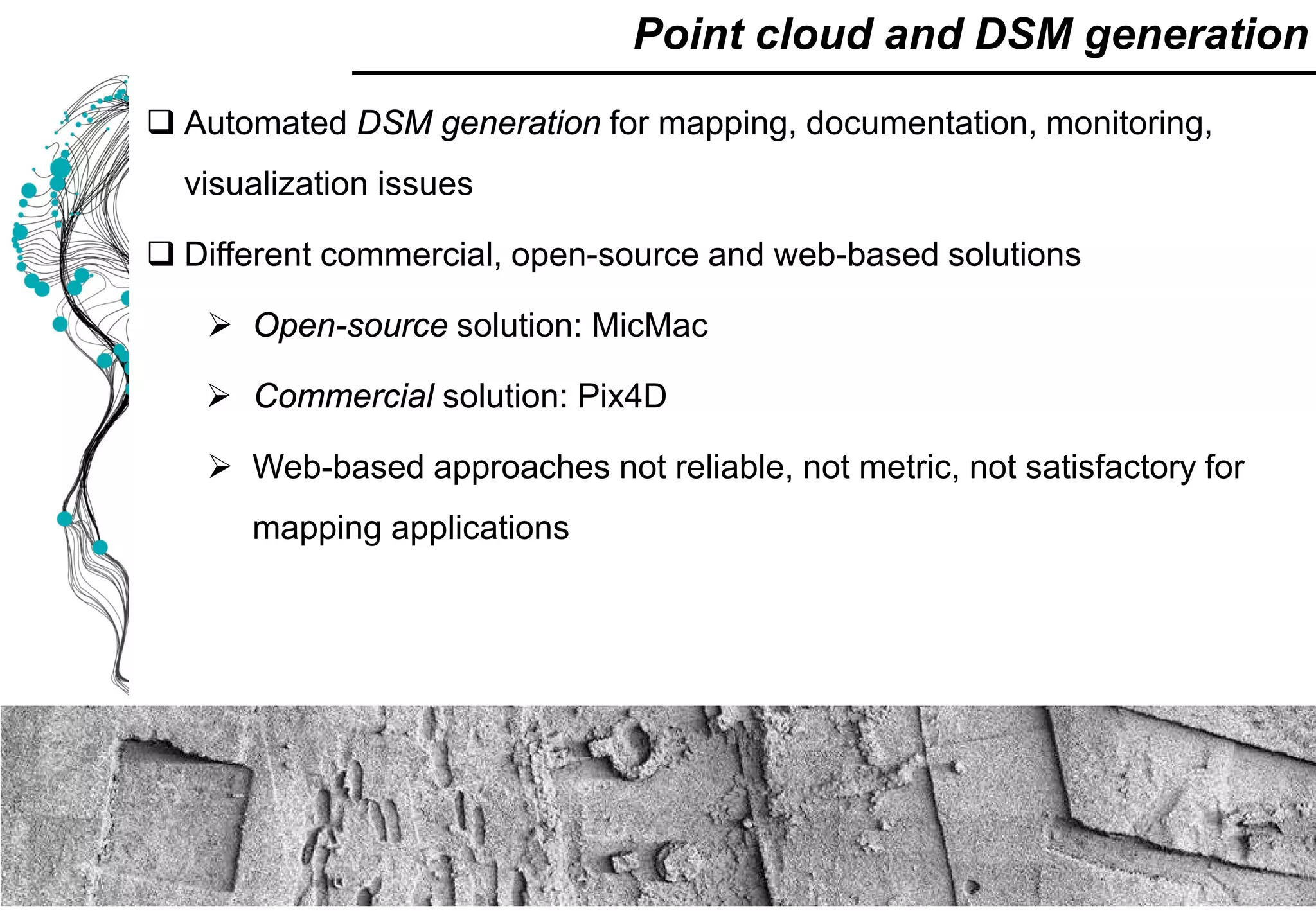
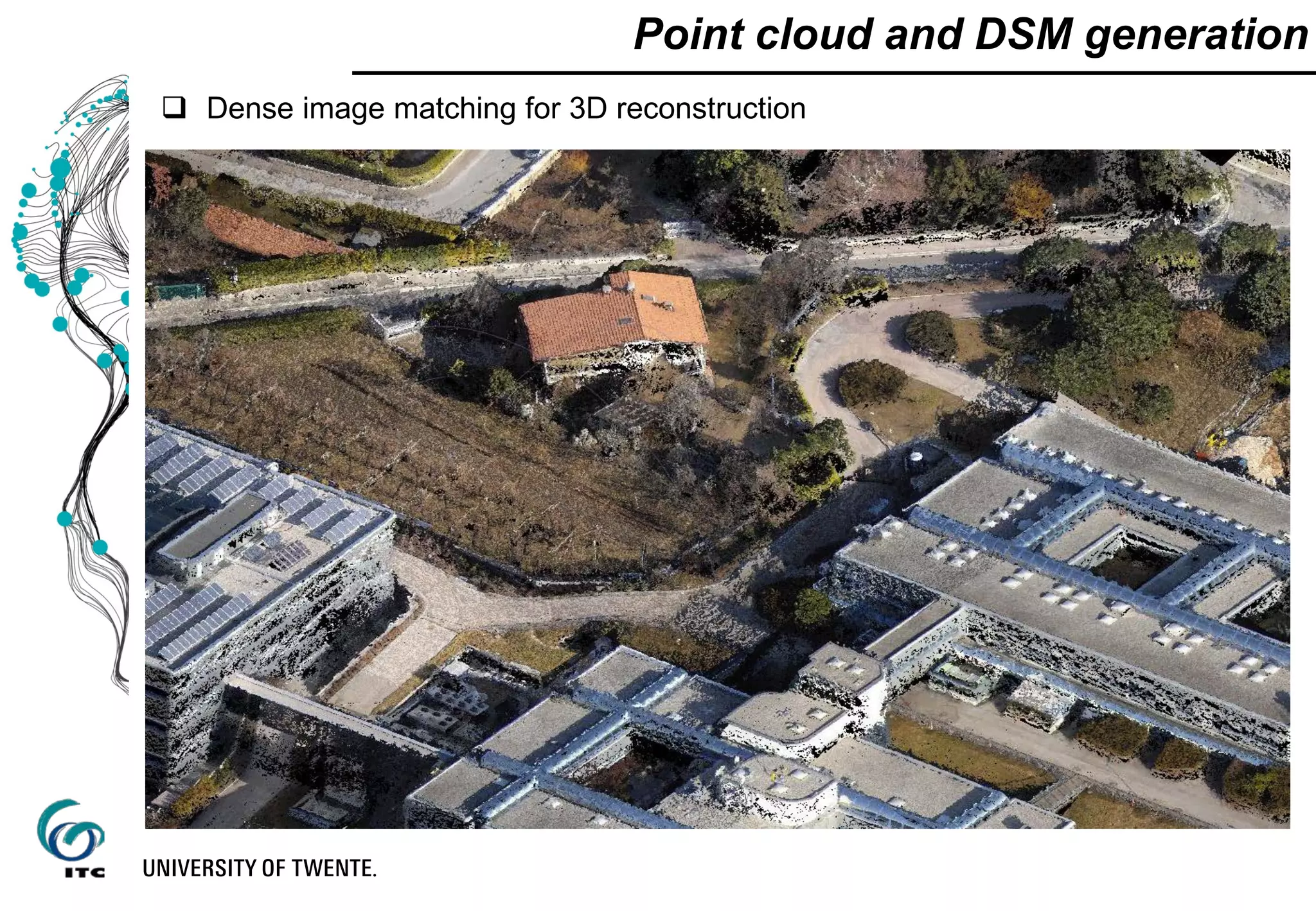
Dense point cloud and Digital Surface Model generation
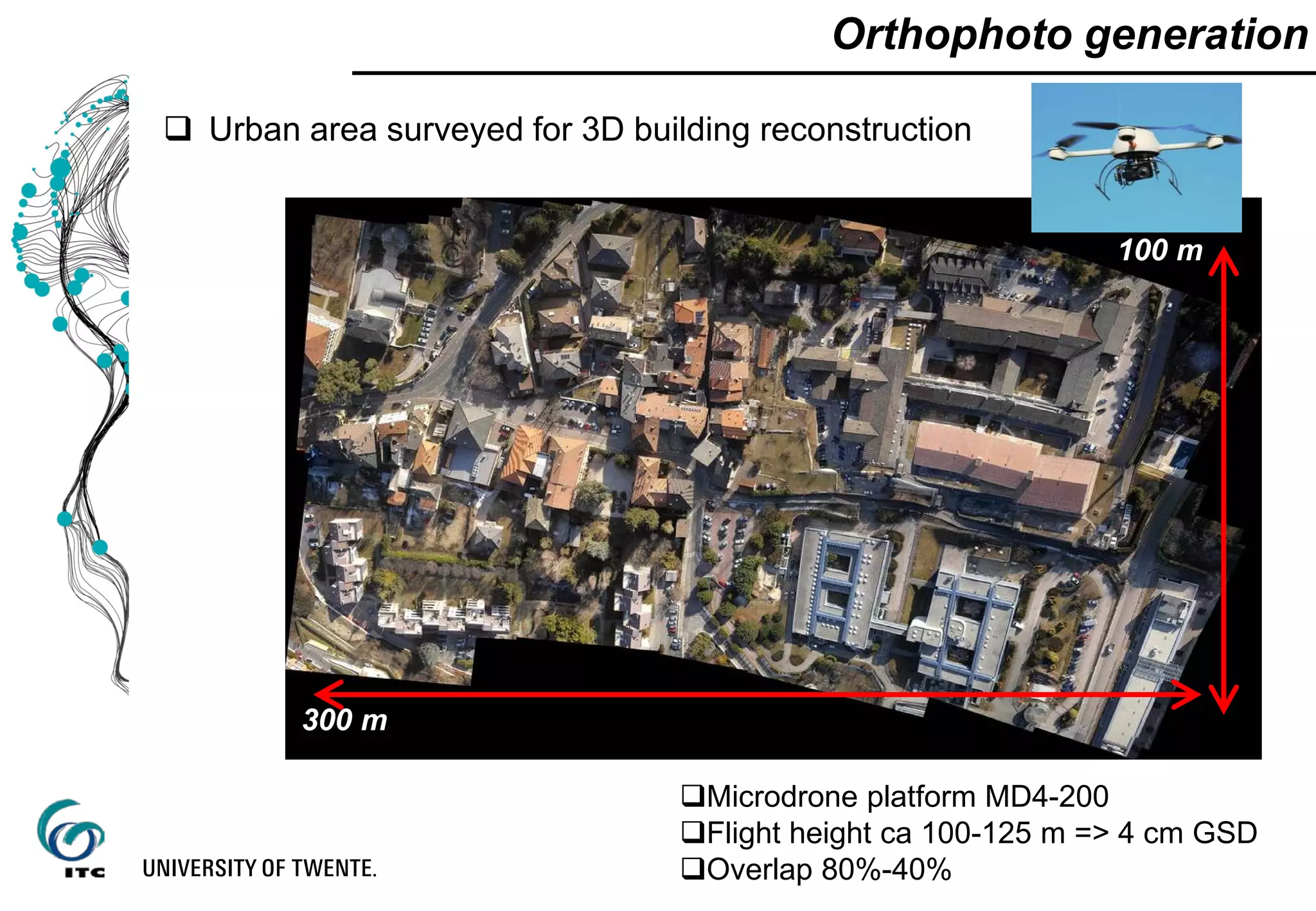
Ortho-image generation
Feature extraction
[Architectural Image-based Modeling web portal - http://www.map.archi.fr/aibm/]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-16-2048.jpg)
![ Direct geo-referencing
Need very good GNSS/INS observations
High-cost navigation sensors needed
Not sufficient with very high resolution images (<1 cm)
Possible use of GNSS or total station to track / follow the
UAV [Blaha, 2011]
Image orientation - georeferencing
GNSS / INS observations
Helpful to assist the identification of
homologous points [Barazzetti el al., 2011]
Can provide a first scale and georeferencing
image
connection
Ground control points (GCP)
When high accuracy is needed](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-21-2048.jpg)
![Time effort in UAV-based photogrammetric workflow
[Nex and Remondino, 2014]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-25-2048.jpg)
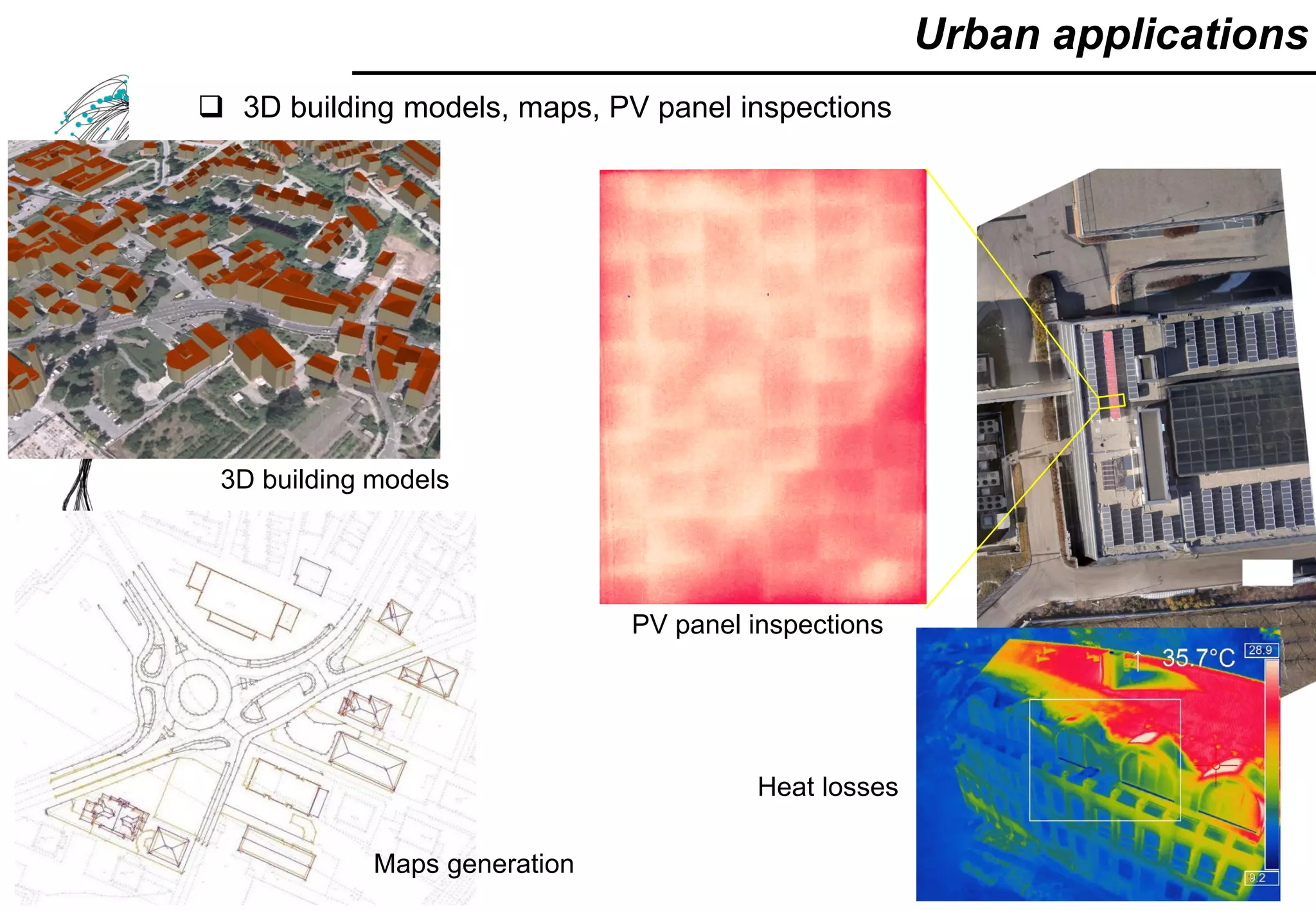
![ Interactive system to check the PV potential of building roofs
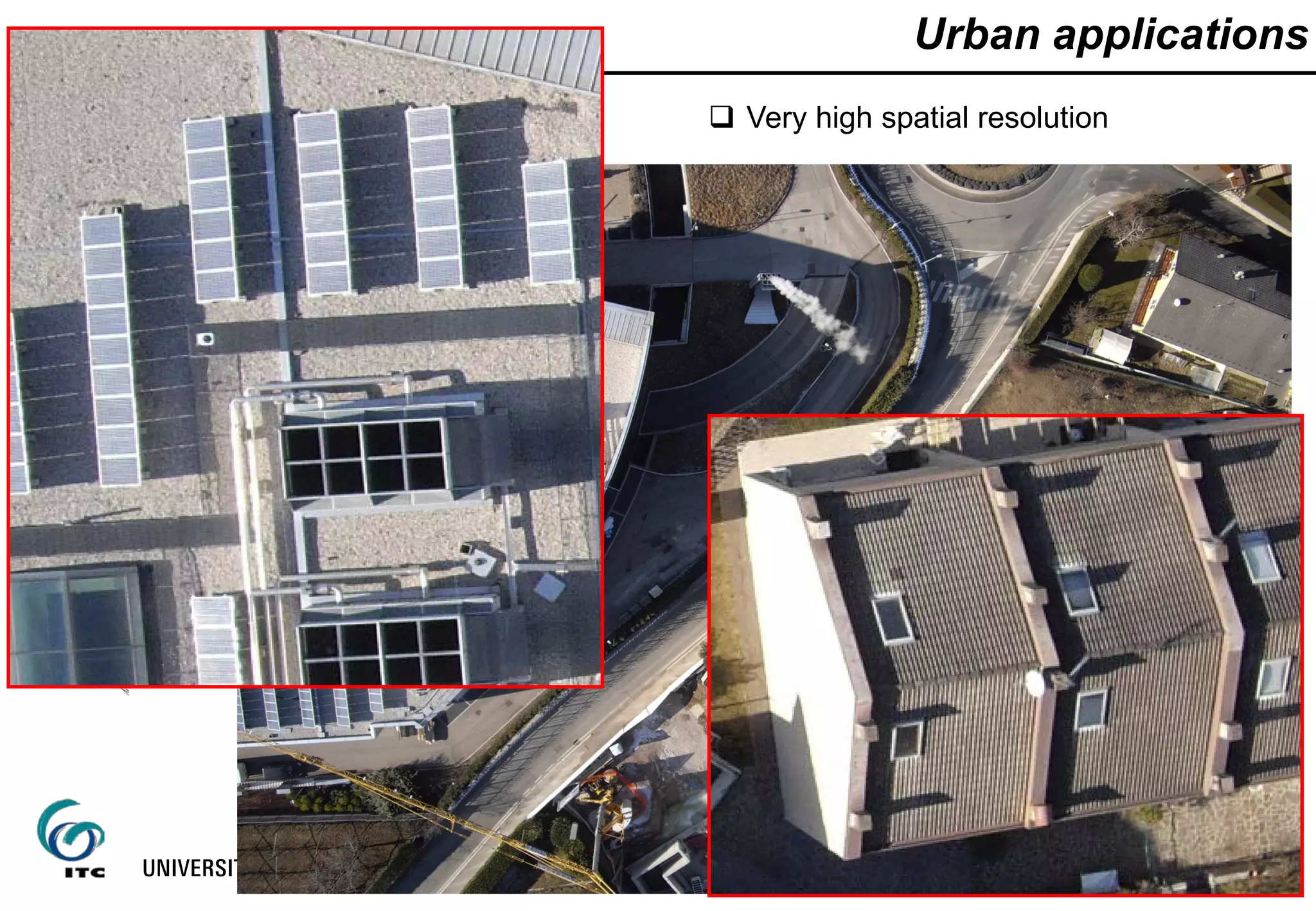
High resolution → reconstruction of building installations (i.e. chimneys, etc.)
Urban applications – Solar potential
[Nex et al., 2013]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-28-2048.jpg)
![Quick map generation and updating
Large UAV block (Kigali, Rwanda)
18000 UAV images
3 cm GSD resolution
80% along track overlap
40% across track overlap
[source: Gevaert – UT, ITC]
Improving Open-Source
Photogrammetric Workflows for
Processing Big Datasets
eScience Project](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-29-2048.jpg)
![Quick map generation and updating
Change detection and map updating in new built areas
Semi-automated
methodologies to reduce field
work and map generation
[Muneza, 2015 – UT, ITC Master Thesis]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-30-2048.jpg)
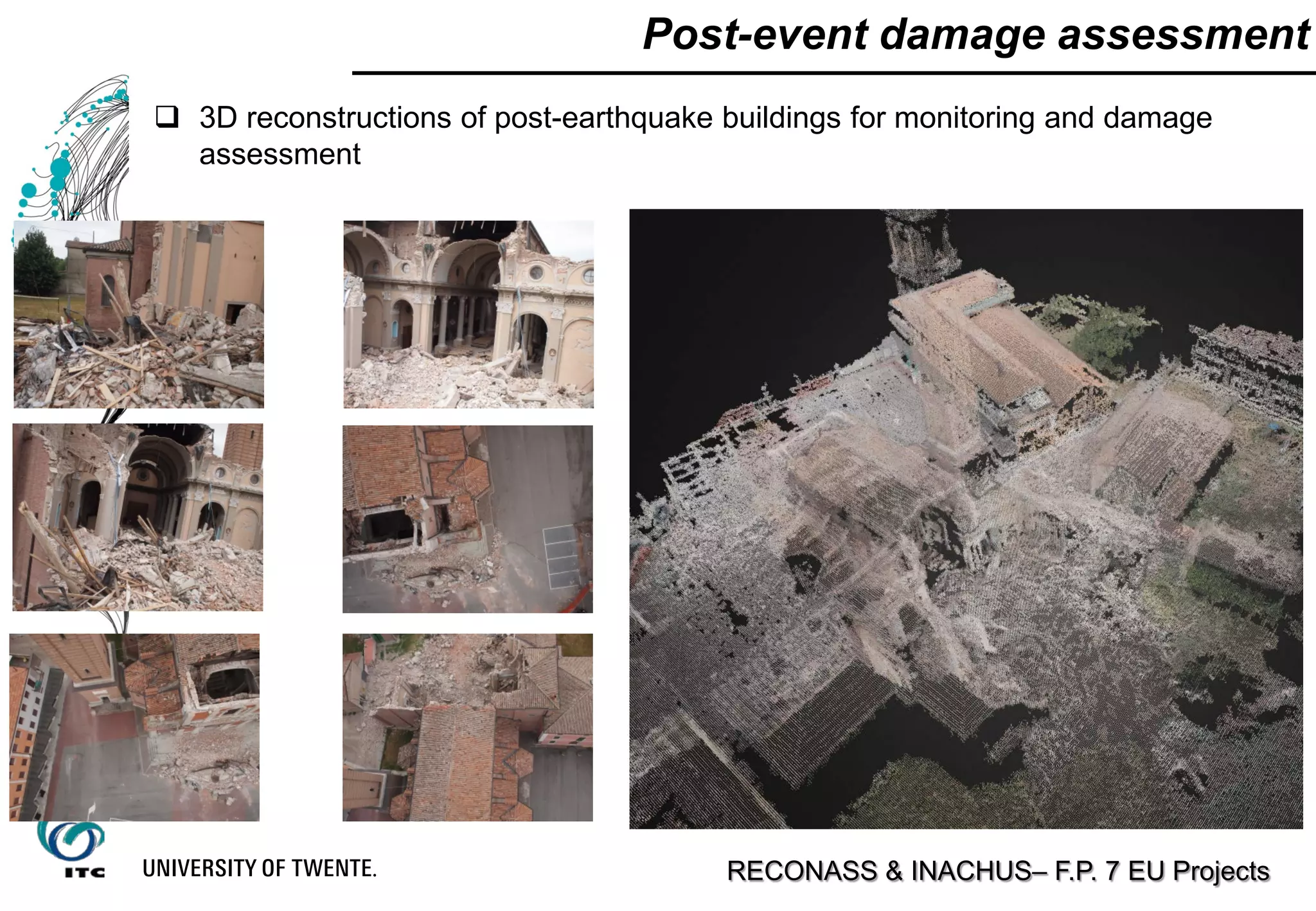
![Post-event damage assessment
RECONASS & INACHUS– F.P. 7 EU Projects
3D reconstructions of post-earthquake buildings for monitoring and damage
assessment
Automated damage
assessment
[Vetrivel et al., 2015]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-32-2048.jpg)
![Post-event damage assessment
DSM
ORTHOPHOTO
SEGMENTATION
URBAN CLASSIFICATION
[Nex et al., 2014]
Damage assessment on large urban areas](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-33-2048.jpg)
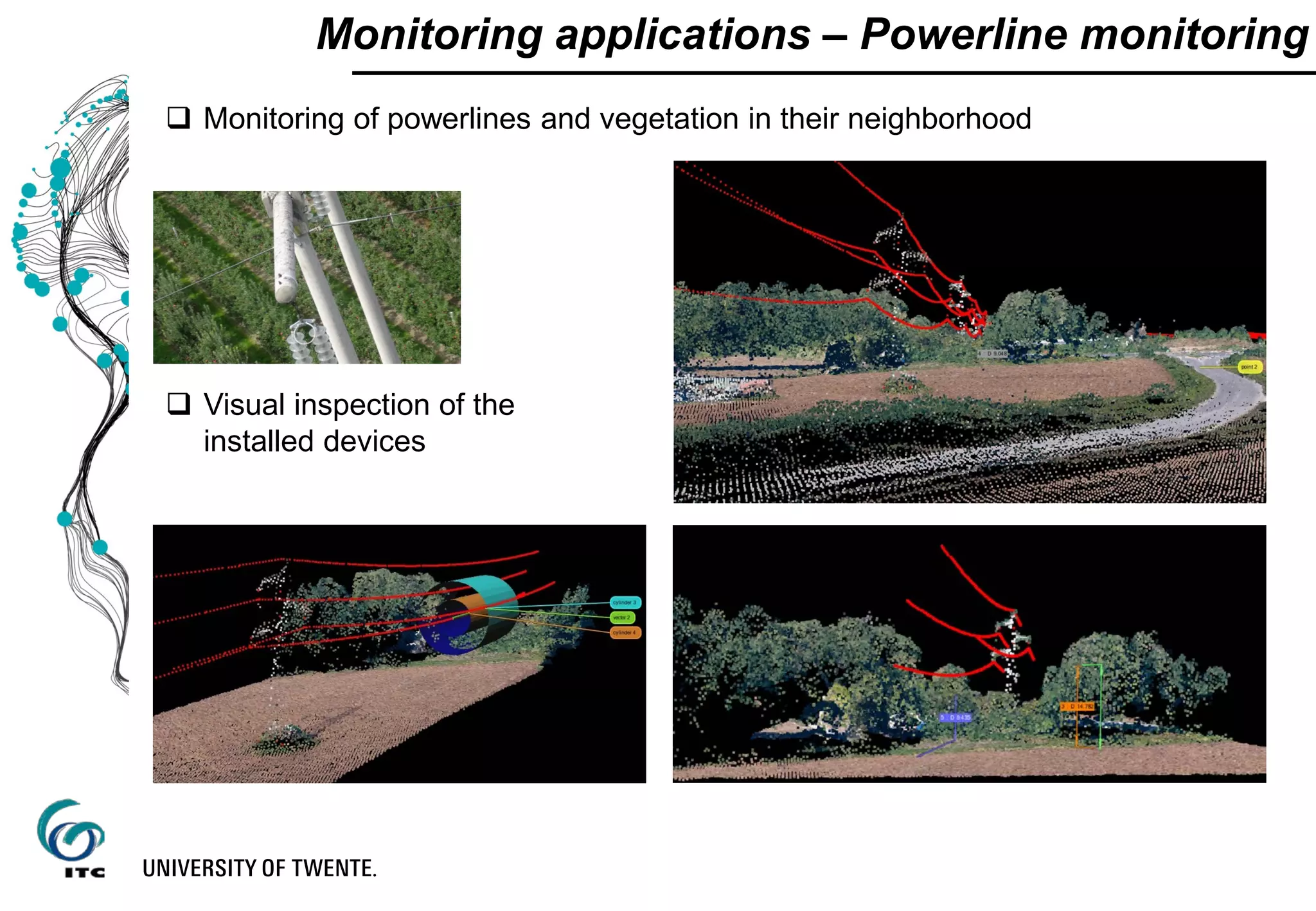
![[Tournandre et al., 2015]
Monitoring applications - Dykes monitoring
Accurate monitoring of surface changes every year](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-35-2048.jpg)
![Monitoring applications - Construction sites
Multi-temporal data acquisition to
monitor the construction site
progresses
Acquired image blocks can be
automatically co-registered together
Very high dense DSM are generated
for each flight
[Nyapwere, 2015 – UT, ITC Master thesis]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-36-2048.jpg)
![ Multi-temporal data acquisition to
monitor the construction site
progresses
Generated DSMs can be
automatically aligned together
Very high dense DSM can be
generated from each flight
An orthophoto and a 3D mesh
can be automatically generated
using the same dataset
Monitoring applications - Construction site
[Nyapwere, 2015 – UT, ITC Master thesis]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-37-2048.jpg)
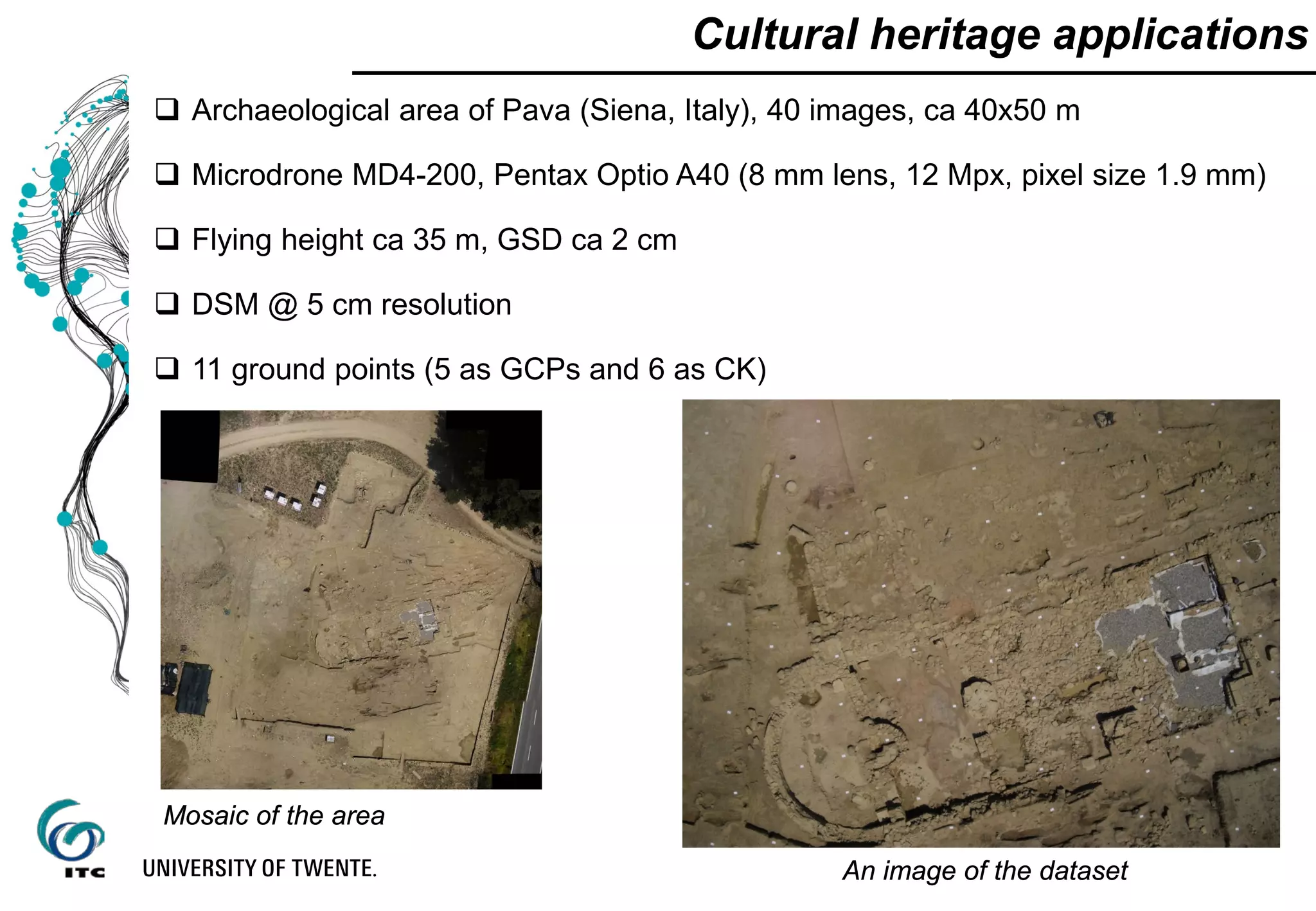
![Cultural Heritage applications – multi-temporal
Multi-temporal flights over the area – DSM comparisons to map / compute
excavation volumes
[Nex and Remondino, 2014]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-39-2048.jpg)
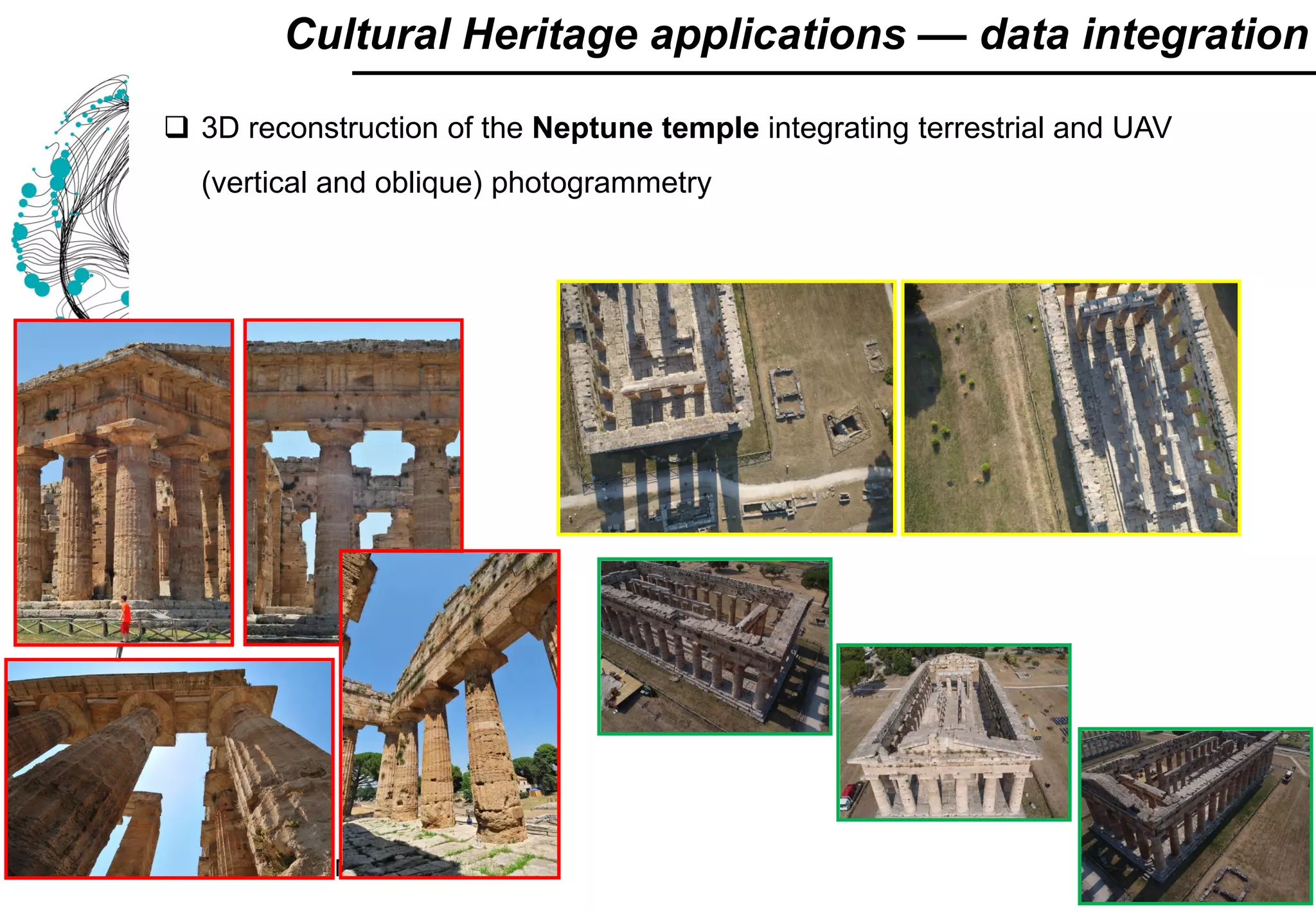
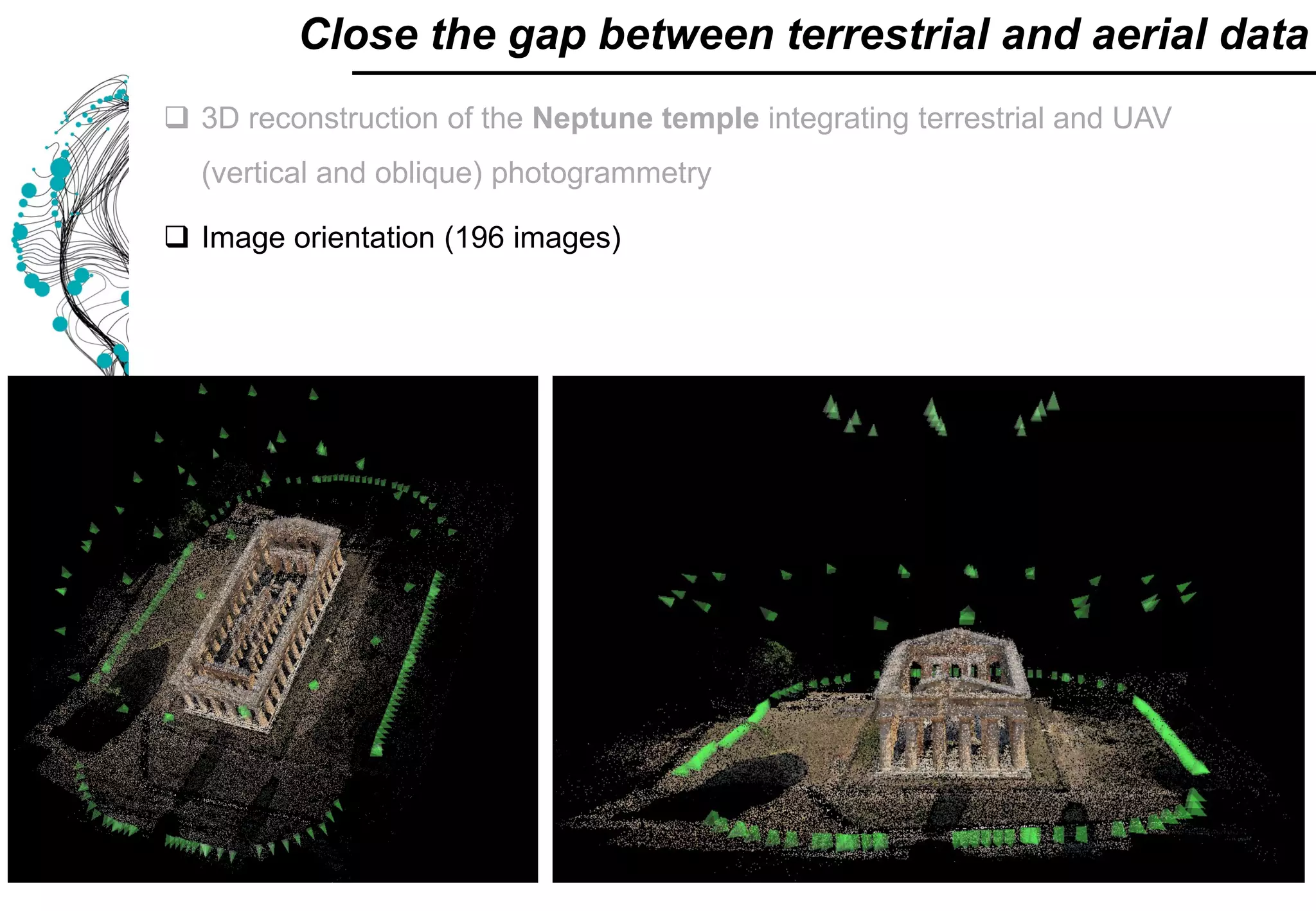
![ 3D reconstruction of the Neptune temple integrating terrestrial terrestrial and
UAV (vertical and oblique) photogrammetry
Image orientation (196 images)
3D model generation
Close the gap between terrestrial and aerial data
[Nex and Remondino, 2014]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-42-2048.jpg)
![ Biomass estimation
Forestry
Forest inventory
[source GreenValley and Aibotix]](https://image.slidesharecdn.com/dsd-int2015-photogrammetricworkflowsanduseofuavsfrancesconexesciencecenterutwente-151110073757-lva1-app6892/75/DSD-INT-2015-Photogrammetric-workflows-and-use-of-UA-VS-Francesco-nex-E-science-center-Utwente-44-2048.jpg)

The document discusses the use of unmanned aerial vehicles (UAVs) for earth observation applications. It provides an overview of UAV classification systems and discusses photogrammetric workflows using UAV imagery. Common applications described include urban monitoring, environmental monitoring, agriculture/forestry, and archaeological documentation. Both pros and cons of UAVs for earth observation are presented, noting their flexibility but also technological and regulatory limitations.











































































































