Downloaded 341 times
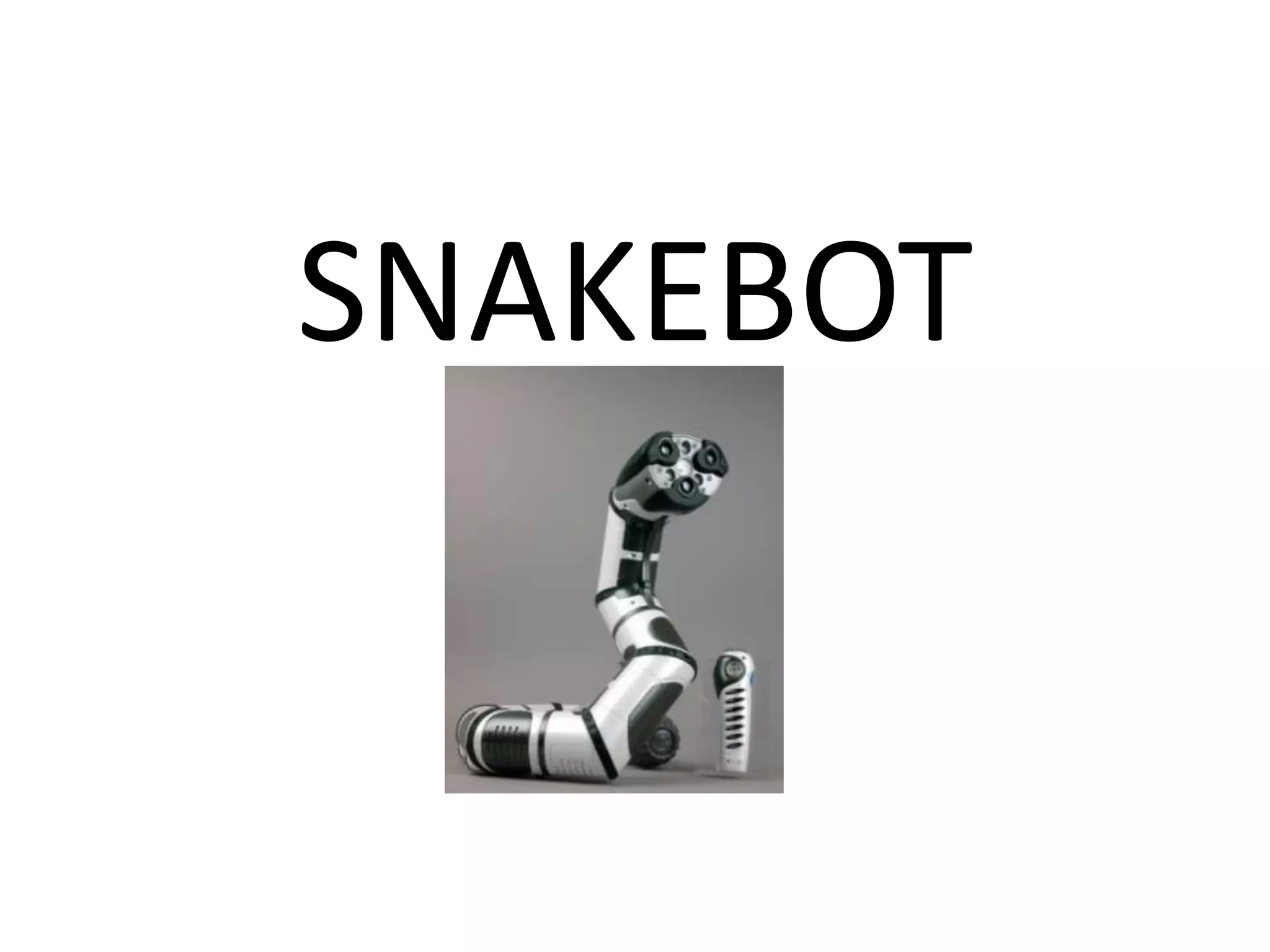
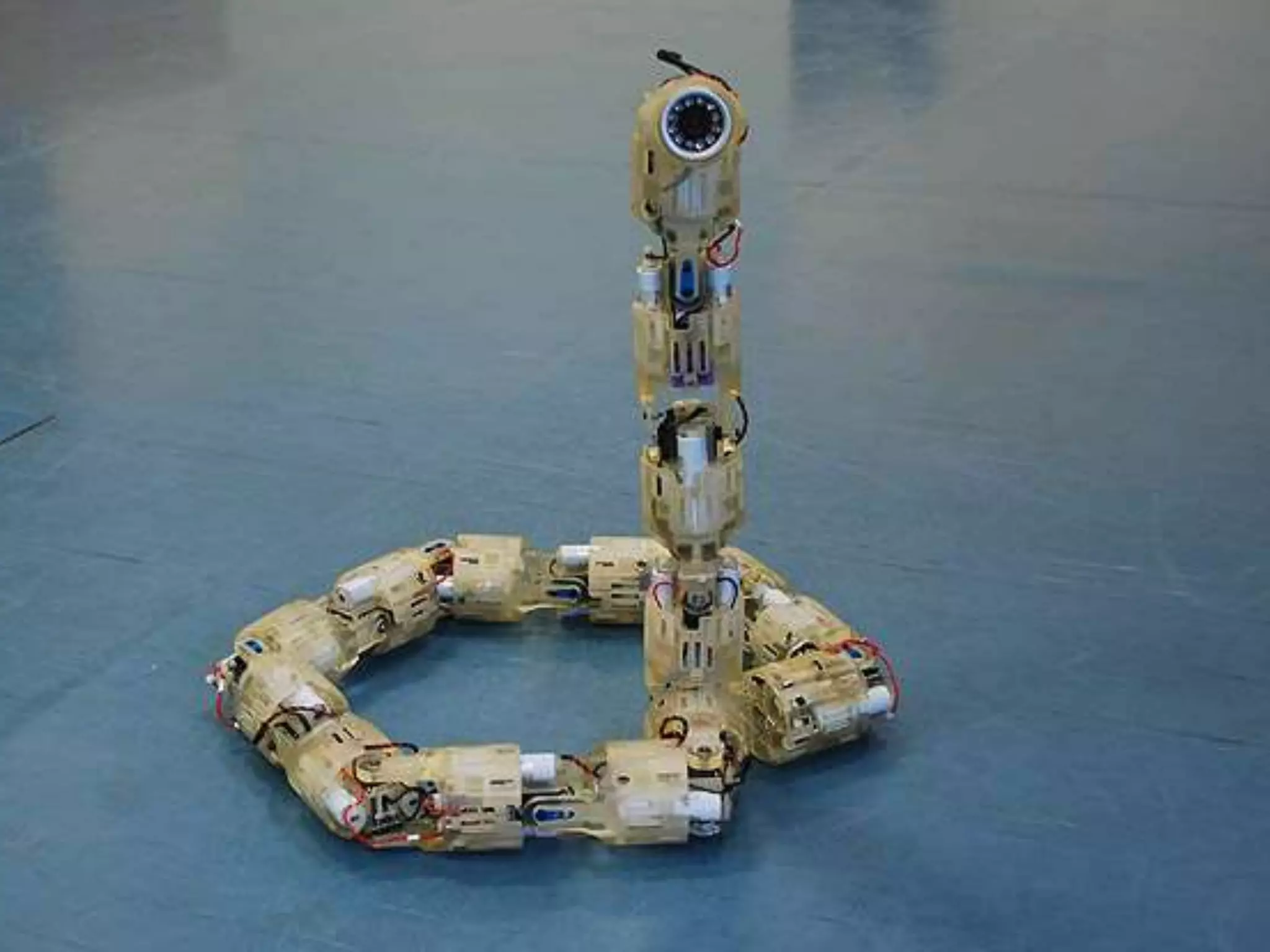
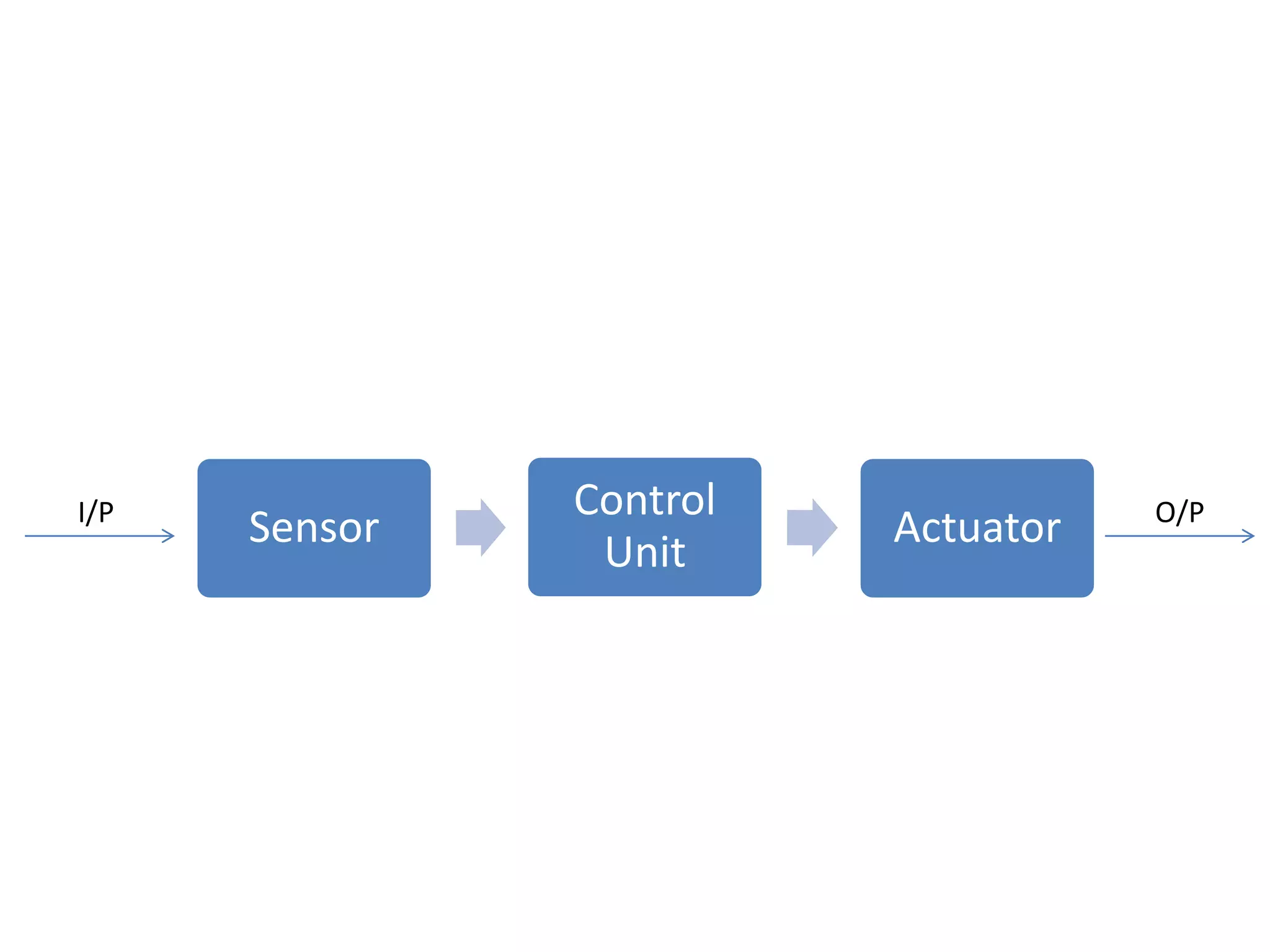
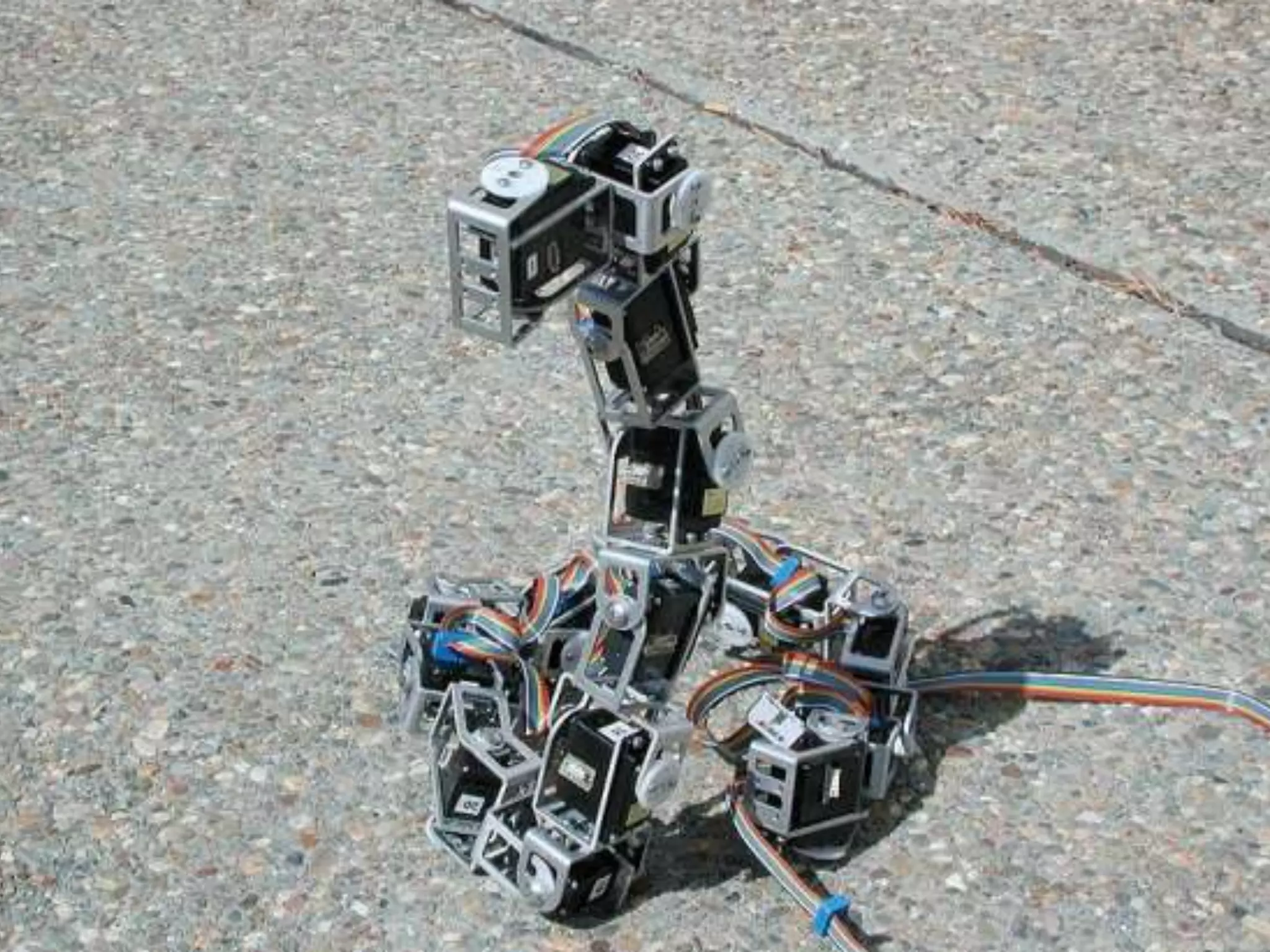


Snakebots are robots inspired by snakes that are constructed of linked modules, allowing them to move into tight spaces. They have various applications in space exploration, the military, and medicine. Snakebots can maneuver inside the human body to assist with medical procedures or slither underground to perform geological surveys. Some examples include rescue snakebots developed by the US Army and medical snakebots created by Carnegie Mellon University. They work by using sensors to guide motors in each module via a central computer and microcontrollers, enabling different types of locomotion. While promising versatile robots, snakebots also face control and path planning challenges.