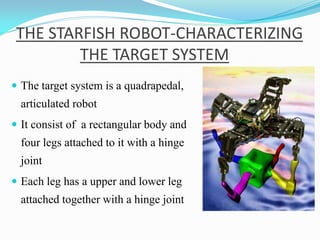
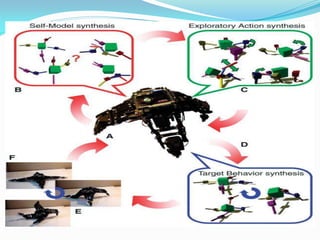
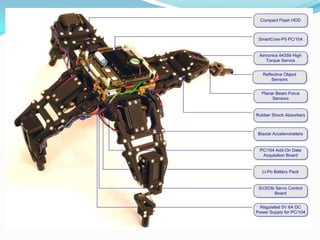
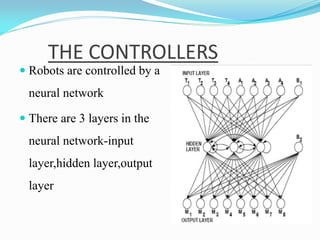
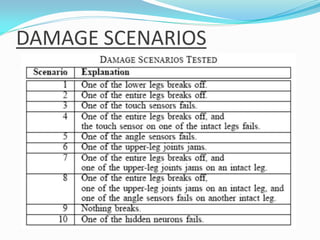
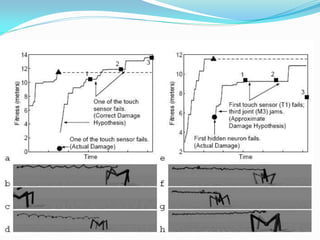
This document describes an experiment on a quadrapedal robot designed for self-healing capabilities. The robot consists of a body with four legs, each with two joints, and is equipped with sensors and actuated by servomotors. The robot uses an internal neural network model to autonomously synthesize predictive models of its own structure. The experiment involves introducing damage scenarios to test the robot's ability to recover through self-modeling, exploratory action, and adapting its target behavior based on its new configuration. The robot is able to detect changes to its morphology and continually update its internal model through exploration and hypothesis testing to compensate for damage.