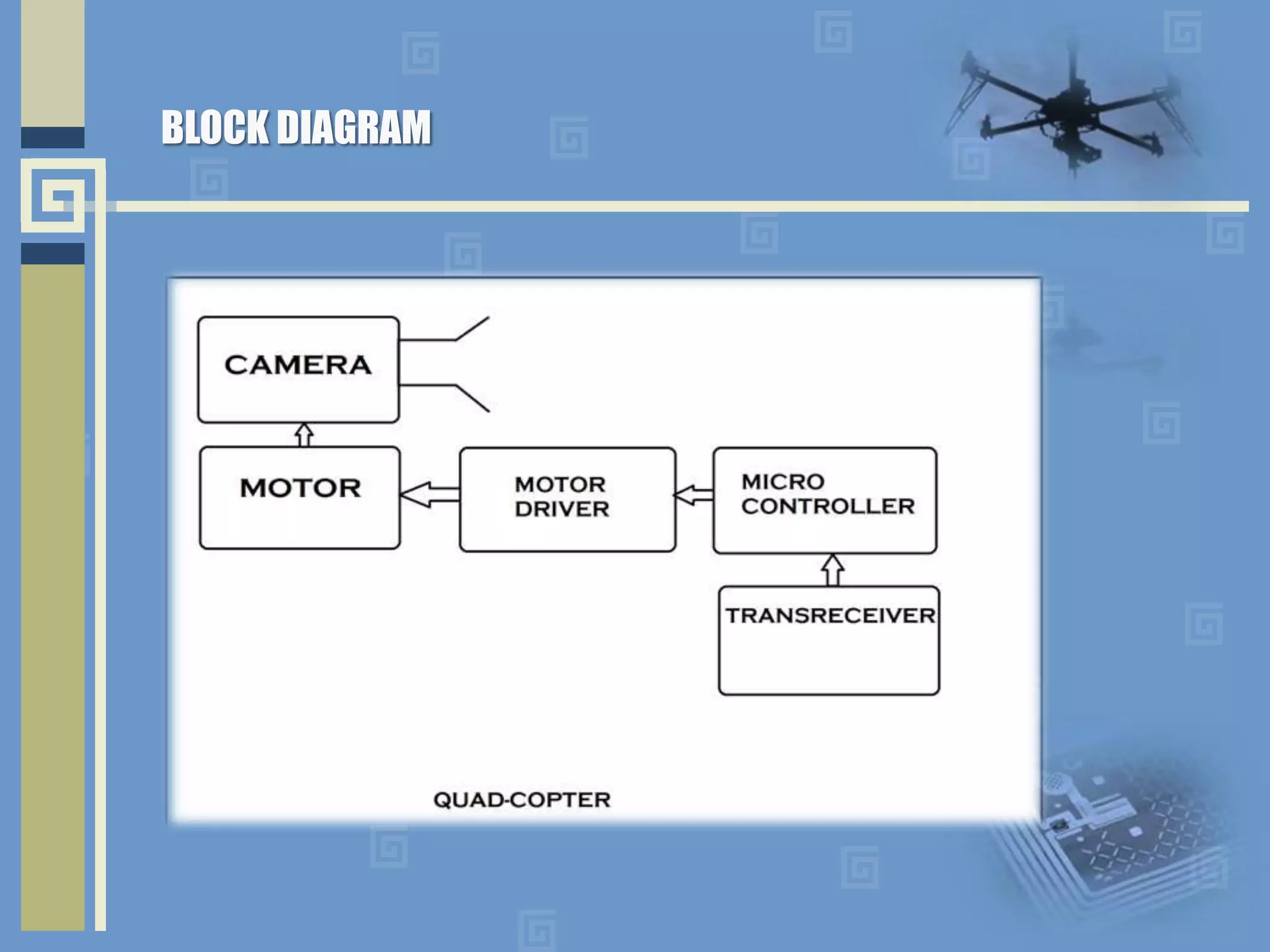
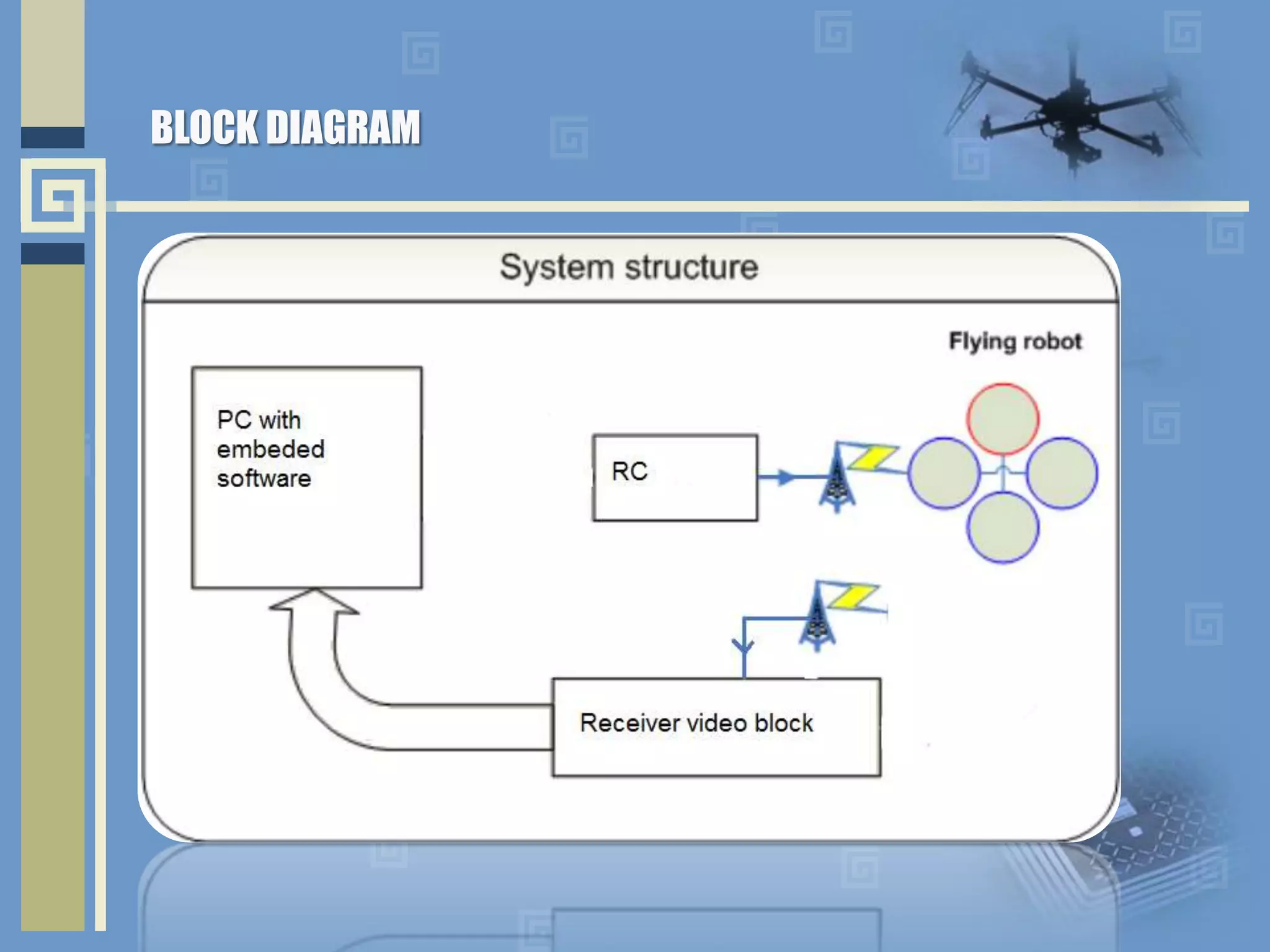
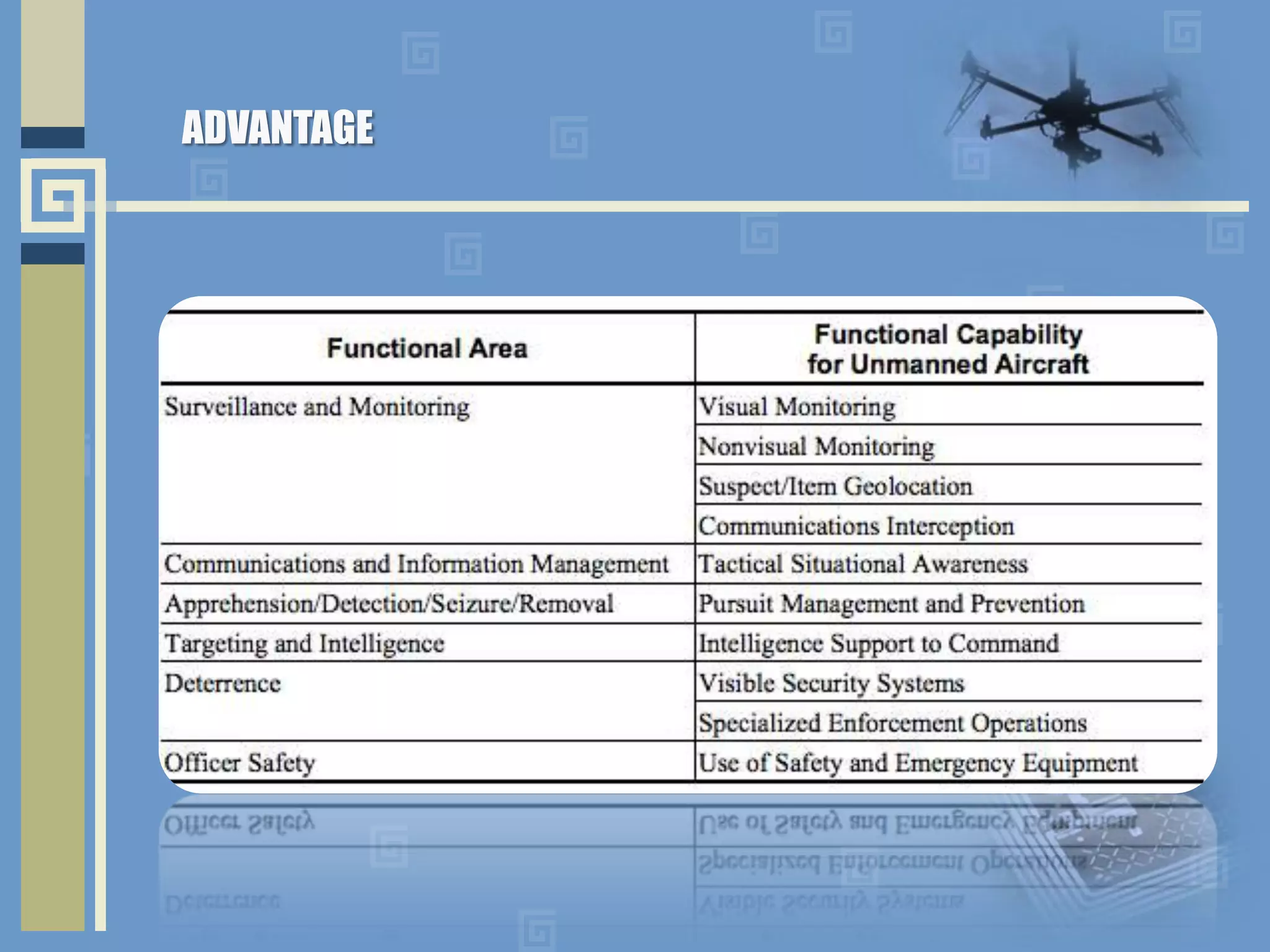



The document describes a project to create an autonomous flying surveillance robot (FSR) that can operate indoors and outdoors under any weather conditions. A group of 4 students from Lokmanya Tilak College of Engineering are developing the FSR. It will use a camera for aerial surveillance and inspection. Sensors and a PID control system will stabilize the flying robot and make it easier to control. The FSR has applications in hazardous environments, defense, security, inspections, and more.