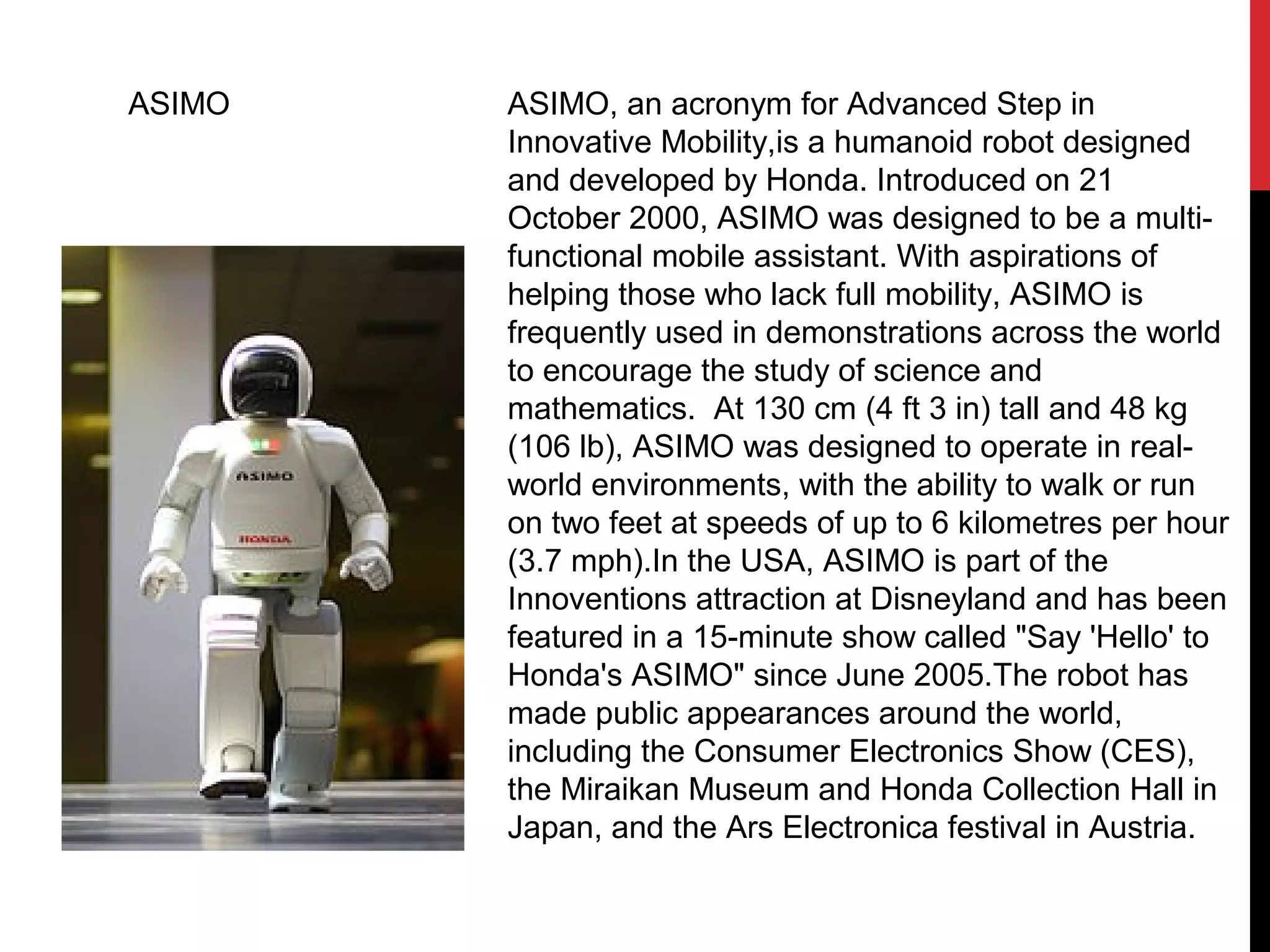
A robot is an automated device often resembling humans or animals, developed through history from early designs by Leonardo da Vinci to modern programmable machines like Unimate. Robots are used to eliminate human operators in various fields to save labor and reduce costs, particularly in dangerous or harmful environments, including military, medical, and industrial applications. Notable examples of advanced robots include NASA's Valkyrie, the competition-winning SchaFT, and Honda's Asimo designed for real-world assistance.