Downloaded 344 times

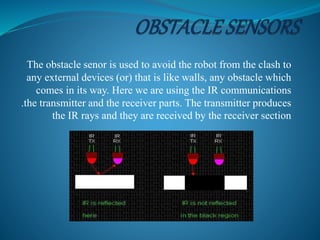

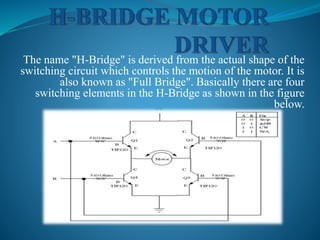
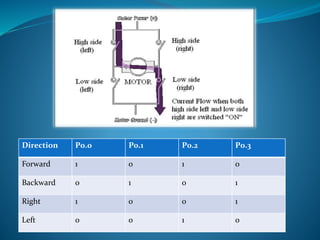






The document presents a seminar on the design and development of an obstacle avoidance robot utilizing embedded systems, focusing on the implementation of infrared sensors and microcontrollers for obstacle detection and navigation. Key advantages include autonomous movement and ease of programming, while disadvantages involve limitations in range and control. The robot has potential applications in toys, military, and industrial settings, with suggestions for potential enhancements using wireless technology.