
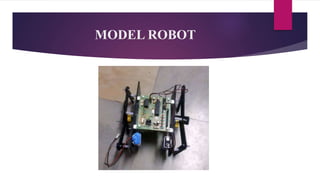





The document outlines the development of a six-legged hexapod robot designed for basic mobility tasks like walking and climbing steep terrains. It discusses the robot's modular leg design, its components, and the programming and mechanical structure necessary for its functioning. The report also emphasizes potential applications in exploration and rescue operations in various environments.



































































