Downloaded 314 times

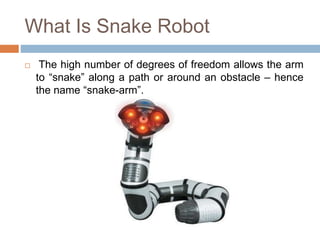
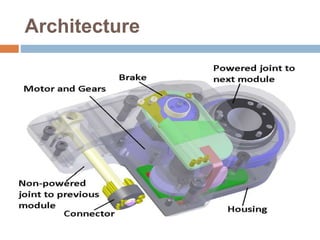
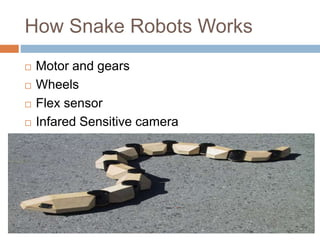
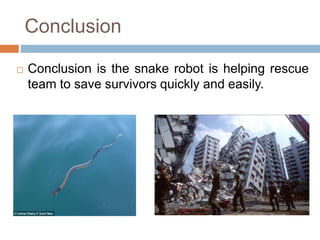

This document summarizes the key aspects of snake robots. It describes snake robots as having a high number of degrees of freedom that allows them to move in snake-like motions. The document then provides details on the developer and year a snake robot was developed. It lists the typical components of a snake robot including motors, gears, wheels, flex sensors and infrared cameras. It discusses how snake robots work and their applications in industrial and search and rescue operations. The advantages are their ability to move across uneven and soft terrain while disadvantages are their high costs and difficulty to control.