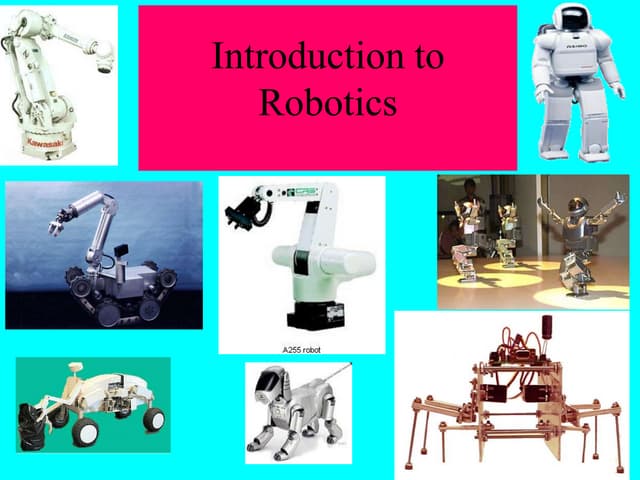
1) The document introduces robotics, defining a robot as a reprogrammable machine designed to perform tasks.
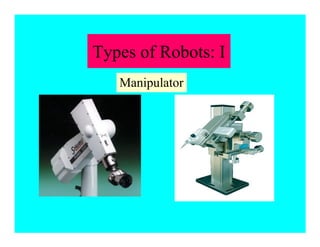
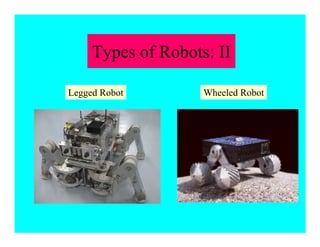
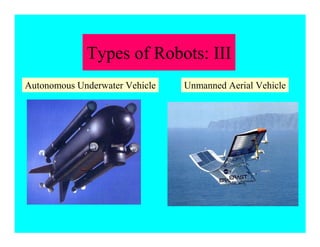
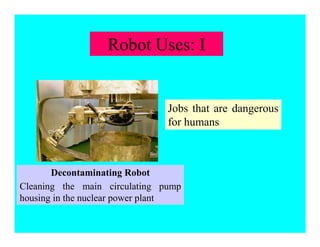
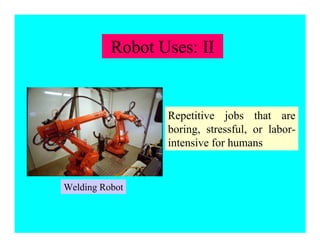
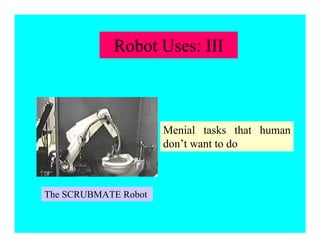
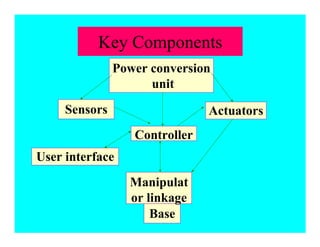
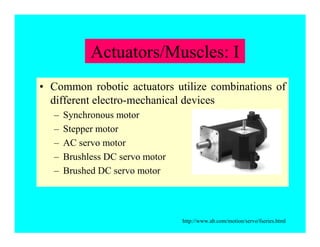
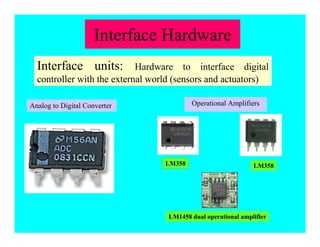
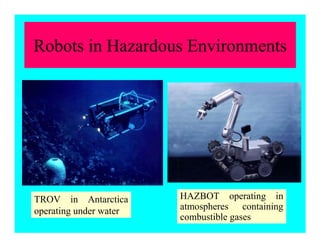
2) It discusses the types, uses, history, key components, and applications of robots. Robots are used for dangerous, repetitive, or menial tasks.
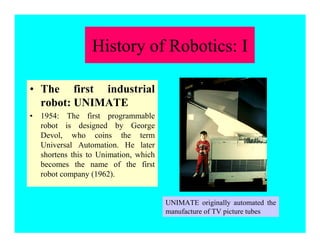
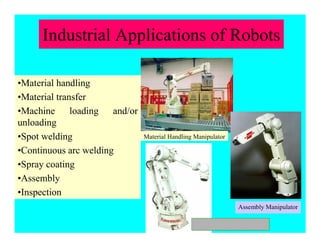
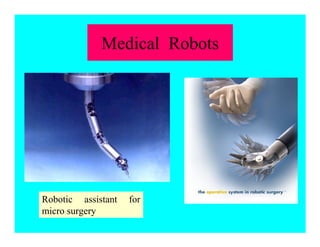
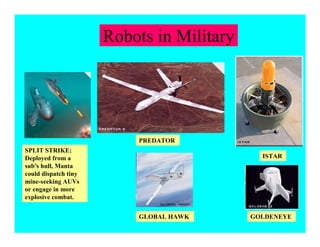
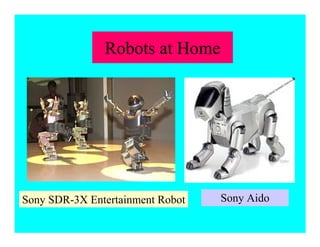
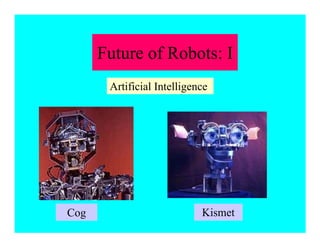
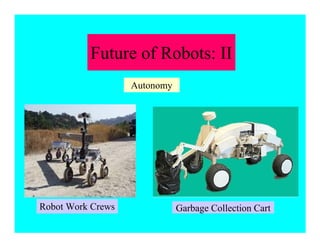
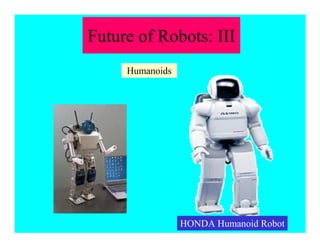
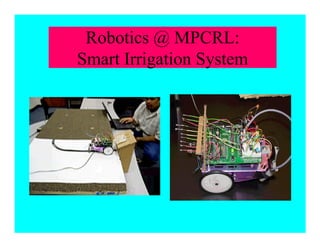
3) The future of robotics involves greater autonomy, with humanoid robots and robot work crews. Applications include agriculture, automotive, military, medical, space, and more.