
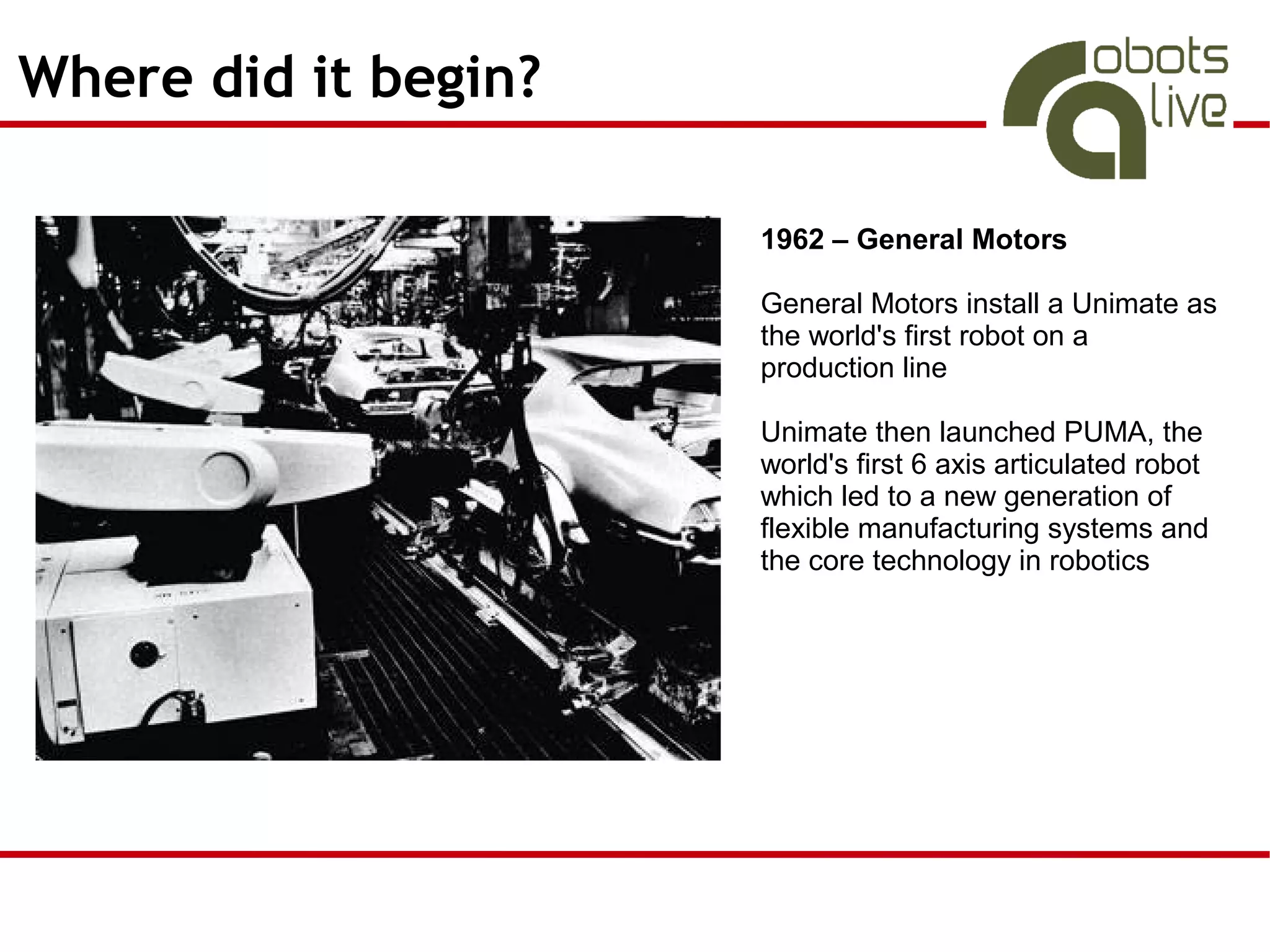
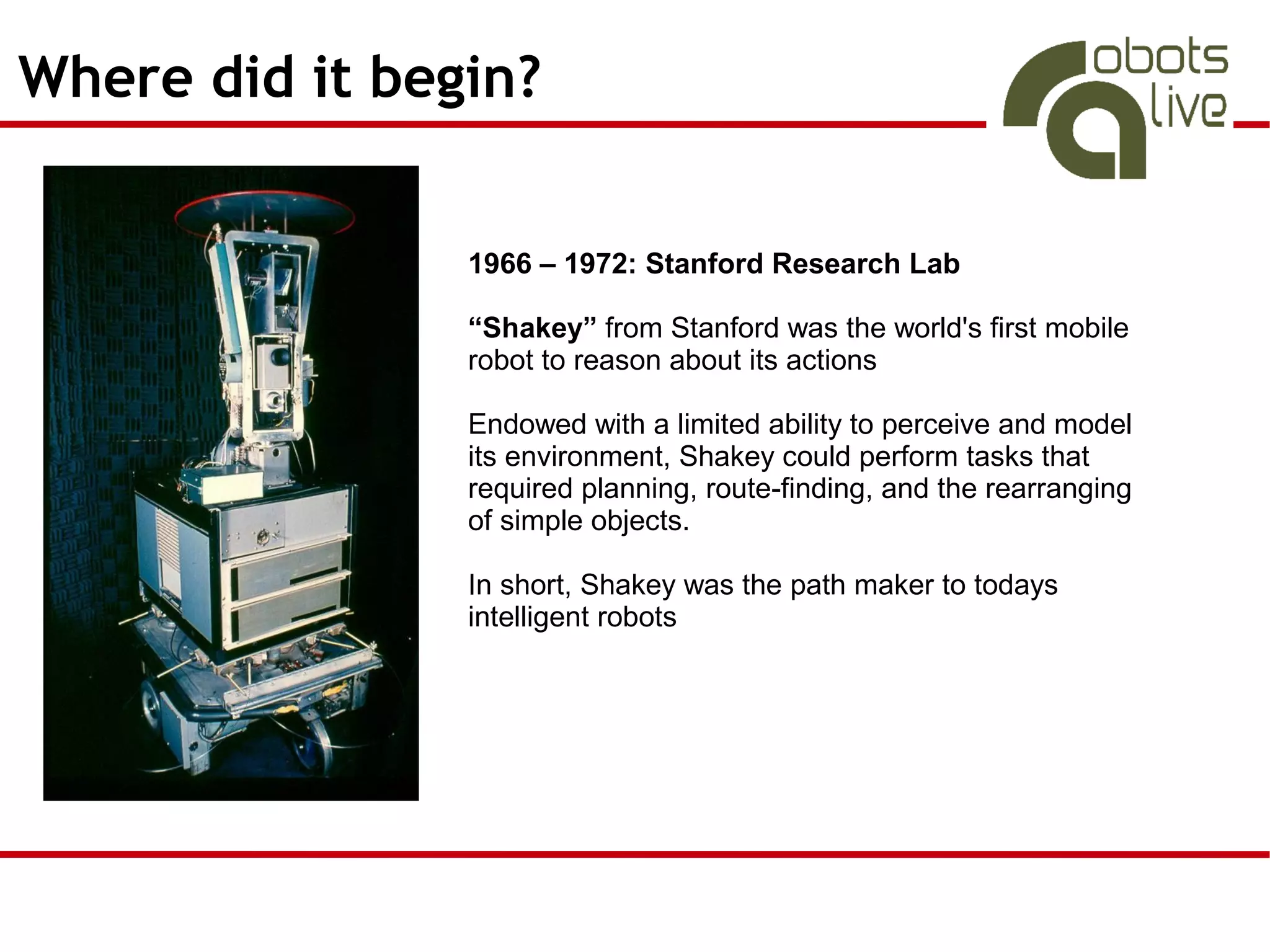
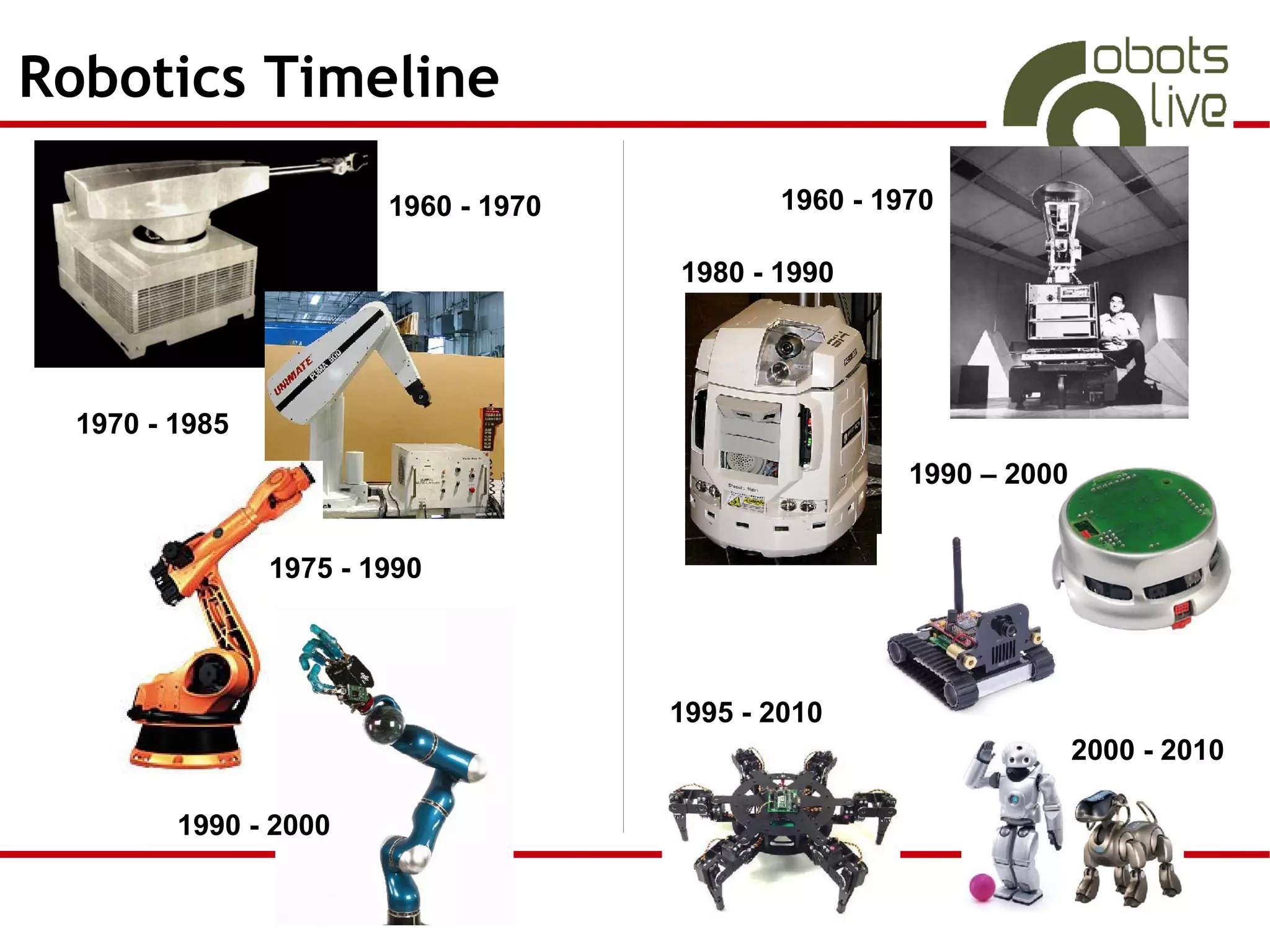



The document outlines the development of robotics from the introduction of the Unimate in 1962 to modern mobile platforms and adaptive robots. It covers key milestones in robotics, including the emergence of AI for navigation and obstacle avoidance, as well as evolutionary learning systems that enhance robot functionality. The summary emphasizes the evolution towards adaptable, safe, and interactive robots capable of performing complex tasks in various environments.



































































