Downloaded 443 times





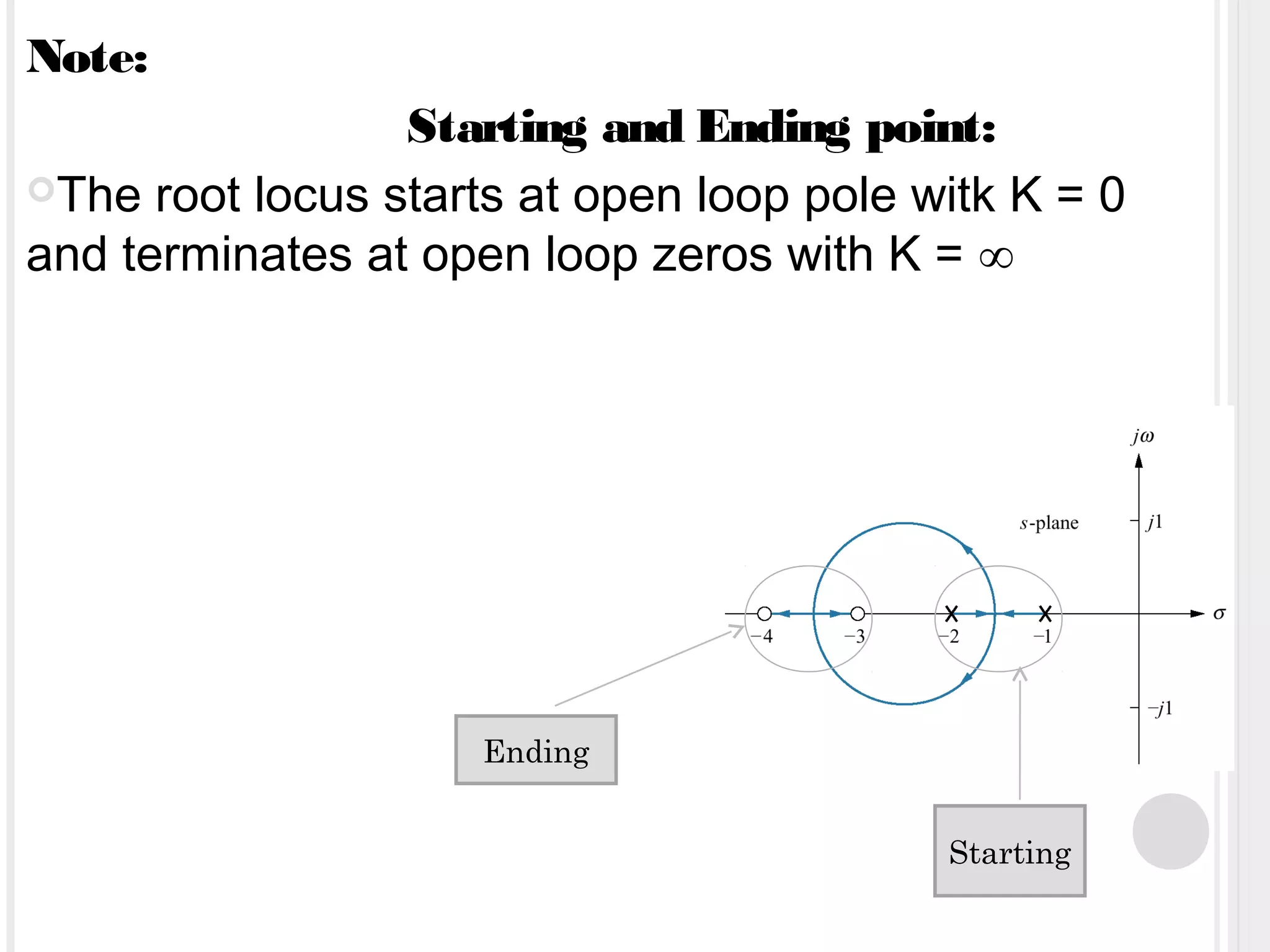
















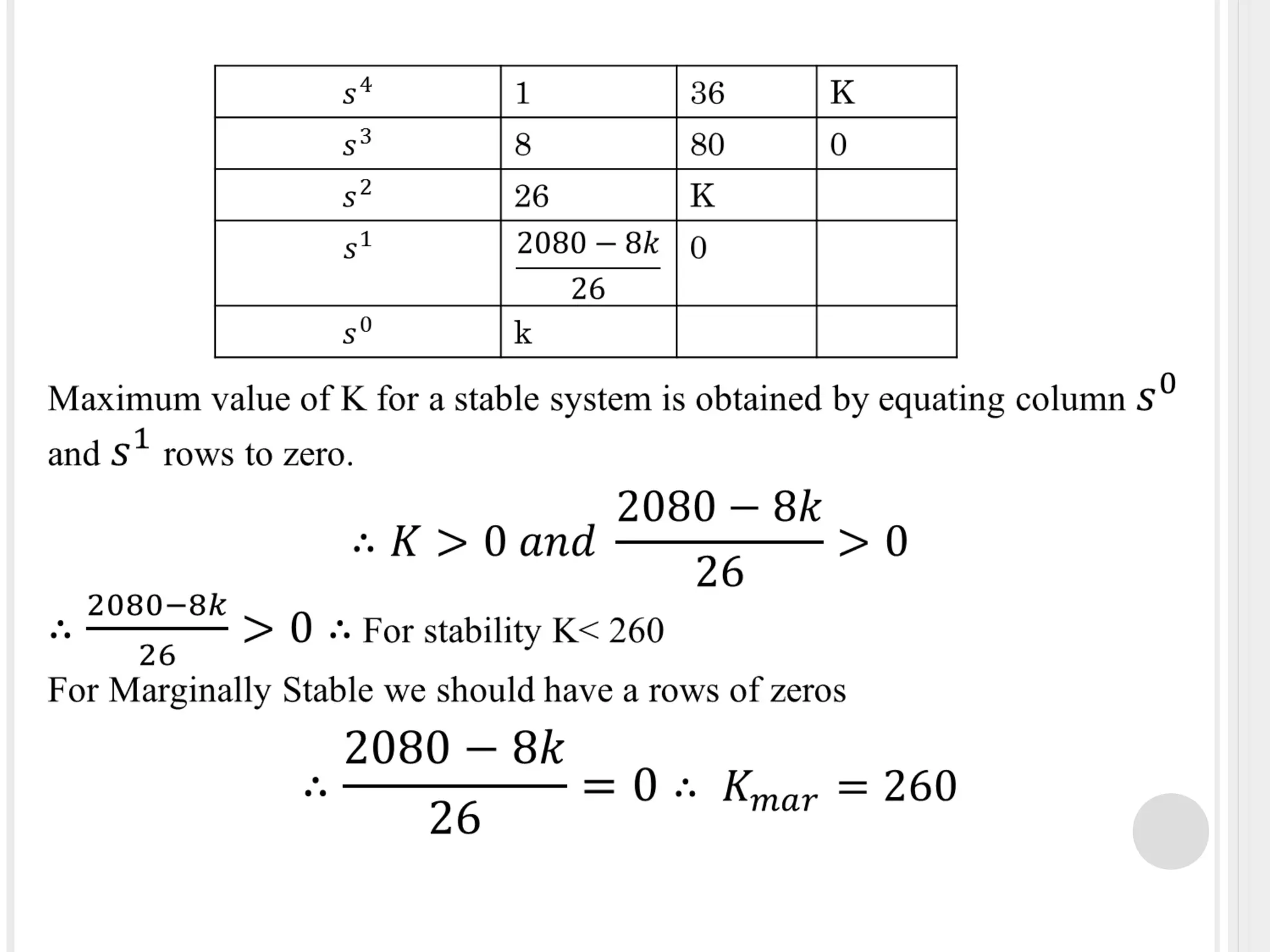






The document discusses root locus in control system engineering, describing its significance in analyzing system performance as parameters change. It outlines rules for constructing root loci, including symmetry, the relationship between poles and zeros, and methods for determining breakaway points and intersections with the imaginary axis. Finally, the document suggests using MATLAB for visualizing the root locus of specific feedback systems.























































































