Downloaded 44 times

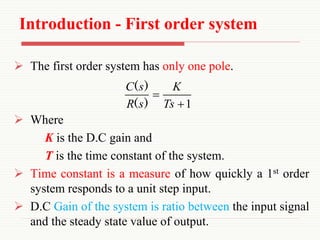
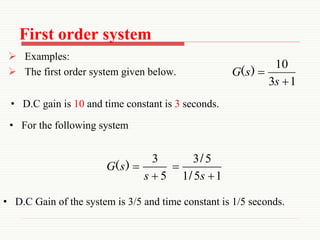
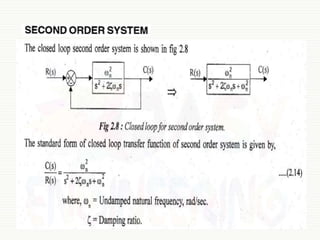
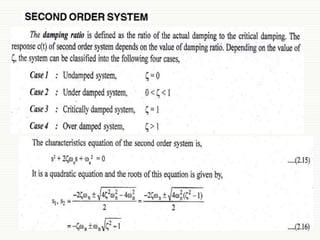
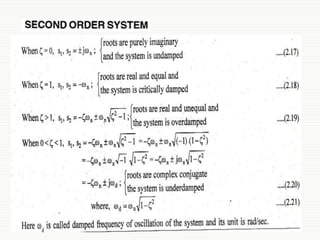
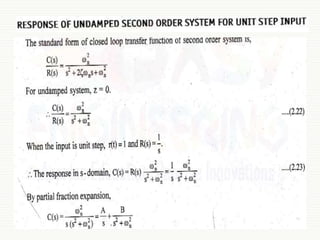

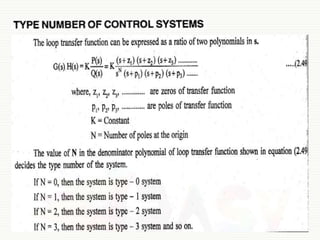






This document summarizes key concepts about first and second order control systems. It discusses: - The characteristics of a first order system, which has one pole and is defined by its DC gain (K) and time constant (T). - Examples of first order systems and how to determine their DC gain and time constant. - That a second order system can have different responses depending on its parameters, such as damped or undamped oscillations. - How to determine the undamped natural frequency and damping ratio of a second order system by comparing its transfer function to the general second order transfer function. The document then provides example problems for determining properties of first and second order systems. It concludes by